DJI Mavic 2 Pro после полугода использования
Эта статья посвящена дрону DJI Mavic 2 Pro, которым я владею уже больше полугода и содержит как субьективное описание достоинств и проблем, так и кучу фотографий в спойлерах. Все изображения с целью экономии трафика пропущены через оптимизатор mozjpeg.
Мой первый дрон в детстве был таким

Их у меня было три. Первый не взлетел, потому что я открыл коробку ещё в автобусе по дороге домой и потерял гаечку, которая держит верхнюю треугольную жёлтую плашку, удерживающую лопасти. У второго протёрся пусковой механизм капроновой нитью и лопнула резинка внутри, которая скручивала эту нить обратно. Третий прожил дольше всех, но его унесло ветром.
Дальше был этот вертолётик, с которым я игрался дома, потом был такой же, но с камерой, за ним пошли дроны Syma x5 и x8 pro, в пультах которых я перепаивал их убогие антенны на нормальные из wi-fi роутеров и это работало шикарно. Потом был Walkera QR X350 Pro с отдельным подвесом для камеры и китайским аналогом GoPro и вот наконец я взял Mavic 1 Pro на день в аренду и понял, что всё это время я занимался не тем. Я, конечно, его потом купил и год с удовольствием летал, но анонс Mavic 2 Pro лишил меня покоя, а мой бюджет — двух с лишним тысяч австралийских долларов.


Проблемы и особенности, о которых не сказано в спецификациях или в рекламе
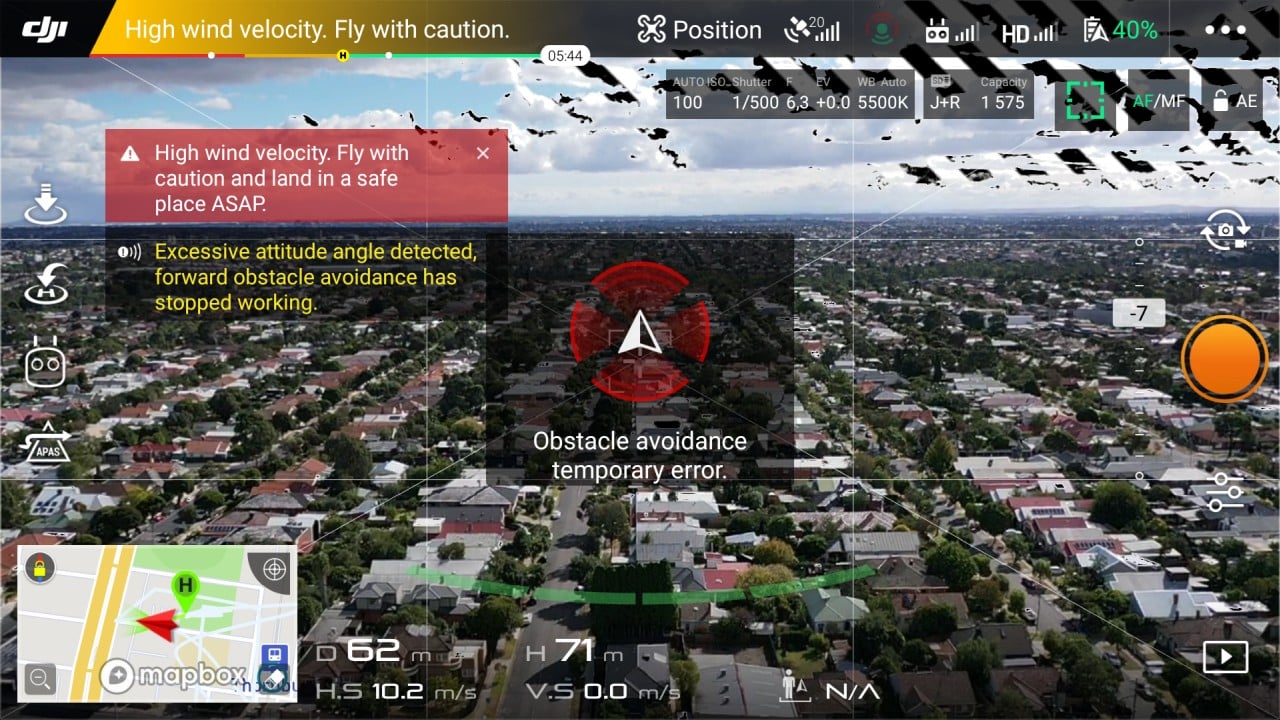
Mavic 2 в обычном режиме летает быстрей, чем первый. Настолько быстрей, что к этому пришлось отдельно привыкать и если давить полный газ вперед с небольшим встречным ветром — угол наклона корпуса вперёд делает передние датчики препятствий бесполезными, о чём нам сообщает приложение на телефоне.
Пропеллеры в комплекте сразу идут с пониженным содержанием асбеста шума, в то время, как у первого Мавика они были попроще.
В целом суть такова — эти пропеллеры имеют более оптимальную аэродинамическую форму и создают большую подъёмную силу, чем стоковые при равных оборотах. Как следствие — для того, чтобы просто висеть нужно крутить их медленней, по моим субъективным замерам в духе «плюс/минус километр» — на 20%.
Проверялось следующим образом — на пульте есть тахометр, но я только сейчас задумался — обороты какого из четырёх моторов он показывает. Я думаю, что усреднённое значение со всех четырёх. Так вот — со стоковыми пропеллерами там 530 об/мин ± 50 в зависимости от ветра. А вот с пафосными пропеллерами — 420 об/мин ± 50. Как следствие более низких оборотов — звук не то, чтобы тише, он просто ниже по тональности, что в том числе воспринимается и как меньшая громкость.
Послушать и сравнить можно здесь:
На мой субъективный взгляд снижение оборотов двигателей в целом даёт пару дополнительных минут полёта, поскольку энергии расходуется меньше. Но специально я это не тестировал.
Сами пропеллеры — слева Mavic 1, справа — Mavic 2 / platinum.

У пульта стики теперь откручиваются, что с одной стороны уменьшает возможность повредить пульт при переноске, с другой — их можно уронить и потерять. Снизу есть дополнительный разъём USB, (как и у первого Мавика) куда можно подключить планшет или телефон или ещё что-нибудь, но этот порт работает только если вытащить боковой кабель, даже если он никуда не подключён. Это в своё время заставило меня думать, что у меня пульт бракованный и помогла только случайность, когда я после зарядки пульта опять подключил к нему планшет без бокового провода и всё заработало.

Датчики препятствий
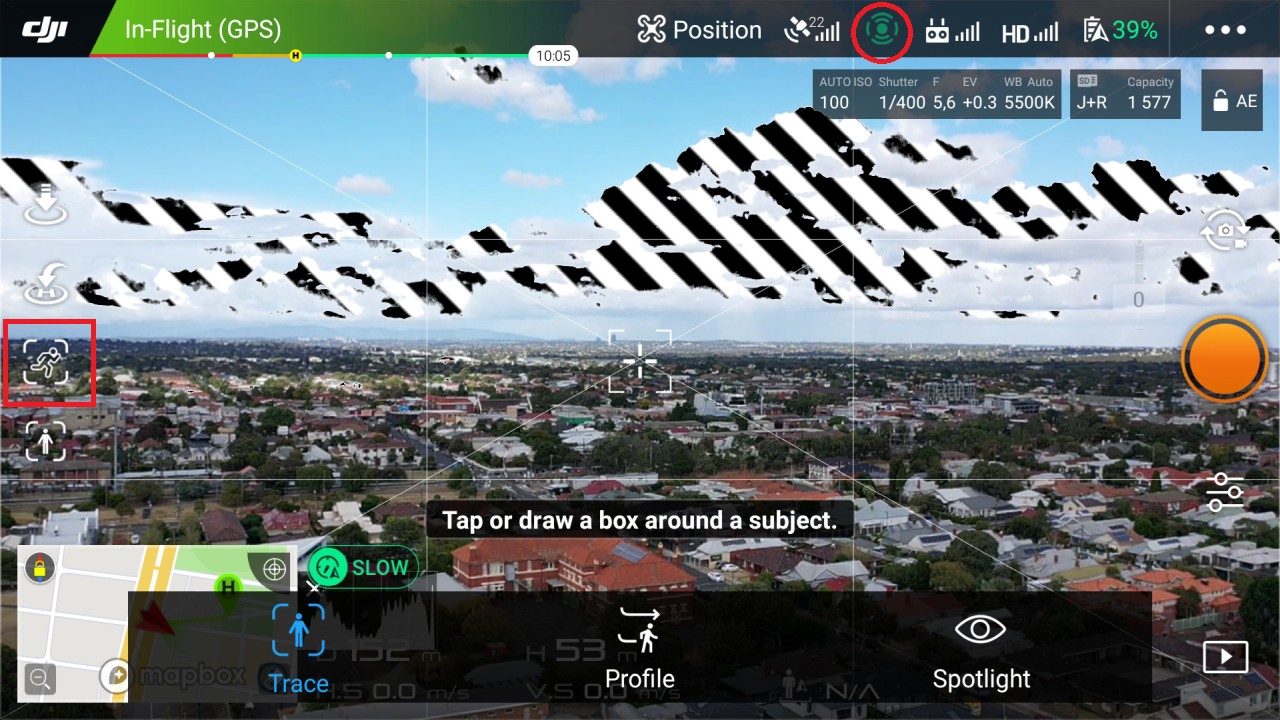
В рекламе идёт упор на то, что дрон со всех сторон увешан сенсорами и ни за что никуда не врежется. По факту все датчики работают только в двух режимах — Active Track и Tripod. В обычном режиме не работают боковые сенсоры, а в спортивном — вообще ни один. Кроме того, в Active Track есть «медленный» и «быстрый» режимы, во втором так же выводится предупреждение, что датчики будут отключены.

Active Track (медленный) — все датчики работают.
Лично у меня в Active Track дрон жёстко тупит на боковых препятствиях, потому что по бокам у него только одна камера, которая определяет наличие препятствия, но не расстояние до него, поэтому пролетая в метре от дерева дрон просто останавливается и жалуется на препятствие сбоку, хотя оно вообще ему никак не мешает.
Отдельно стоит упомянуть режим Tripod (штатив).
Изначально у первого Мавика и до определённого обновления прошивки у второго, это был режим в котором дрон еле двигается, если пытаться им управлять, но при этом все силы тратит на то, чтобы оставаться неподвижным несмотря на ветер. Отличный режим для фотографий.
После обновления в этом режиме теперь можно задавать скорость передвижения по горизонтали, вертикали и поворотов, так что можно использовать его и для съёмки видео. Отдельным бонусом идёт работа всех датчиков.

Камера
То, ради чего всё затевалось.
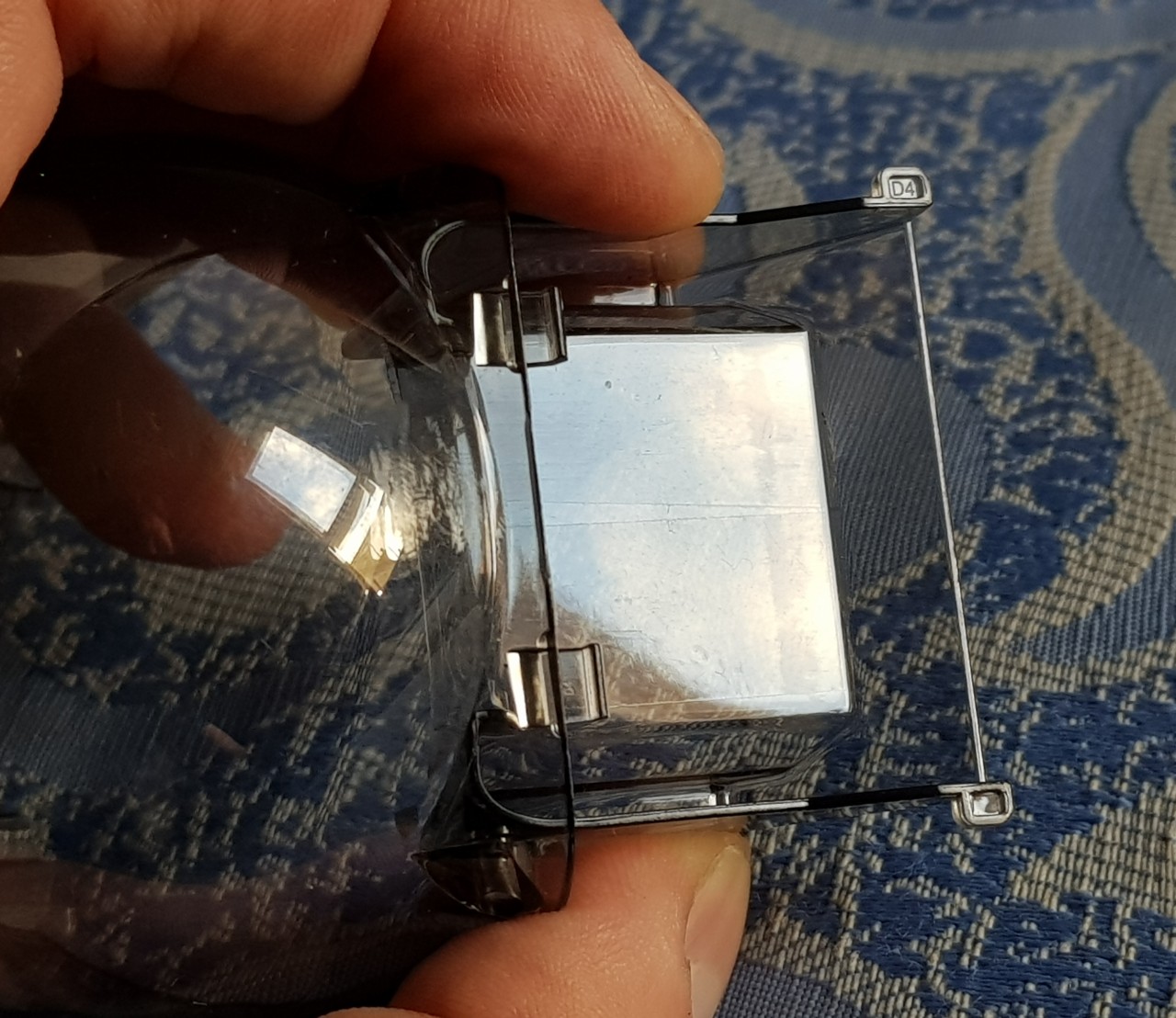
Первая проблема с камерой — это пластиковая крышка. Она царапает камеру сверху каждый раз, когда я надеваю и снимаю эту крышку.

Решение состоит в том, чтобы наклеить скотч на поверхность, трущуюся о камеру. Если приглядеться — видно две немного расходящиеся полоски. К сожалению, узнал я об этом слишком поздно и товарный вид уже подпорчен.
Вторая проблема — непонятные изменения в настройках видео при смене полётных режимов.
В обычном режиме есть варианты видео — 2.7K 60fps и 1080p 120fps.


Но стоит переключиться в режим Active Track и эти режимы куда-то пропадают.


Причём частота кадров меняется самопроизвольно и без каких-то уведомлений. При возврате из Active track в обычный режим она не меняется обратно и остаётся той же. Понятия не имею почему так происходит и каким образом режим полёта дрона вообще может влиять на настройки камеры.
В режиме Hyperlapse (типа TimeLapse) есть только один формат видео — 1080p 25 fps H264 и он там прибит гвоздями. То есть вообще нельзя ничего изменить, кнопки для настройки видео просто нет.

Решение — поставить галочку «сохранять исходные фотографии» и потом из них можно хоть 4К 120fps сделать, но руками.

Сама по себе камера, Hasselblad с однодюймовым сенсором, должна быть бомбой, но на Youtube появилось видео от пользователя Cliff Totten с форума Mavicpilots, где он обращает внимание на странную проблему с камерой.
Если смотреть 35 минут не хочется — краткая выжимка:
в видео поднимается проблема мутного видео в режиме 4К, которое выглядит очень похоже на растянутое видео 2.7К. Клифф выдвигает гипотезу о том, что DJI столкнулись с проблемой перегрева сенсора и не смогли обеспечить достаточное охлаждение ему в таком маленьком корпусе. Это, по его мнению, явилось причиной отсрочки презентации The bigger Picture, и так как проблема проявилась почти перед релизом — DJI пошли на хитрость и программно сделали два режима 4К — обычный и HQ. Первый снимает видео 2.7К и растягивает его до 4К, из-за чего проявляется мыло, второй — настоящий 4К, но использует только часть пикселей в середине сенсора, что выглядит, как кропнутое видео с меньшим углом обзора.
Я прогнал те же тесты с фотомишенью и не обнаружил этой проблемы у себя. Возможно, потому что у меня дрон из второй партии, а первая — с проблемой, разлетелась, как горячие пирожки и в Мельбурне через неделю после выхода нельзя было найти Mavic 2 Pro вообще нигде — всё было распродано.
Тем не менее, я всё равно не снимаю в 4К, потому что мне смотреть его не на чем и мне больше нравится 60 кадров в секунду, так что 2.7К для меня вполне достаточно.
Ночной режим. Это просто нечто.
2 Мб фоток ночного Мельбурна
Случайные виды Австралии, 2.6 Mb
Вывод
В целом я очень доволен и на мой взгляд достоинства Mavic 2 Pro существенно превосходят его недостатки. Но я думаю, что об этих недостатках хорошо знать перед покупкой, а не после.
Надеюсь кому-нибудь мой опыт будет полезен.
