[Перевод] Основы квантовых вычислений: чистые и смешанные состояния
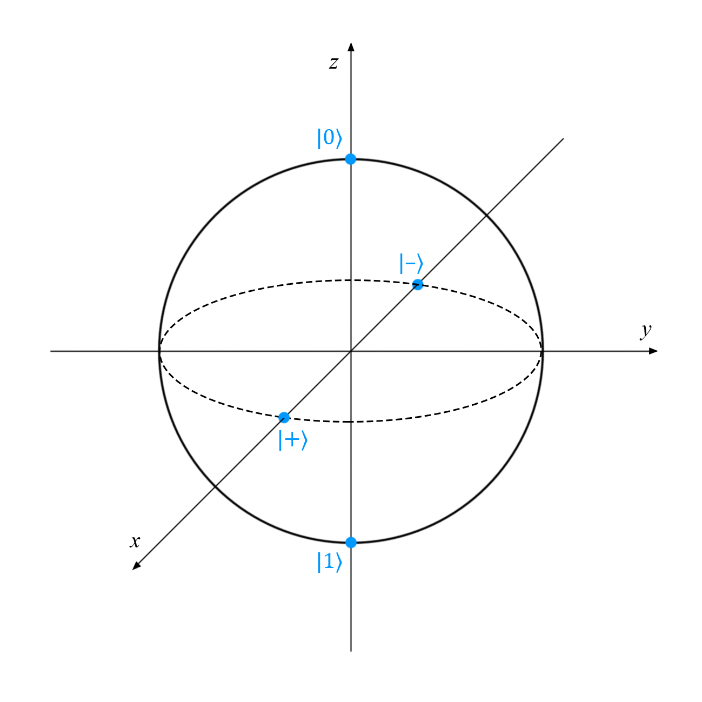
Недавно мы рассказали о способе наглядного представления однокубитных состояний — сфере Блоха. Всем чистым состояниям соответствуют точки на поверхности сферы Блоха, а смешанным — точки внутри нее. В этой публикации мы постараемся объяснить, что на самом деле представляют собой чистые и смешанные состояния.
Статьи из цикла:
- Квантовые вычисления и язык Q# для начинающих
- Введение в квантовые вычисления
- Квантовые цепи и вентили — вводный курс
- Основы квантовых вычислений: чистые и смешанные состояния
Строгое математическое объяснение приводится в книге М. Нильсена И. Чанг «Квантовая информация и квантовые вычисления», в разделе 2.4.1: «Ансамбли квантовых состояний», а также в этих замечательных конспектах (и в соответствующих записях лекций) профессора Леонарда Зюскинда из Стендфордского университета.
Чистые состояния
Чистым называется состояние, которое можно представить одним вектором состояния |ψι〉. С практической точки зрения это означает, что в любой момент времени мы точно (с вероятностью 100%) знаем, что наша система находится в состоянии |ψι〉. Другими словами, если система находится в чистом состоянии, мы обладаем полным представлением о ней и точно знаем, в каком состоянии она находится.
Примеры чистых состояний: |0〉, |1〉,  ,
,  . Им соответствуют следующие точки на поверхности сферы Блоха:
. Им соответствуют следующие точки на поверхности сферы Блоха:
Смешанные состояния
Если полного представления о том, в каком состоянии находится подготовленная система, нет, то говорят, что она находится в смешанном состоянии. Такая ситуация может быть вызвана множеством причин: например, некорректной настройкой лабораторного оборудования или спутанностью частиц с внешней системой, которая нам недоступна. Как бы то ни было, если система находится в смешанном состоянии, мы не можем быть на 100% уверены, находится ли она в чистом состоянии  или
или  либо в любом другом возможном состоянии. В таком случае состояние системы описывается вероятностным распределением всех чистых состояний, в которых она с ненулевой вероятностью может находиться после подготовки.
либо в любом другом возможном состоянии. В таком случае состояние системы описывается вероятностным распределением всех чистых состояний, в которых она с ненулевой вероятностью может находиться после подготовки.
Рассмотрим пример. Допустим, наша коллега Мэри подготовила кубиты для нашего эксперимента. Она пытается саботировать работу и не говорит нам, в каком состоянии находится каждый кубит, но мы знаем, что возможных вариантов всего три: это чистые состояния  . Поэтому наше стартовое состояние необходимо описать на языке теории вероятностей:
. Поэтому наше стартовое состояние необходимо описать на языке теории вероятностей:  . Такое сочетание чистых состояний называют смешанным состоянием.
. Такое сочетание чистых состояний называют смешанным состоянием.
Пусть мы знаем, что Мэри (например) подготавливает состояние в два раза чаще, чем или  . Мы можем использовать это знание, чтобы описать вероятности возможных состояний нашей системы к началу эксперимента. Если мы не знаем, как именно Мэри выбирает подготавливаемые состояния, то следует предположить, что все они равновероятны. И сейчас пришло время рассказать о матрице плотности (или операторе плотности).
. Мы можем использовать это знание, чтобы описать вероятности возможных состояний нашей системы к началу эксперимента. Если мы не знаем, как именно Мэри выбирает подготавливаемые состояния, то следует предположить, что все они равновероятны. И сейчас пришло время рассказать о матрице плотности (или операторе плотности).
Оператор плотности, ρ
Оператор плотности (ρ) можно использовать для представления состояния системы, начальное состояние которой не известно наверняка. Этот оператор является обобщением векторов состояния (которые используется для записи чистых состояний). Матрица плотности для чистого состояния естественным образом вырождается в вектор состояния |ψι〉. Для тех, кому это интересно, ниже приводятся некоторые математические выкладки.
Немного математики
ПРИМЕЧАНИЕ. Предполагается, что читатель владеет базовыми понятиями векторной и матричной алгебры: внешнее и внутреннее произведение, ортогональность и т. п. Для знакомства с ними рекомендуется обратиться к книге М. Нильсена и И. Чанг или к Стендфордским лекциям, которые упомянуты в начале статьи.
Оператор плотности можно определить как
Здесь:
 — вероятность того, что в начальный момент времени система находится в состоянии
— вероятность того, что в начальный момент времени система находится в состоянии  .
.- Элемент
 соответствует результату внешнего произведения вектора
соответствует результату внешнего произведения вектора  на себя (такое преобразование также называют оператором проектирования).
на себя (такое преобразование также называют оператором проектирования). - n — полное количество возможных состояний системы (в нашем примере их три).
 , как и следовало ожидать (сумма вероятностей всех возможных состояний равна 1).
, как и следовало ожидать (сумма вероятностей всех возможных состояний равна 1).
В нашем примере оператор плотности раскрывается следующим образом:
Если подставить значения вероятности из рассмотренного выше примера, получим
Это и есть матрица плотности нашей воображаемой системы! Не так уж сложно.
После того как мы вычислили оператор плотности, найти вероятность того, что измерение ρ покажет некоторое чистое квантовое состояние |ψ〉, очень просто: она равна 〈ψ|ρ|ψ〉.
В том случае, если состояние является чистым (то есть изначально система может находиться только в одном состоянии), выполняется следующее равенство:
Так мы получаем второе, эквивалентное определение чистого состояния: состояние, в котором ρ = |ψ〉〈ψ| (то есть с матрицей плотности, состоящей из единственного проектора), является чистым.
Применим оператор плотности к нашему вектору чистого состояния:
Как видите, в результате остается только |ψ〉.
По аналогии, вероятность обнаружить систему в некотором состоянии |φ〉 равна P = 〈φ|ρ|φ〉 = |〈φ|ψ〉|².
Как мы видим, правила вычисления вероятностей для смешанных состояний сводятся к правилам для чистых состояний, которые мы уже знаем. Таким образом, все правила для смешанных состояний выражаются через правила для чистых состояний, как и утверждалось ранее.
Дополнительные ресурсы
- Microsoft Quantum
- Microsoft Quantum Development Kit
- Блог Microsoft Quantum
