Адаптация видео к форме экрана с частотой 1000 кадров/с

Видео проецируется на движущийся лист бумаги (слева) и на деформирующуюся ткань майки
Все видели обычный цифровой проектор, который проецирует видео на плоскую белую поверхность — на экран. Желательно в темноте. Требования к экрану очень строгие: от его качества во многом зависит красота картинки. Но представьте, что проектор может проецировать видео не только на ровную поверхность, но на ткань любой формы, да ещё и движущуюся! Такую невероятную технологию разработали сотрудники лаборатории Исикава Ватанабе из Токийского университета.
По мнению японских инженеров, технологическое совершенствование проекторов замерло на месте. А ведь это важная технология, которая расширяет, дополняет реальный мир. Теоретически, проецируемые картинки и видеоролики могут быть очень полезны в разных сферах дополненной реальности: от индустрии развлечений до информационных цифровых помощников, которые отображают контекстную информацию в удобном месте, на стекле очков, шлеме или просто на шторе в комнате.
Большинство современных технологий проецирования изображений ограничены статичными поверхностями. Это значительно область их применения.
Инженеры из лаборатории Исикава Ватанабе решили снять это ограничение, сделав проекторы более приспособленными к динамичному окружающему миру, в котором реальность постоянно меняет форму и трансформируется. В дополненной реальности будущего виртуальные объекты и реальный мир сольются в единую органичную форму, отлично приспособленную для человеческого зрения. В идеале, мы не должны различать между собой надписи краской и цифровые проекции. В более отдалённом будущем и трёхмерные динамичные «живые» объекты не должны сильно отличаться от настоящих предметов реального физического мира.
Что нужно для того, чтобы воплотить эту идею в жизнь? В первую очередь, требуется высокоскоростной проектор с исключительно высоким показателем количества кадров в секунду и низкой задержкой. Именно с такими требованиями в уме был разработан проектор DynaFlash, который проецирует 8-битные изображения с частотой кадров 1000 кадров/с и задержкой всего 3 миллисекунды.

Цифровой проектор DynaFlash
Японцы не ищут лёгких путей. Они не остановились на создании высокоскоростного проектора, а пошли дальше — и придумали, как заставить его искажать изображение в соответствии с деформациями гибкой ткани практически в реальном времени. Зачем? Например, чтобы проектор мог проецировать видеоролики без искажений на движущиеся объекты. Например, на майку человека в движении.
Как несложно догадаться, высокоскоростное проецирование осуществляется через специальный трекинг, то есть отслеживание поверхности. Это тоже неординарная задача в области компьютерного зрения. Задача отслеживания мнущихся поверхностей осложняется тем, что поверхность может частично закрывать сама себя, не говоря уже о частичном закрытии посторонними объектами.
Разумеется, отслеживание поверхности должно происходить с той же высокой скоростью, с какой работает проектор. Поэтому у технологии Deformable Dot Cluster Marker такие же технические характеристики: 1000 кадров/с и задержка 3 миллисекунды.
Как отслеживать форму поверхности с такой точностью и скоростью? В принципе, тут тоже вариантов немного. Японцы сделали это через маркерную сетку, которая наносится на объект. Дизайн маркерной сетки показан на анимированной графике.


Трекинг на высокой скорости происходит на сильно распаралеленной задаче во множестве независимых тредов. Тем не менее, даже на CPU достигается производительность 1000 кадров в секунду.
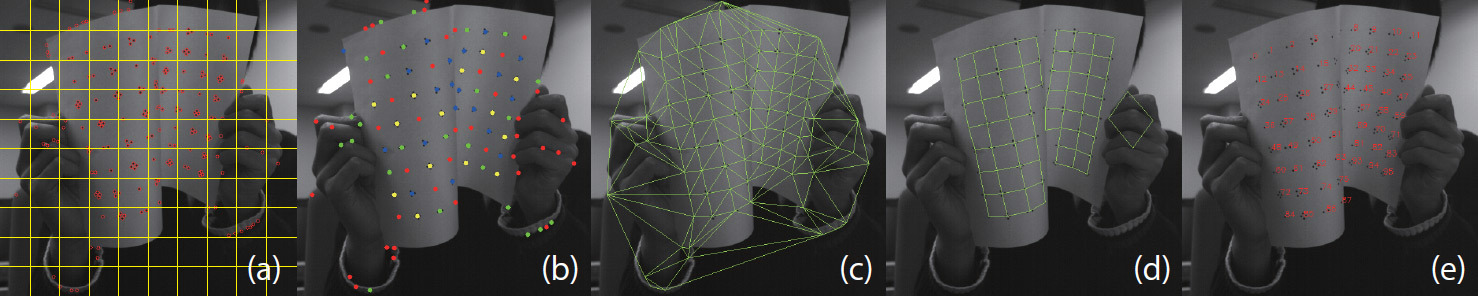
Конвейер распознавания маркерной сетки
После распознавания маркерной сетки программа быстро вычисляет необходимые векторы деформации кадров в видеоролике — и проецирует результат в реальном времени с помощью проектора DynaFlash.

Вычисление векторов в программе
В общем, по описанию система работает довольно логично и просто. Вопрос в технической реализации — как им удалось оптимизировать эту задачу машинного зрения для такой высокой производительности?
Ответ на этот вопрос можно узнать из статьи «Dynamic Projection Mapping onto Deforming Non-rigid Surface using Deformable Dot Cluster Marker», которую авторы опубликовали в журнале по машинному зрению IEEE Transactions on Visualization and Computer Graphics (doi: 10.1109/TVCG.2016.2592910). Там подробно описаны алгоритмы вычисления векторов для маркерной сетки, обновления позиций отслеженных точечных кластеров, выявления ложных срабатываний, интерполяции потерянных кластеров и т.д. Авторы пишут, что для параллелизации вычислений использовали пакет OpenMP. Распознавание программой маркерной сети и покадровое отслеживание требовали менее 2 мс и 1 мс, соответственно, в зависимости от формы искажений. В таблице результат сравнивается с другой системой DRDM, которую коллеги представили на симпозиуме IEEE в 2011 году.

Авторы уверены, что органичность дополненной реальности на объектах реального мира — важное условие для цельности впечатлений от синтетической реальности такого рода. Здесь не должно быть высокой задержки в проецировании видео и геометрических искажений.
Ребята из лаборатории Исикава Ватанабе давно известны своими необычными и интересными изобретениями. Например, в 2013 году они изобрели высокоскоростной проектор Lumipen, который проецирует видео на движущиеся объекты.
Такая технология может найти применение в играх дополненной реальности, где человек в реальности взаимодействует с виртуальными объектами, будь то покеболл или футбольный мяч.
Проецирование виртуальной реальности на объекты реального мира широко используется в парках аттракционов по всему миру. Его можно применять в компьютерных интерфейсах, прототипировании, в обучении с учителем (например, в обучении вождению автомобиля) и многих других областях.
