Будут ли роботы стоять в пробках?
 Эта история началась с того что я застрял в пробке на хайвее, не особенно большой, но полчаса простоял практически на месте. И, как это часто бывает, пробка рассосалась сама по себе — не было впереди ни аварии, ни ремонта, просто машины в какой-то момент начали двигаться быстрее, еще быстрее, и все — свободная дорога впереди.
Эта история началась с того что я застрял в пробке на хайвее, не особенно большой, но полчаса простоял практически на месте. И, как это часто бывает, пробка рассосалась сама по себе — не было впереди ни аварии, ни ремонта, просто машины в какой-то момент начали двигаться быстрее, еще быстрее, и все — свободная дорога впереди.
Чем обычно занимаются в пробках? Ну кто-чем и когда-как, а я в тот день был в мирном философском настроении — просто сидел и размышлял. Вспомнил в частности пост на Гиктаймс о робомобилях где в комментариях бурно сравнивали манеру вождения людей и роботов и в конце кажется пришли к выводу что будущее на дорогах за AI, при нем и движение станет безопаснее и средняя скорость возрастет. Интересно, а пробки тогда будут? Другими словами, насколько пробки обусловлены внешними (обьективными) обстоятельствами, и насколько эффектом толпы, агрессивной или наоборот тормозной манерой вождения? Заодно вспомнилась прочитанная когда-то книга где утверждалось что моделирование дорожного трафика — одна из самых сложных математических задач, которая до сих пор не решена. Ну это наверное давно уже неправда, читал я это давно и книга уже тогда была не новой, сейчас уже наверняка и теории правильные написали, и на компьютерах своих все посчитали. Хотя… пробки же остались? В общем, полет фантазии было уже не остановить.
Итак, под катом мы попытаемся построить более-менее осмысленную модель движения транспорта на дороге и, если повезет, постараемся смоделировать разницу в вождении водителя-человека и AI. Я разумеется отдаю себе отчет что этой проблемой профессионально занимаются целые организации и вообще очень умные люди, но тем интереснее. И вообще, ставьте себе нереальные цели.
И еще одно — я убежденный сторонник думанья головой, поэтому в этом посте компьютерного моделирования не будет, вообще совсем не будет, только хардкорный карандаш и бумага.
Для начала надо сказать что существует два похода — микроскопическая модель и статистическая. Первая рассматривает отдельно движение каждой машины в потоке как отдельный набор независимых переменных в одной огромной системе уравнений и, по понятным причинам, пользуется наибольшей популярностью у теоретиков. Вторая рассматривает всю совокупность как непрерывную среду где каждая отдельная машина описывается лишь вероятностно. Из чувства противоречия с этого второго случая и начнем.
Простейшая статистическая модель
Пусть имеется одна полоса с равномерно распределенными машинами с линейной плотностью ρ. Однако скорости у всех машин разные, будем считать что вероятность иметь скорость v описывается плотностью вероятности P (v, t) зависящей естественно от времени и равной в момент t=0 некоторой известной функции P (v,0). Можно без ограничения общности считать что вероятность P (v, t) определена на интервале от нуля до (да простят меня дорожные полиции всех стран) бесконечности. Определены также понятия нормировки и средней (групповой) скорости:

 (1.1)
(1.1)
За время dt каждая имеющая скорость v проходит расстояние vdt и может как «исчезнуть» догнав более медленную и потеряв скорость, так и «увеличить массу», будучи догнанной более быстрой. Легко сообразить что за интервал времени dt вероятность машине со скоростью v догнать более медленную машину со скоростью u (и затормозиться) будет P (u, t)(v-u)dtdu и симметричноe выражение для вероятности быть догнанной более быстрой машиной (и затормозить ее). Таким образом изменение плотности вероятности со временем:  (1.2)
(1.2)
Немного подумав достаточно легко понять что решение должно иметь вид A (v)B (t)exp (-ρvt) и отсюда полное решение:  (1.3)
(1.3)
Уравнение получилось изящное, но незамкнутое, поскольку средняя скорость сама зависит от времени. Однако нас не интересуют детали изменения плотности вероятности P (v, t) со временем, тем более что они зависят от произвольной начальной функции P (v,0), поэтому мы можем воспользоваться (1.1) чтобы замкнуть уравнение относительно ̅v и отсюда
и отсюда (1.4)
(1.4)
вот с этим уравнением уже можно работать, давайте рассмотрим пару частных случаев для иллюстрации.
Пусть изначально все машины движутся строго с одной скоростью:  отсюда
отсюда как и должно быть.
как и должно быть.
Пусть теперь изначально скорость распределена равномерно в некотором интервале:

 при этом средняя скорость падает как 1/t a среднее пройденное расстояние растет логарифмически
при этом средняя скорость падает как 1/t a среднее пройденное расстояние растет логарифмически — и это хорошая новость для тех кто читает этот пост стоя в пробке — до места вы все таки доберетесь, правда за экспоненциальное время.
— и это хорошая новость для тех кто читает этот пост стоя в пробке — до места вы все таки доберетесь, правда за экспоненциальное время.
Тут есть однако одно кажущееся противоречие — если в потоке присутствуют машины со сколь угодно малой скоростью, как может среднее пройденное расстояние увеличиваться со временем? Ответ в том что число машин со строго нулевой скоростью тоже равно нулю. Если мы возьмем начальное распределение в виде:  то есть почти все машины движутся с одинаковой скоростью, а некоторая очень малая часть просто стоит, то групповая скорость будет падать экспоненциально
то есть почти все машины движутся с одинаковой скоростью, а некоторая очень малая часть просто стоит, то групповая скорость будет падать экспоненциально и среднее пройденное расстояние стремится к фиксированному пределу.
и среднее пройденное расстояние стремится к фиксированному пределу.
Таким образом мы потратили пару листов бумаги и показали что на однополосной дороге все рано или поздно уткнутся в хвост самой медленной машине и будут тащиться с ее скоростью — блестящий результат. Попробуем теперь немного более реальный вариант.
Шаг навстречу реальности
Если вы читали внимательно, к этому месту у вас должно было возникнуть чувство законного недоумения —, а где же пробки? С какой стати мы полагаем линейную плотность ρ константой не зависящей ни от времени ни от координаты? В конце концов пробка и есть по сути скопление машин. Все правильно, в рамках нашей текущей модели мы рассматриваем профиль движения усредненный по очень большому интервалу, настолько большому что усредненная по нему плотность постоянна. Внутри него машины сбиваются в колонны между которыми совершенно пустые промежутки, но в характерном масштабе нашей модели все это несущественно. Характерный размер неоднородности, колонны или промежутка, растет со временем и вот, когда он наконец сравняется с характерным масштабом, пробка… могла бы возникнуть, но не возникает, потому что модель больше неприменима. Надо искать более детализированную модель. Обратите также внимание, что для отдельной машины движущейся в потоке нет никакого распределения по скоростям P (v, t) с которым мы работали раньше, существует только скорость v (x, t) и локальная плотность ρ (x, t). Вот с ней и поработаем.
Прежде всего, для плотности должно выполнятся уравнение непрерывности: 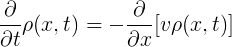 (2.1)
(2.1)
абсолютно фундаментальный закон по сути означающий что сколько в трубу втекло, столько должно и вытечь. Заметьте что ρv — это просто число машин пересекающих сечение дороги за единицу времени.
Разумеется у этого уравнения существует бесконечное множество решений, например это может быть произвольная функция f (x-vt) описывающая движение произвольного профиля плотности с произвольной скоростью v. Если перейти в систему координат движущуюся вместе с машиной, то это выражение принимает еще более простой вид: ρv=const. Если скажем плотность меняется по закону ρf (x -vt) и впереди участок дороги с пониженной скоростью u, u < v, то там профиль плотности будет выглядеть как Pf (x-ut), где ρv=Pu. Такая модель подобна идеальному газу и описывает идеальное поведение трафика на дороге — при уменьшении скорости происходит пропорциональное увеличение плотности, а число машин пересекающих сечение дороги в единицу времени постоянно (с точностью до флуктуаций f (x)), вы всегда можете рассчитать время за которое вы проедете определенное расстояние и оно не будет зависеть от других машин на дороге.
Так все-таки, где же пробки?
Модель идеального газа описывает состояние невзаимодействующих частиц, неидеальность начинается при учете взаимодействия. Аналогично получается и у нас — придется учитывать притормаживание когда машины оказываются слишком близко. Тормозной путь можно описать выражением v2/2a+vτ+d, где а — ускорение комфортного торможения оцененное (грубо) константой; τ — величина размерности времени и порядка времени реакции водителя; d — величина порядка длины автомобиля. Пространственная плотность ρ должна быть обратной величиной. Получается? Нет, очевидно что в пределе больших скоростей плотность должна падать как 1/v, а не 1/v2, а у нас получилось что даже поток машин через сечение дороги ρv падает с ростом скорости. Ошибка в том что водители вовсе не держат интервал обратно пропорциональный тормозному пути, это было бы так если бы впереди идущая машина могла бы остановиться мгновенно — слишком сильное предположение, на самом деле она тормозит с тем же самым ускорением a. Тогда у нас исчезает квадратичный член и получается разумное выражение:
ρmax=1/(vτ+d) (2.2)
, при увеличении плотности до 1/d (то есть бампер в бампер) машины могут только стоять, а при росте скорости поток стремится к пределу: ρv=1/τ. Это выражение для предельной плотности при данной скорости, если автомобили сойдутся еще теснее, они начнут притормаживать. Может быть я слишком подробно на этом остановился, но хотелось показать как правильно заложенная модель начинает корректировать сама себя, через рассмотрение частных и предельных случаев выявляет ошибки.
Пусть по дороге движется колонна машин со одинаковыми скоростью v и плотностью ρ. Если эта колонна вьезжает на участок с пониженной скоростью u

Однако, если плотность приближается к критической, может оказаться что новый участок дороги неспособен пропустить такой поток (максимальный поток машин через сечение дороги νmax (u)=uρmax (u)=u/(uτ+d) и монотонно уменьшается с уменьшением скорости)
ρ*=ρv/u > ρmax=1/(uτ+d).
Теперь в игру вступает уравнение (2.1) описывающее изменение скорости и профиля плотности, которое однако имеет бесконечное множество решений, включая нестационарные и колебательные. Давайте для оценки сверху возьмем идеальный случай оптимизирующий пропускную способность дороги, для этого каждую машину должен вести всеведущий демон Максвелла, но тем не менее. Тогда каждая машина будет притормаживать заранее в точно угаданный момент до мистически угаданной скорости u, примерно вот так:

Более того, граница торможения будет двигаться влево с легко вычисляемой скоростью:
[ρv-u/(uτ+d)]/[1/(uτ+d)-ρ]=[ν-νmax (u)]/[ρmax (u)-ρ] (2.3)
А что происходит на переднем фронте? Предположим что ограничение на скорость в некоторый момент исчезло, тогда фронт начнет испаряться — машины начнут ускоряться до начальной скорости v и фронт начнет тоже двигаться влево. Однако скорость испарения заведомо меньше скорости торможения; главным образом потому что водитель тормозит сразу же как только заметит стоп-сигналы впереди идущего, а для разгона ему нужно оценивать расстояние до впереди идущей машины и ее скорость. Оценить скорость испарения фронта достаточно трудно без привлечения эмпирических соображений, однако мы можем предположить что она может быть как больше, так и меньше скорости левой границы (2.3), которая в свою очередь зависит от ограничения скорости u. И, если она окажется меньше, то мы получаем что-то типа солитона на дороге — устойчивое образование, возникающее при случайном кратком торможении одной из машин и существующее конечное время. Важно добавить, что для возникновения такого солитона уже необязательно реального ограничения скорости, достаточно если одна из машин спонтанно замедлится на время больше τ до скорости меньше некоторой критической.
До собственно пробок остался один маленький шаг, достаточно заметить что образовавшийся солитон нестабилен, его плотность равна критической (2.2) и любое случайное достаточно сильное торможение одной из машин в колонне вызовет новый аналогичный процесс и образование нового уплотнения с еще меньшей скоростью. При достаточно большом времени жизни такого образования этот сценарий будет повторяться и лавинно накладываться один на другой вплоть до достижения разреженного участка на дороге или полной остановки машин в конце колонны, что мы собственно и наблюдаем в реальной жизни.
Сейчас можно было бы привлечь теорию вероятностей и прикинуть длину получившегося солитона (которая определяется флуктуациями плотности трафика), а так же время его жизни и вероятность возникновения еще больших уплотнений и шансы полной остановки движения, так же как и среднее уменьшение пропускной способности дороги. Короче, основываясь на этой простой модели возможно построить полное вероятностное описание дорожного трафика. Однако я подозреваю что давно исчерпал лимит на количество формул в посте, кроме того, потребовалось бы привлечение каких то эмпирических и/или количественных данных, чего я старался избегать всеми силами. Лично я уже достиг понимания как случаются пробки и получил от этого некоторое удовольствие. Кроме того я понял какая злая сила вырвала полчаса из моей жизни, и жить мне сразу стало лучше и веселее.
А как же роботы?
А с ними все просто, поскольку я не делал никаких человеко-специфических предположений, базовая модель верна и для них. То есть если заставить робомобили ехать по дороге на пределе ее пропускной способности, в потоке движения могут возникать спонтанные возмущения приводящие к замедлению вплоть до полной остановки. Однако вероятность таких возмущений можно постараться существенно понизить.
- Во-первых, в потоке состоящем исключительно из роботов гораздо реже возникают спонтанные флуктуации, роботы не чихают за рулем, не роняют зажженную сигарету, не отвлекаются на болтовню пассажиров и субьективных причин притормаживать у них практически нет. Однако обьективные причины (скользкий участок дороги например) все-таки остаются.
- Во-вторых, теоретически время реакции τ робота намного меньше, в пределе стремится к нулю. Однако я боюсь что разработчики робомобилей перестраховываясь искусственно его завышают в алгоритмах вождения. Со временем этот резерв тоже будет задействован.
- В-третьих, роботам чужды эмоции, в частности нетерпение, зависть и жадность. Это позволяет им держать дистанцию чуть-чуть больше минимально необходимой, в результате линейно чуть-чуть снижается пропускная способность, однако вероятность возникновения пробок падает нелинейно во много раз. Однако для этого необходимо чтобы на дороге робомобили как минимум преобладали.
- В-четвертых, и это самое существенное что отличает их от человека — роботы гораздо ближе к демонам Максвелла. В частности, если позволить им обмениваться информацией на дороге, можно создать виртуальный распределенный ИИ управляющий движением на каждом участке. Как простой пример — колонна из фур может очевидно выиграть если каждая будет знать скорость первой в колонне фуры в каждый момент. Еще один — если становится известно что где-то впереди (может быть достаточно далеко) начинается уплотнение, машины могут заранее увеличить интервал и таким образом блокировать распространение пробки. Ну и наконец, разгонное время можно кардинально уменьшить если машина получает сигнал об ускорении от впереди идущей, это позволило бы резко сократить время жизни солитона и предотвратить лавинный эффект.
- Ну и наконец для тех кто проектирует и строит дороги — не забывайте что у каждой дороги с ограничением скорости vmax есть максимальная пропускная способность порядка vmax/(τvmax+d) и, если ожидается увеличение потока (город растет) на каком-то участке до этой величины, хорошо бы заранее предусмотреть расширение дороги или увеличение максимальной скорости. Ну это уже из области абсолютных фантазий конечно.
Я не знаю какие модели разрабатываются сейчас производителями робомобилей, и вообще, готовятся ли они морально к тому времени когда они будут преобладать на дорогах;, но мне кажется что уже пора. Локальные алгоритмы вождения пора дополнять и расширять до кооперативных и тогда мы будем меньше тратить времени на стояние в пробках, а значит и мир станет немножко лучше.
PS: Изначально я планировал этот пост на Гиктаймс, но с удивлением обнаружил отсутствие подходящих хабов. На мой взгляд, правильным сочетанием было бы Математика+Занимательные задачи+Транспорт будущего, однако оказалось что первые два присутствуют только на Хабре, причем в разделе Разработка. Ну и ладно, пишу туда где хабы соответствуют.
Комментарии (9)
31 января 2017 в 07:21
+2↑
↓
Пусть имеется одна полоса с равномерно распределенными машинами с линейной плотностью ρ.
Теория массового обслуживания, не?31 января 2017 в 08:11 (комментарий был изменён)
+1↑
↓
По моему мнению, на несколько полос пробки возникают из-за следующих причин:
1. Крайняя полоса занята под стоянку автомобилей. Закон о парковке по чётным дням слева, по нечётным справа.
2. Аварии — спонсировать гибдд?
3. Логистика, переходы, светофоры.
4. Самое главное, лихачи, которые перестраиваются из ряда в ряд ради мизерных выгод. Из-за них тормозит весь поток.
Вот лихачей бы в формулу включить. kefirfromperm
kefirfromperm
31 января 2017 в 08:13
0↑
↓
Пробки, конечно, будут. Если 2 полосы сливаются в одну, то скорость на них будет как минимум в два раза меньше, чем максимально допустимая на одной после слияния. И роботы как раз могут обеспечить максимальное приближение к 2 м, а люди будут постоянно спорить и лезть вперед за счет чего замедляют обе полосы не в 2, а в несколько раз.31 января 2017 в 09:53 (комментарий был изменён)
0↑
↓
Вся математика разобьется об банальные вещи — ни разу не видел обсуждения как робомобили будут ездить зимой. Когда дорогу надо чувствовать своим задним мостом, т.е. пятой точкой. Где гарантия, что в программах будут учтены все дорожные условия?31 января 2017 в 10:17
+2↑
↓
Считаете, что разработчики роботов не знают, что такое зима? Это было бы странно.
В плане опыта роботы будут иметь преимущество — можно собирать данные с миллионов машин.
Решения при неожиданных событиях поначалу будут хуже, но и люди с этим не всегда успешно справляются.31 января 2017 в 10:51 (комментарий был изменён)
0↑
↓
разработчики может и знают, но и я знаю людей и слышал от других, как их знакомых разворачивало на трассе (к счастью все обходилось только помятым железом), когда компьютер вдруг решал, что надо подключить задние колеса.31 января 2017 в 10:59
0↑
↓
Нет сети и алгоритма обучения. Когда будут — это будут случаи из разряда фантастики. Хотя я за предсказуемость, пока, нежели за обучаемость. Пока на дорогах не станет роботов >> людей.
31 января 2017 в 10:20
0↑
↓
, а еще весной надо объезжать ямы в лужах.-
kefirfromperm
31 января 2017 в 10:24
+2↑
↓
У роботов здесь очевидное преимущество. Если человек, каким-то загадочным способом должен «чувствовать своим задним мостом», то робот точно знает коэффициент сцепления с дорогой. Более того, имея инфракрасные камеры и камеры с поляризацией света, робот может видеть скользкие участки и лужи под снегом, что для человека невозможно.
