7. Точность систем автоматического регулирования (ч. 2)
7.4 Точность по возмущающему воздействию
Рассмотрим замкнутую САР, на которую может воздействовать возмущающее входное воздействие.
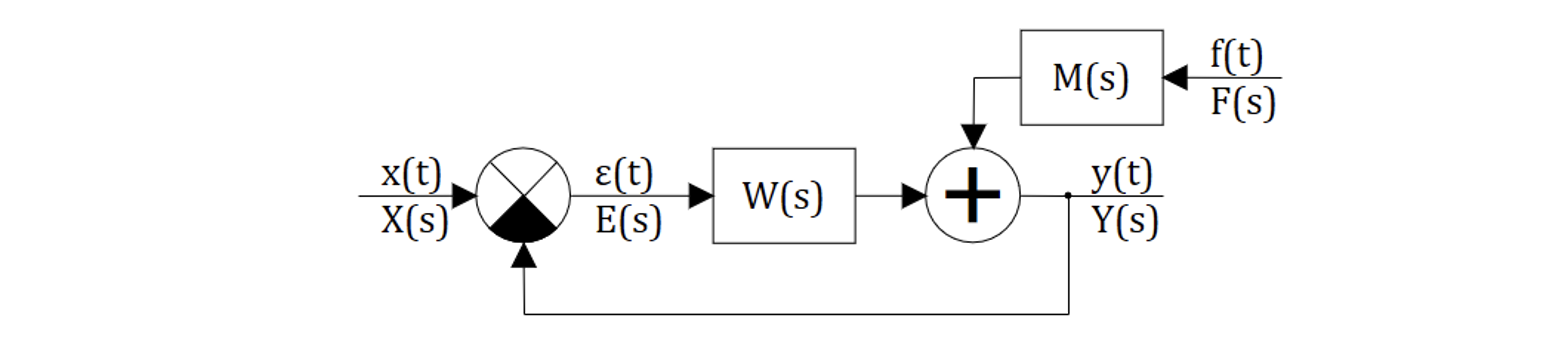
Рисунок 7.4.1 Схема САР с возмущающим воздействие
Предположим, что  , т.е. управляющее воздействие отсутствует. В этом случае САР обязана поддерживать на выходе
, т.е. управляющее воздействие отсутствует. В этом случае САР обязана поддерживать на выходе  (с некоторой степенью точности)
(с некоторой степенью точности)
В этом случае  , поэтому поэтому установившуюся ошибку
, поэтому поэтому установившуюся ошибку можно вычислить как:
можно вычислить как:

Используя передаточную функцию замкнутой САР по возмущающему воздействию  , имеем:
, имеем:

7.4.1 Ступенчатое возмущающее воздействие
Пусть ступенчатое возмущение 
Передаточная функция  равна:
равна:


Анализ соотношения (7.4.3) показывает, что:
— если САР — статическая (т.е. полином  имеет свободный член, равный 1), то:
имеет свободный член, равный 1), то:

— если САР — астатическая (степень астатизьма  ), то:
), то:

Графическая иллюстрация переходного процесса:
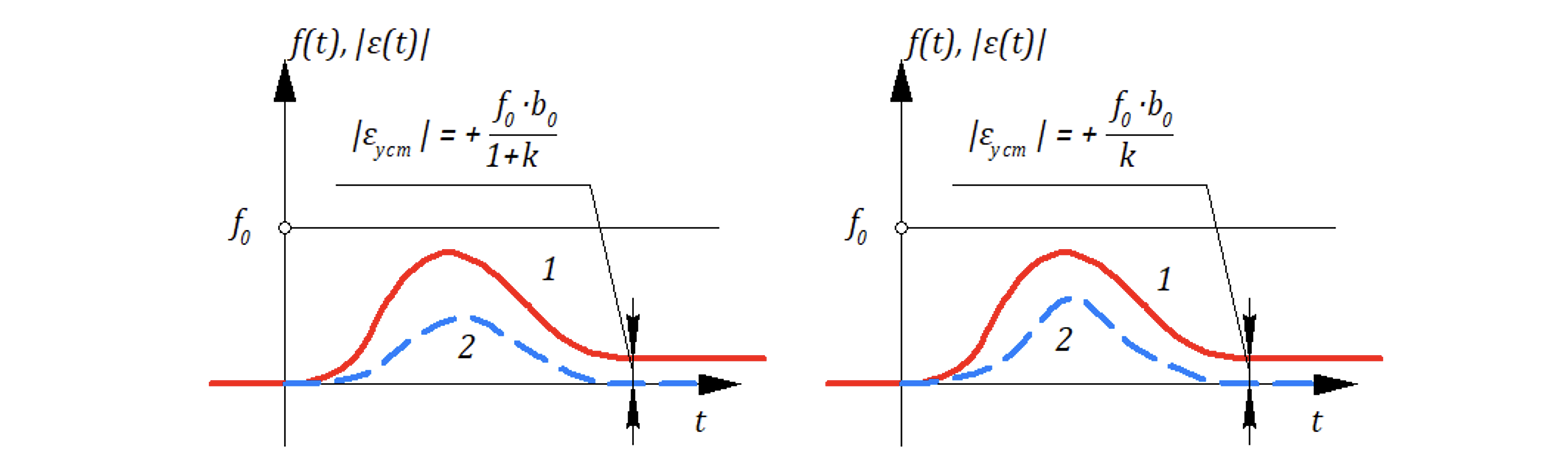
Рисунок 7.4.2 Переходной процесс при ступенчатом возмущающем воздействии
Кривые 1 на рисунках соответствуют случаям, когда полином  имеет свободный член, равный
имеет свободный член, равный  (причем для данных рисунков
(причем для данных рисунков  не имеет свободного члена.
не имеет свободного члена.
Случай, когда полином  не имеет свободного члена принято называть астатизмом по возмущающему воздействию.
не имеет свободного члена принято называть астатизмом по возмущающему воздействию.
7.4.2 Линейное возмущающее воздействие
Пусть возмущающее воздействие  перейдем в изображение
перейдем в изображение 
Подстановка в формулу (7.4.2) показывает, что если САР не имеет астатизма по возмущающему воздействию, то:

Если САР имеет астатизма по возмущающему воздействию  , то
, то  .
.
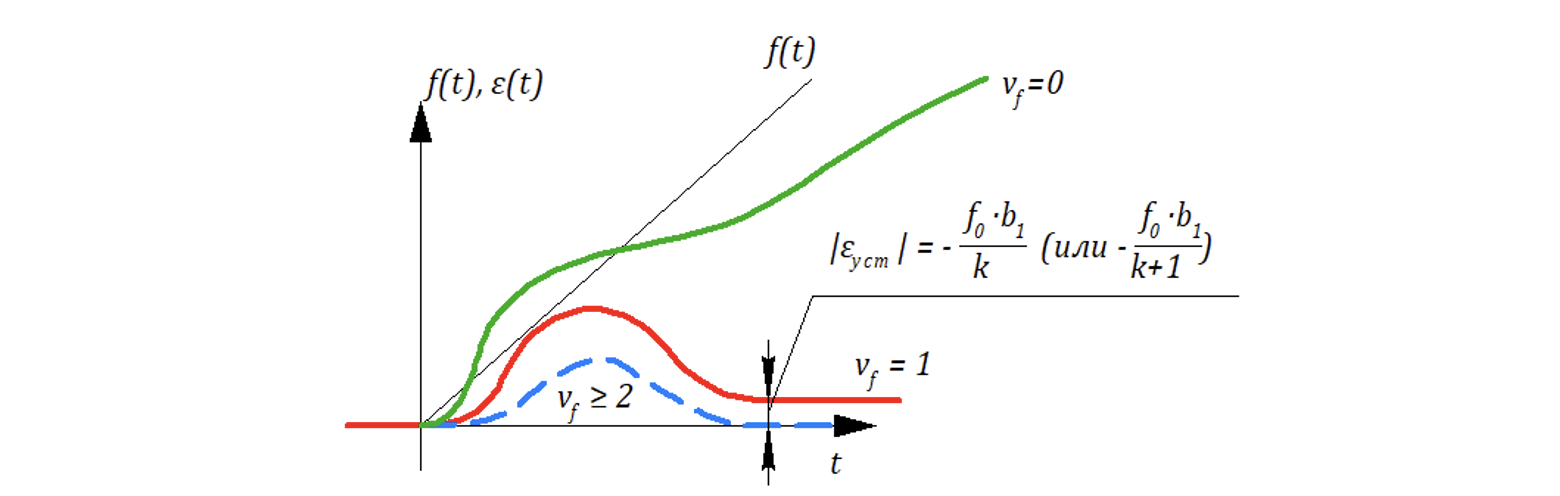
Рисунок 7.4.3 Переходной процесс при линейном возмущающем воздействии
В завершении обсуждения рассмотренных подразделов сделаем некоторые заключающие выводы:
Система автоматического регулирования называется астатической по управляющему воздействию, если при воздействии, стремящемся к установившемуся значению ошибка (рассогласование) стремится к нулю независимо от величины управляющего воздействия.
Система автоматического регулирования называется астатической по возмущающему воздействию, если при его приложении ошибка (рассогласование) стремится к некоторому установившемуся значению, зависящему от величины установившегося значения возмущающего воздействия.
Хорошей практикой при проектировании САР является придание ей свойства астатизма как по управляющему воздействию  , так и по возмущающему воздействию
, так и по возмущающему воздействию  .
.
Анализ подраздела (7.3) показывает, что астатизм по управляющему воздействию обеспечивается за счет астатических регуляторов (структура которого содержит интегрирующие звенья) — например ПИ-регуляторов.
Наряду со статическими и астатическими САР различают статические и астатические регуляторы.
Статический регулятор при ступенчатом управляющем воздействии на его входе обеспечивает на выходе (регулятора) асимптотически-устанавливающиеся значения.
У астатических регуляторов при ступенчатом входном сигнале выходной сигнал (регулятора) линейно (или нелинейно) нарастает без ограничений по уровню.
Пример
Определить установившиеся ошибки по управляющему и возмущающему воздействиям, если  и
и  для следующей САР:
для следующей САР:
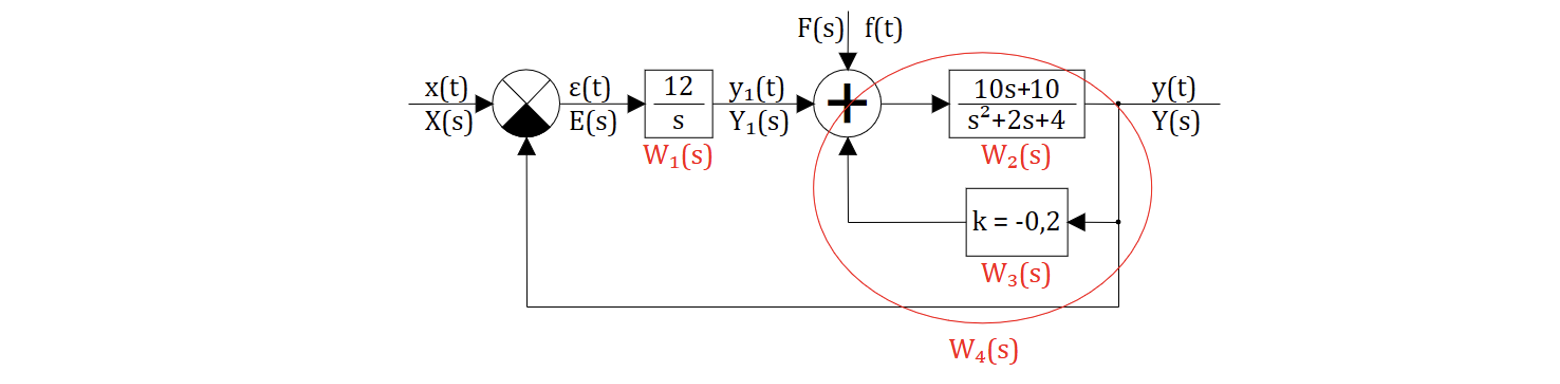
Рисунок 7.4.4 Схема САР для анализа
Найдем
 по управляющему воздействию, выполним преобразования к общей передаточной функции.
по управляющему воздействию, выполним преобразования к общей передаточной функции.![W_4=\frac{W_2}{1-W_2\cdot W_3}=\frac{10\cdot(s+1)}{(s^2+2\cdot s+4)\cdot \left[1+\frac{10\cdot(s+1)}{s^2+2\cdot s+4}\cdot0.2\right ]}\Rightarrow](https://habrastorage.org/getpro/habr/upload_files/5d2/b61/7b1/5d2b617b117be882ef0dc9873ef87795.svg)

Передаточная функция разомкнутой САР 


Рисунок 7.4.5 Эквивалентная САР по управляющему воздействию
Легко видеть, что данная САР устойчива
Т.к. система астатична по управляющему воздействию, то 
Найдем  . Преобразуем к свободным членам, равным единице:
. Преобразуем к свободным членам, равным единице:
![\lim_{s\rightarrow0}W_{экв}(s)=\lim_{s\rightarrow0}\frac{120\cdot(s+1)}{6\cdot s\cdot \left [ \frac{1}{6}\cdot s^2+\frac{2}{3}\cdot s+1 \right ]}=20\Rightarrow k=20](https://habrastorage.org/getpro/habr/upload_files/f34/473/d97/f34473d97f7096c168969a166b367b52.svg)

Найдем
 — установившуюся ошибку по возмущающему воздействию.
— установившуюся ошибку по возмущающему воздействию.Используя замену цепи с местной обратной связью
 , получаем следующую структурную схему:
, получаем следующую структурную схему: 
Рисунок 7.4.6 Эквивалентная САР по возмущему воздействию
Найдем передаточную функцию по возмущающему воздействию (для замкнутой САР):
![\Phi_f(s)=\frac{Y(s)}{F(s)}\Rightarrow Y(s)=W_4(s)\cdot[F(s)+Y_1(s)]=W_4(s)\cdot[F(s)+E(s)\cdot W_1(s)]=](https://habrastorage.org/getpro/habr/upload_files/e82/a91/42a/e82a9142a65ed631bab3d562b76d1b6e.svg)

![\left[1+W_1(s)\cdot W_4(s) \right]\cdot Y(s)=W_4(s)\cdot F(s)](https://habrastorage.org/getpro/habr/upload_files/bd5/2ae/8cd/bd52ae8cd469eca0d13dbe282bdfea8f.svg)
![\Phi_f(s)=\frac{Y(s)}{F(s)}=\frac{W_4(s)}{1+W_1(s)\cdot W_4(s)}=\frac{10\cdot(s+1)}{(s^2+4\cdot s+6)\cdot \left [ 1+\frac{12}{s}\cdot \frac{10 \cdot (s+1)}{s^2+4\cdot s+6}\right ] }](https://habrastorage.org/getpro/habr/upload_files/170/67e/4cb/17067e4cbb8a445baa994824de0a043b.svg)

Замечаем, что САР астатична по возмущающему воздействию, т.к. числитель не имеет свободного члена.
Используя первую предельную теорему:


7.5 Установившаяся ошибка при медленно изменяющемся произвольном воздействии (коэффициенты ошибок)
Сначала прокомментируем название данного раздела:
1. произвольное воздействие — форма воздействия не соответствует любому типовому воздействию:

Рисунок 7.5.1 Произвольное воздействие
Причем закон изменения  — не известен.
— не известен.
2. Медленно изменяющееся — подразумевает, что скорость протекания собственной части переходного процесса намного больше (т.е. характерная постоянная времени существенно меньше), чем скорость (относительная) изменения входного воздействия. Например, если  , где
, где  — период разгона, причем
— период разгона, причем  — например, время переходного процесса при подаче на вход САР ступенчатого воздействия.
— например, время переходного процесса при подаче на вход САР ступенчатого воздействия.

Рисунок 7.5.2. Схема эквивалентный САР
Поскольку входное (управляющее) воздействие и непосредственно САР имеют значительно различающиеся постоянные времени, в первом приближении можно считать, что САР почти без инерции «отслеживает» управляющее воздействие, т.е. рассогласование  можно считать приблизительно «установившимся»:
можно считать приблизительно «установившимся»:

По аналогии с предыдущими подразделами:

Учитывая, что  , используем обратное преобразование Лапласа:
, используем обратное преобразование Лапласа:
![\varepsilon_{уст}=\lim_{t\rightarrow\infty}[w_\varepsilon(t)\cdot x(t)] \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \mathbf{(7.5.2)}](https://habrastorage.org/getpro/habr/upload_files/3b3/6cb/0f6/3b36cb0f632fb1efccb9e3af7de2ade2.svg)
где  — весовая функция замкнутой САР для ошибки;
— весовая функция замкнутой САР для ошибки;  — свертка.
— свертка.
Раскрывая свертку с помощью интеграла Дюамеля-Карсона (смотри раздел 2.9), получаем:

Если  — отрицателен, следовательно
— отрицателен, следовательно 
Разложим  в ряд Тейлора:
в ряд Тейлора:

Напомним сведения из математики:
Если  — действительная функция, имеющая на интервале
— действительная функция, имеющая на интервале  n-ю производную, то значение функции можно расчитать по выражению:
n-ю производную, то значение функции можно расчитать по выражению:

В нашем случае в качестве переменной  выступает
выступает  ; в качестве
; в качестве  — время
— время  ; в качестве
; в качестве  — переменная
— переменная  .
.
Подставляя выражение (7.5.4) в соотношение (7.5.3), получаем:
![\varepsilon_{уст}=\int_0^\infty x(t)\cdot w_\varepsilon(\tau)\cdot d\tau+\int_0^\infty[-\tau\cdot x'(t)]\cdot w_\varepsilon(\tau)\cdot d\tau+\\+\int_0^\infty\left [\frac{1}{2!}\cdot\tau^2 \cdot x''(t) \right ]\cdot w_\varepsilon(\tau)\cdot d\tau +...\Rightarrow](https://habrastorage.org/getpro/habr/upload_files/666/890/b47/666890b47cfc965cc386fea26954b833.svg)

где:


Коэффициенты  — называются коэффициентами ошибок.
— называются коэффициентами ошибок.
Если аналитическое выражение  — известно, то «нетрудно» рассчитать
— известно, то «нетрудно» рассчитать  и, соответственно, рассчитать значения коэффициентов ошибок
и, соответственно, рассчитать значения коэффициентов ошибок  по выше приведенным интегралам.
по выше приведенным интегралам.
Если известна экспериментально-определенная весовая  (или переходная
(или переходная  ), то расчет коэффициентов ошибок тоже не представляет проблем.
), то расчет коэффициентов ошибок тоже не представляет проблем.
Второй способ определения установившейся ошибки при произвольном воздействии, отталкиваясь от формулы  , разложим
, разложим  в ряд Тейлора (а точнее в ряд Маклорена):
в ряд Тейлора (а точнее в ряд Маклорена):
![\Phi_\varepsilon(s)=\Phi_\varepsilon(0)+\frac{1}{1!}\left [ \frac{d\Phi_\varepsilon(s)}{ds}\right ]_{s=0}\cdot s+\frac{1}{2!} \left [ \frac{d^2\Phi_\varepsilon(s)}{ds^2} \right ]_{s=0}\cdot s^2+\\+\frac{1}{3!}\left [\frac{d^3\Phi_\varepsilon(s)}{ds^3} \right]_{s=0}\cdot s^3+... \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \mathbf{(*)}](https://habrastorage.org/getpro/habr/upload_files/c4b/8e4/a61/c4b8e4a614fc60d96cbc90ed7e8efb5c.svg)
Подставляя последнее соотношение в формулу для рассогласования  , имеем:
, имеем:

Замечая, что оригиналы равны:


Окончательно:

где: 
Второй способ вывода явно более простой.
Коэффициенты ошибок могут быть определены и путем деления полиномф числителя  на полином знаменателя и сравнением полученного ряда с выражением (*).
на полином знаменателя и сравнением полученного ряда с выражением (*).
Для систем с различным порядком астатизма первые три коэффициента ошибок принимают следующие значения:
Пример 3
Найти установившуюся ошибку для САР, замкнутой единичной обратной связью, если разомкнутая САР состоит из последовательно-соединенных идеального интегрирующего звена  и апериодического звена первого порядка
и апериодического звена первого порядка  а входное управляющее воздействие
а входное управляющее воздействие  где возмущающее воздействие
где возмущающее воздействие  , где
, где  .
.

Рисунок 7.5.3 САР для анализа возмущения
Численное решение данной задачи в видео:
Аналитическое решение
Сначала рассмотрим первую часть задачи, когда возмущающее воздействие отсутствует.

Очевидно, что данная САР имеет астатизм 1-го порядка, следовательно  Тем не менее проведем эти вычисления:
Тем не менее проведем эти вычисления:

где новые переменные 
Найдем коэффициенты ошибок: 




Найдем коэффициент  :
:



Аналогичным путем можно найти  ,
,  , и т.д.
, и т.д.
Вычислим значения  и
и  подставля занчения
подставля занчения 


Пренебрегая в первом приближении составляющими высокого порядка ( ), получаем:
), получаем: 
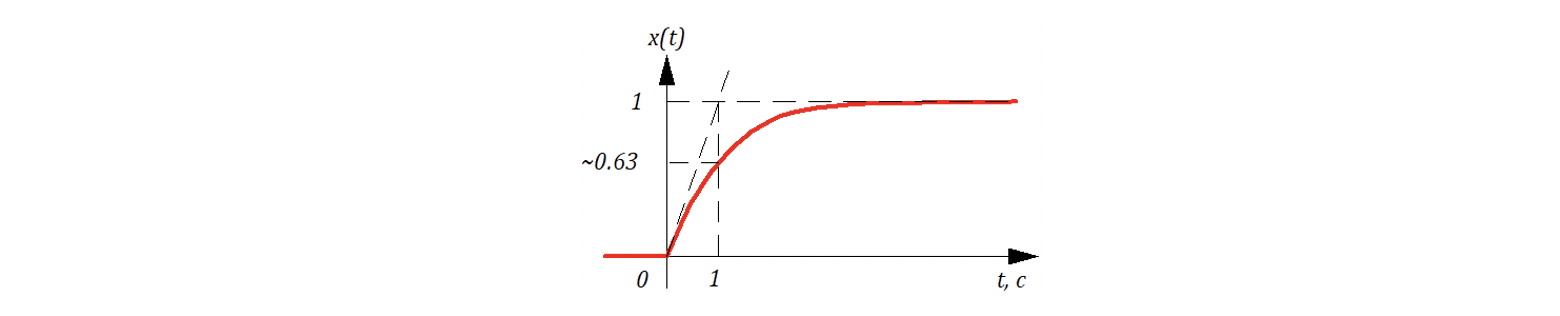
Рисунок 7.5.4 Входное воздействие
Пусть  , тогда
, тогда  подставляем в
подставляем в 

Рисунок 7.5.5 Перходной процесс и установившиеся отклонения
Если учесть член  проведя вычисления
проведя вычисления

Дифференцируя 
Анализ показывает, что учитывать члены более высокого порядка нет смысла, т.к. они очень малы.
Теперь рассмотрим 2-ю часть задачи: найдем установившиеся отклонения  при возмущающем воздействии
при возмущающем воздействии  где
где  и нулевым входным воздействием
и нулевым входным воздействием 
Найдем передаточную функцию системы для ошибки по воздействию:

![E(s)=-Y(s)=-[F(s)\cdot W_2(s)+E(s)\cdot W_1(s)\cdot W_2(s)] \Rightarrow](https://habrastorage.org/getpro/habr/upload_files/2a4/f0a/acd/2a4f0aacd90a50b768ad47883bf25b0f.svg)

где новые переменные
Найдем коэффициент ошибок:
 — это означает, что рассматриваемая САР имеет астатизм по возмущающему воздействию.
— это означает, что рассматриваемая САР имеет астатизм по возмущающему воздействию.
Найдем  :
:

Найдем  :
:

Найдем  :
:

Члены более высокого порядка не учитываем, т.к. они второго порядка малости.
 — подставляя значения
— подставляя значения 

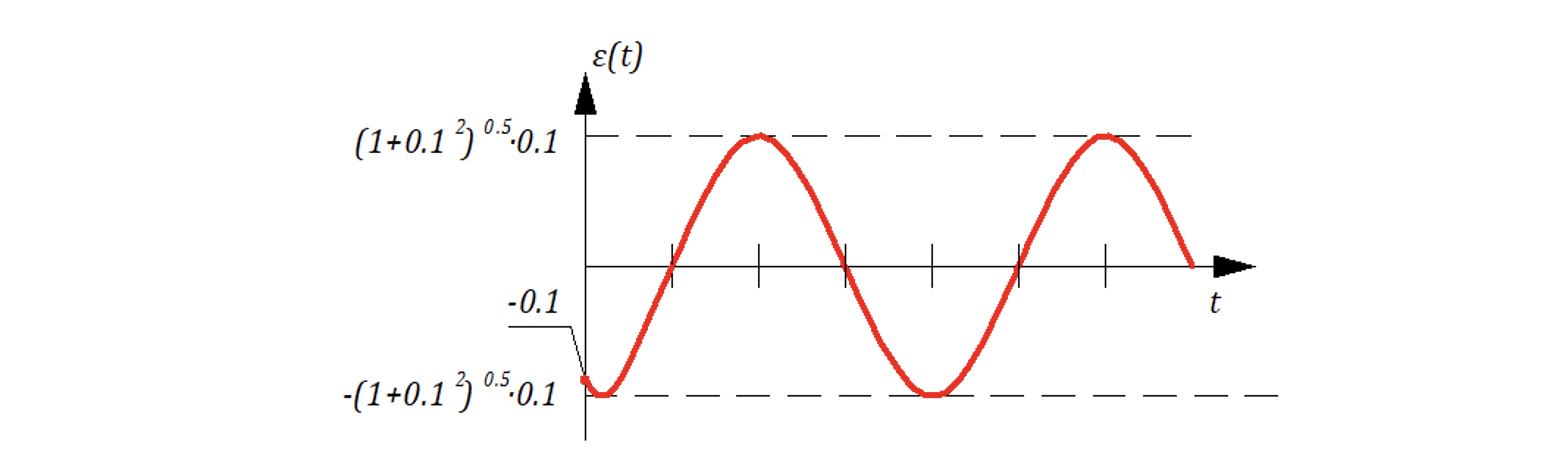
Рисунок 7.5.6. Установившиеся ошибка
В заключение пример анализа САР по возмущающему воздействию.
В предыдущих сериях:
1. Введение в теорию автоматического управления.2. Математическое описание систем автоматического управления 2.1 — 2.3, 2.3 — 2.8, 2.9 — 2.13.
3. ЧАСТОТНЫЕ ХАРАКТЕРИСТИКИ ЗВЕНЬЕВ И СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РЕГУЛИРОВАНИЯ. 3.1. Амплитудно-фазовая частотная характеристика: годограф, АФЧХ, ЛАХ, ФЧХ. 3.2. Типовые звенья систем автоматического управления регулирования. Классификация типовых звеньев. Простейшие типовые звенья. 3.3. Апериодическое звено 1–го порядка инерционное звено. На примере входной камеры ядерного реактора. 3.4. Апериодическое звено 2-го порядка. 3.5. Колебательное звено. 3.6. Инерционно-дифференцирующее звено. 3.7. Форсирующее звено. 3.8. Инерционно-интегрирующее звено (интегрирующее звено с замедлением). 3.9. Изодромное звено (изодром). 3.10 Минимально-фазовые и не минимально-фазовые звенья. 3.11 Математическая модель кинетики нейтронов в «точечном» реакторе «нулевой» мощности.
4. Структурные преобразования систем автоматического регулирования.
5. Передаточные функции и уравнения динамики замкнутых систем автоматического регулирования (САР).
6. Устойчивость систем автоматического регулирования. 6.1 Понятие об устойчивости САР. Теорема Ляпунова. 6.2 Необходимые условия устойчивости линейных и линеаризованных САР. 6.3 Алгебраический критерий устойчивости Гурвица. 6.4 Частотный критерий устойчивости Михайлова. 6.5 Критерий Найквиста.
Точность систем автоматического управления (ч.1)
