50 оттенков ПНЯ* АЦП и АЦП с вычислителем микроконтроллеров Microchip
- ПНЯ — Периферия Независимая от Ядра в микроконтроллерах Microchip, известная так же как CIP — Core Independent Peripheral.
Предыдущие статьи [1] и [2] были посвящены таким частям (ПНЯ) Периферии Независимой от Ядра микроконтроллеров (МК) Microchip как конфигурируемым логическим ячейкам и портам ввода/вывода с новой полезной функцией ограничения тока.
Сейчас рассмотрим Аналого-Цифровой Преобразователь (АЦП) и в особенности новый АЦП с поствычислителем. Как вы наверное уже привыкли новые особенности периферии могут помочь в реализации специфических функций и упростить код под PIC микроконтроллеры.
В отличие от предыдущих частей, в этой будет чуть больше теории и чуть меньше примеров.
- Обзор возможностей АЦП
- Триггер запуска
- УВХ, CVD, Двойное преобразование
- Поствычислитель, фильтрация, усреднение
- Примеры конфигурирования
- Автозапуск, фильтрация
- Автозапуск, CVD, усреднение, прерывание по сравнению с порогами
- Автозапуск, дифференциальный CVD, серия преобразований, усреднение
- Итоги
АЦП с полной уверенностью можно назвать Периферией Независимой от Ядра, так как АЦП имеет вариант тактирования от встроенного RC-генератора и может выполнять преобразование в режиме сохранения энергии Sleep. Но этим независимость не ограничивается. Многие семейства PIC16F1xxx имеют АЦП с возможностью старта по событиям, а совсем новые семейства PIC16F188xx получили еще и поствычислитель.
Рассмотрим возможности АЦП на примере МК семейства PIC16F18855/75
АЦП контроллеров этого семейства имеет:
- 8-и битный таймер предвыборки (Acquisition Timer)
- Аппаратную поддержку Емкостного делителя напряжения (Capacitive Voltage Divider, CVD):
- 8-и разрядный таймер предзаряда
- Массив конденсаторов подстройки емкости УВХ
- Выходной драйвер защитного кольца (Guard ring)
- Автоматическое повторение операций и последовательностей (Automatic repeat and sequencing):
- автоматизированное двойное преобразование для CVD
- Два набора регистров результата (результат и предыдущий результат)
- Триггер автопреобразования
- Внутренний «ретриггер» (Internal retrigger)
- Возможности вычислителя:
- Усреднение и Фильтр Низких Частот
- Сравнение с опорным значением
- 2-х уровневое пороговое сравнение
- Выбираемые прерывания
АЦП с поствычислителем состоит из нескольких блоков (рис. 1):

Рис. 1. Структура АЦП с вычислителем в семействе PIC16F18855.
Триггер запуска АЦП
Прошли те времена, когда для запуска измерения АЦП нужно было «вручную» установить бит. Теперь АЦП может запускаться ещё по следующим событиям:
- внешний вход;
- срабатывание таймеров (общего назначения и SMT — 24-х битных таймеров измерения сигналов);
- выход модуля сравнения и ШИМ;
- срабатывание компаратора;
- изменение состояния входов настроенных как прерывание по изменению состояния;
- выход логических ячеек;
- чтение результата измерения АЦП;
- изменение номера канала АЦП.
УВХ и CVD
Устройство выборки/хранения (УВХ) получило дополнительные возможности, в основном связанные с упрощением определения емкости подключенной ко входу АЦП. В первую очередь это помогает в создании интерфейсов с емкостными (сенсорными) кнопками.
Microchip предлагает определять емкость сенсора с помощью емкостного делителя напряжения (Capacitive Voltage Divider, CVD).
Суть метода сводится к следующему. На первом шаге (см.рис. 2) вход сенсора подключается к «земле» (его емкость разряжается), а канал АЦП к напряжению питания, емкость УВХ заряжается.
Затем вход сенсора подключается к УВХ АЦП, происходит перераспределения заряда между емкостью сенсора и емкостью УВХ. Затем производится измерение напряжения на емкости УВХ.
| управление входом при CVD | форма сигналов CVD |
|---|---|
 |
 |
Рис. 2. Диаграммы поясняющие измерение емкости с помощью емкостного делителя напряжения.
При касании сенсора будет изменяться его емкость, а значит мы будем фиксировать разные установившиеся значения напряжения на емкости УВХ.
Для уменьшения влияния наведенных помех на сенсор и/или оператора, применяется дифференциальный CVD, состоящий из двух последовательных измерений с помощью CVD, но на второй стадии инвертируем заряды на сенсоре и УВХ (сенсор заряжаем до напряжения питания, а емкость УВХ разряжаем, см. рис. 3).

Рис. 3. Диаграмма сигналов при дифференциальном CVD.
Подробно про емкостные сенсоры, метод дифференциального CVD и управление защитным проводником можно почитать по ссылке [2].
Новый АЦП с поствычислителем для поддержки и автоматизации CVD имеет следующие функции:
- таймер предзаряда (precharge)
- управление последовательностью заряда (нужной полярности), запуск измерения;
- подключение дополнительных внутренних емкостей к УВХ;
- два последовательных измерения;
- вычисление разницы между двумя измеренными значениями;
- управление драйвером «защитным кольцом» (guard ring).
Таким образом, АЦП в автоматическом режиме может выполнить дифференциальный CVD и предоставить нам готовый результат.
Функции поствычислителя
Поствычислитель осуществляет несколько функций.
Фильтрация
Модуль АЦП может работать в одном из пяти режимов:
Базовый режим. В этом режиме АЦП может производить одно или два измерения, после каждого может выставляться флаг прерывания.
Накопление. По каждому измерению результат суммируется с аккумулятором и инкрементируется счетчик измерений.
Усреднение. По каждому измерению результат суммируется с аккумулятором и инкрементируется счетчик измерений. По достижению заданного числа повторений результат делится и попадает в модуль сравнения, а следующее измерение сбросит счетчик в 1 и значение аккумулятора замениться на результат первого измерения.
Усреднение очередью. По запуску АЦП происходит очистка аккумулятора и счетчика измерений и производится серия измерений заданное число раз, после чего результат делится и поступает в модуль сравнения.
Фильтр Нижних частот. Каждое измеренное значение проходит через ФНЧ. По завершению заданного числа измерений результат попадает в модуль сравнения.
Вычисление ошибки
По завершению каждого вычисления результат фиксируется до окончания следующего измерения. Так же вычисляется разница между:
- текущим и предыдущим измерением (первая производная от одиночного измерения);
- двумя результатами в режиме измерения CVD (вычисляется дифференциальный CVD);
- текущим результатом и константой (setpoint);
- текущим результатом и фильтрованным значением;
- текущим и предыдущим фильтрованными значениями (первая производная фильтрованного результата);
- фильтрованным значением и константой (setpoint).
Если вычислять разницу не нужно, то можно выбрать вычисление разницы между константой равной нулю.
Сравнение с пороговыми значениями
Результат вычисления ошибки сравнивается с верхним и нижним порогом. Дополнительно может формироваться прерывание если:
- ошибка меньше чем нижний порог;
- ошибка больше или равна нижнему порогу;
- ошибка лежит между порогами;
- ошибка за пределами порогов;
- ошибка меньше или равна верхнему порогу;
- ошибка больше верхнего порога;
- формирование прерывания вне зависимости от результата сравнения с порогами (этот режим может быть полезен для фиксации самого факта сравнения, т.е. когда, например, нужно получить данные фильтрации/усреднения после N-измерений, а не прерывание после каждого измерения).
Примеры конфигурирования АЦП
Автозапуск, Фильтрация
Данный пример показывает конфигурацию АЦП в плагине Mplab Code Configurator (MCC) для выполнения следующих действий:
- таймер Timer2 настроен на срабатывание раз в 1 мс;
- АЦП запускается по срабатыванию таймера. АЦП осуществляет предвыборку и измерение, результат попадает в фильтр. После накопления 32-х фильтрованных измерений производится сдвиг на 5 бит (деление на 32) и выставляется запрос на прерывание.
Программе нужно лишь по прерыванию считать из регистра полученное фильтрованное значение.

Рис. 4. Настройки АЦП с вычислителем.

Рис. 5. Считывание «сырых» и фильтрованных данных с АЦП.
Автозапуск, CVD, усреднение, прерывание по сравнению с порогами
За основу этого примера взята реализация «быстрое создание емкостного сенсора» из microchip.wikidot.com [5].
Выбрана следующая конфигурация:
- таймер Timer2 настроен на срабатывание раз в 10 мс
- АЦП запускается по срабатыванию таймера Timer 2. АЦП производит измерения методом CVD и вычисляет среднее значение 32-х измерений. После выполнения 32-х измерений и накопления результата выполняется деление на 32 (сдвиг на 5) и если итоговое значение лежит вне пороговых значений, то формируется запрос на прерывание, таким образом сообщается о «касании» и «отпускании» сенсорной кнопки (на самом деле в данном примере прерывание формируется каждый раз, так как кнопка либо нажата, либо нет и не имеет промежуточных состояний))

Рис. 6. Настройки АЦП для CVD.
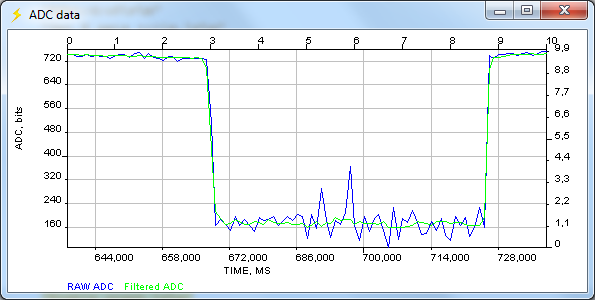
Рис. 7. Реакция на касание сенсорной кнопки при одиночном CVD.
Настройка порога нам может дать прерывание не по каждому измерению/серии измерений с фильтрацией, а по касанию «кнопки».
Автозапуск, дифференциальный CVD, серия преобразований, усреднение
В данном примере используется следующая конфигурация периферии:
- таймер Timer2 настроен на срабатывание раз в 10 мс
- АЦП запускается по срабатыванию таймера (см.рис 8, п.1). АЦП производит последовательные измерения методом дифференциального CVD (п.2) с изменением полярности (п.3), вычисляет производную (разницу между 2-я CVD) (п.4), АЦП настроен на вычисление среднего значения (п.5) 32-х измерений (п.6). После выполнения 32-х пар измерений и накопления результата выполняется деление на 32 (п.7) и запрос на прерывание (п.8), последовательные измерения останавливаются (п.9) до следующего срабатывания триггера запуска (Timer2)
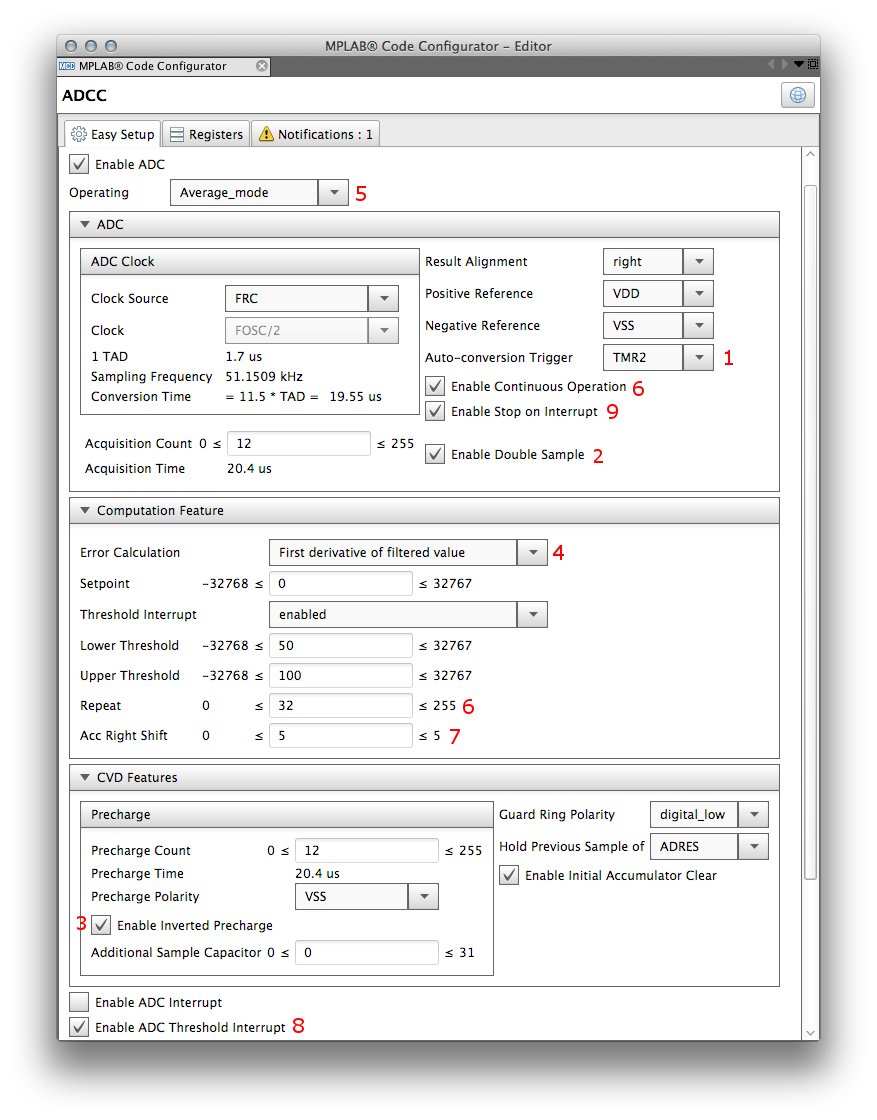
Рис. 8. Настройки АЦП для варианта дифференциального CVD.

Рис. 9, Диаграмма на входе сенсора с дифференциальным CVD
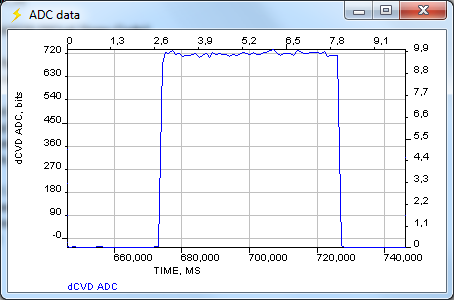
Рис. 10. Реакция на касание сенсорной кнопки при дифференциальном CVD
Из сравнения CVD (рис. 7) и дифференциального CVD (рис. 10) видно, что второй отличается более «чистым» сигналом с большей амплитудой.
Вся описанная последовательность действий выполняется полностью автоматически и независимо от ядра — в это время МК может выполнять какие-то другие действия или находиться в режиме микропотребления Sleep. По прерыванию остается считать усредненное значение результата измерений.
Итоги
Мы рассмотрели еще одну часть Периферии Независимой от Ядра — АЦП с вычислителем в микроконтроллерах Microchip. Некоторые возможности, например запуск по триггеру, или CVD присутствуют во многих семействах PIC16F1xxx, но новая «фича» — ADCC (АЦП с вычислителем), появилась в семействе PIC16F188xx (PIC16F18855 и др.).
Периферия независимая от ядра интересна сама по себе, но наибольшую пользу может принести возможность синтеза функциональных блоков, т.е. совместное использование нескольких периферийных модулей для решения конкретных задач. В этом случае тактовая частота, быстродействие и разрядность ядра уходят на второй план — аппаратная часть выполняет специализированные функции, а ядро занимается программной поддержкой изделия.
P.S.
Вопрос к читателям. Стоит ли выкладывать исходники к примерам под какую-то конкретную (дешевую) демо-плату или из описаний и так все понятно и примеры кода не нужны?
Литература:
- Конфигурируемые Логические Ячейки в PIC контроллерах
- 50 оттенков ПНЯ. Порты ввода/вывода
- Технология mTouch™. Создание емкостных клавиатур, сенсоров и экранов.
- PIC16(L)F18855/75 Data Sheet. www.microchip.com
