Американский программист сделал прототип робота для уборки мусора
вчера в 21:14

Программист по профессии, и любитель робототехники по жизни, пользователь сайта HackADay под ником BDM разместил на ресурсе описание своего проекта — автоматический сборщик мусора «Lazy Cleaner 9000».
Сборщик собран на базе детского электромобиля, использует Raspberry Pi для работы софта, камеру Rasp. Pi NOIR cam для съёмки и получения картинки, которую затем обрабатывает алгоритм распознавания образов.
После того, как алгоритм определяет предметы, отличающиеся по цвету от фона (например, лужайки), автомобильчик перемещается в удобную позицию, роботизированная рука (изготовленная энтузиастом самостоятельно) при помощи контроллера и нескольких моторов передвигается и поднимает мусор с земли.
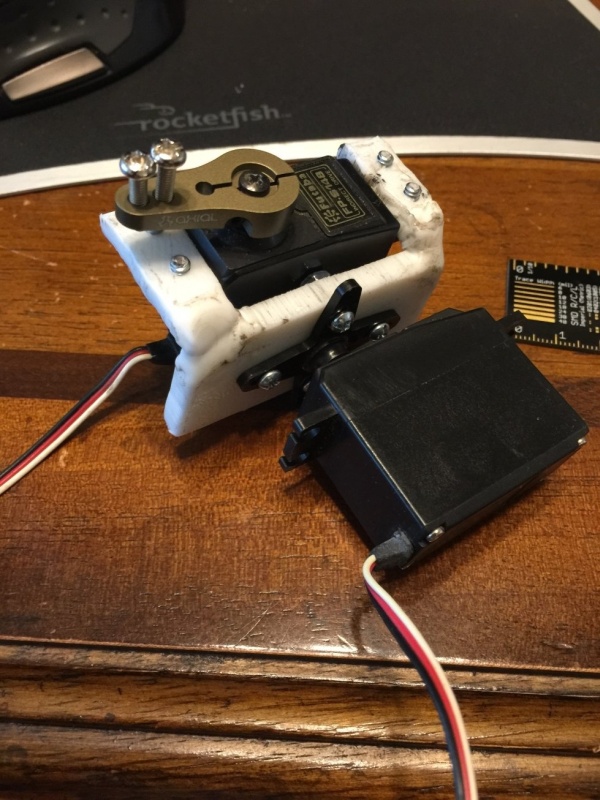
Проект пока находится на стадии разработки, так что автор ещё не придумал, куда можно будет приспособить ёмкость для сбора мусора. Кроме того, работа и конструкция роборуки явно требуют доработки. В планах автора — сделать датчик наполнения ёмкости мусора, добавить подсветку, GPS-приёмник и возможность передавать координаты места нахождения LZ9000.
Автор мечтает, что подобные роботы могли бы без устали убирать мусор с пляжей, обочин дорог и парков. Подробности проекта и исходники алгоритмов можно найти на странице проекта.
