[Перевод] Моделирование сценариев неисправностей закрылков самолёта с помощью Wolfram SystemModeler
 Перевод поста Anneli Mossberg и Olle Isaksson «Modeling Aircraft Flap System Failure Scenarios with SystemModeler».Выражаю огромную благодарность Кириллу Гузенко за помощь в переводе.
Вы что-нибудь слышали о Boeing 747 Dreamlifter, который прилетел не к тому аэропорту и был вынужден приземляться на слишком короткую взлётно-посадочную полосу? К счастью, эта история имела счастливую развязку, и никто из пассажиров не пострадал. Тем не менее, это весьма опасная ситуация — когда фактическая посадочная дистанция (далее — ФПД) длиннее взлётно-посадочной полосы, и возникать она может не только из-за ошибки пилота, который сбился с верного пути.Одна из возможных причин такого сценария — неисправность закрылков. Закрылки — шарнирные устройства, расположенные на задних краях крыльев, их угловое положение регулируется для изменения подъёмных свойств самолёта. К примеру, определённое положение закрылков может позволить самолёту лететь на меньшей скорости при наборе высоты, или приземляться под более крутым углом, при этом не увеличивая скорость. Одно из главных их преимуществ состоит в том, что ФПД становится короче. Вот что меня озадачивает: Может ли небольшая неисправность закрылка увеличить ФПД настолько, что взлётно-посадочная полоса окажется слишком короткой?
Перевод поста Anneli Mossberg и Olle Isaksson «Modeling Aircraft Flap System Failure Scenarios with SystemModeler».Выражаю огромную благодарность Кириллу Гузенко за помощь в переводе.
Вы что-нибудь слышали о Boeing 747 Dreamlifter, который прилетел не к тому аэропорту и был вынужден приземляться на слишком короткую взлётно-посадочную полосу? К счастью, эта история имела счастливую развязку, и никто из пассажиров не пострадал. Тем не менее, это весьма опасная ситуация — когда фактическая посадочная дистанция (далее — ФПД) длиннее взлётно-посадочной полосы, и возникать она может не только из-за ошибки пилота, который сбился с верного пути.Одна из возможных причин такого сценария — неисправность закрылков. Закрылки — шарнирные устройства, расположенные на задних краях крыльев, их угловое положение регулируется для изменения подъёмных свойств самолёта. К примеру, определённое положение закрылков может позволить самолёту лететь на меньшей скорости при наборе высоты, или приземляться под более крутым углом, при этом не увеличивая скорость. Одно из главных их преимуществ состоит в том, что ФПД становится короче. Вот что меня озадачивает: Может ли небольшая неисправность закрылка увеличить ФПД настолько, что взлётно-посадочная полоса окажется слишком короткой?
Чтобы ответить на этот вопрос, следует понять, как неисправности отдельных компонентов влияют на систему в целом. Как на это отреагирует система управления? Как это обнаружить во время испытаний? Есть ли какая то безопасная процедура, чтобы компенсировать это, и что случится, если пилоту или персоналу технического обслуживания по каким-то причинам не удастся следовать этой процедуре?
 Вместе с моим коллегой, инженером Олле Исакссоном мы решили использовать Wolfram SystemModeler 4 и недавно выпущенную Гидравлическую Библиотеку Wolfram для моделирования и анализа возможных неполадок, которые могут произойти с закрылками самолёта Cessna 441 Conquest II.
Вместе с моим коллегой, инженером Олле Исакссоном мы решили использовать Wolfram SystemModeler 4 и недавно выпущенную Гидравлическую Библиотеку Wolfram для моделирования и анализа возможных неполадок, которые могут произойти с закрылками самолёта Cessna 441 Conquest II.
Оптимальное угловое положение закрылков на этой модели Cessna устанавливается пилотом вручную через приборную панель самолёта. Помимо некоторых других факторов, оптимальный угол закрылков зависит от того, в какой фазе полёта самолёт находится, а фаза полёта в свою очередь определяет то, какие лётные характеристики будут оптимальными. Например, во время взлёта закрылки отклоняются на 10 градусов для обеспечения дополнительной подъёмной силы, а во время посадки они отклоняются на 30 градусов для увеличения как подъёмной, так и тормозящей сил. Эти казалось бы небольшие регулировки положения закрылков позволяют приземляться на более короткие взлётно-посадочные полосы, уменьшают силовые воздействия, оказываемые на самолёт, дают пилоту больше времени на реакцию. Для конкретно этого самолёта имеются ещё два дополнительных положения: 0 градусов для основной части полёта и 20 градусов при приближении к посадке. Посмотрите видео ниже, чтобы иметь представление, как движутся закрылки.
[embedded content]
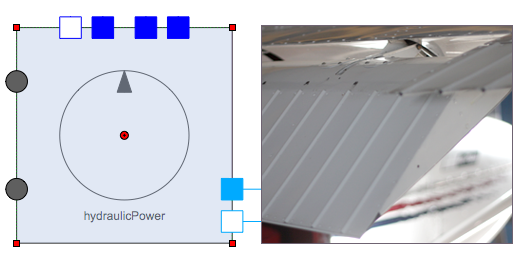
Закрылки на Cessna управляются электронной системой, а в действие приводятся гидравлической системой. То есть закрылки управляются электрическими сигналами, а само изменение их положения обеспечивается гидравлической системой, которая включает в себя насосы, клапаны, цилиндры и другие необходимые компоненты. Пилот управляет положением закрылков через переключатель положения закрылков, который расположен на приборной панели. При изменении положения переключателя отправляется электрический сигнал, который вместе с концевыми переключателями питает пропускной клапан, отчего в гидравлической системе возрастает давление.
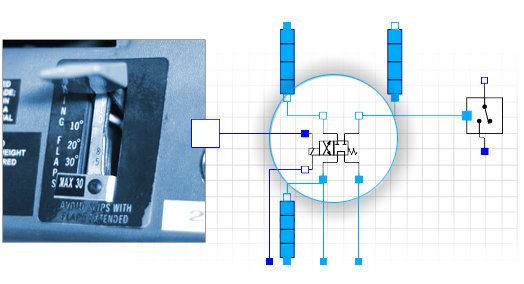
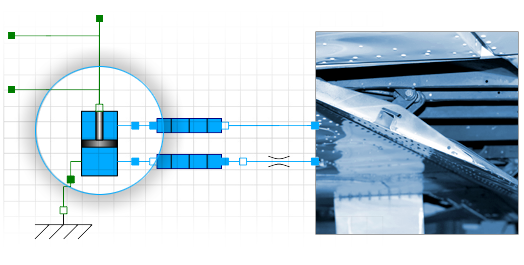
Вместе с подачей на пропускной клапан, соленоид управляющего закрылками клапана получает заряд, в результате чего открывается соединение между цилиндром (привод закрылка), насосом и резервуаром. Гидроцилиндр механически соединён с закрылками, то есть движение цилиндра вызывает изменение положения закрылок, а движение цилиндра происходит из-за изменения давления в камерах.
Модель
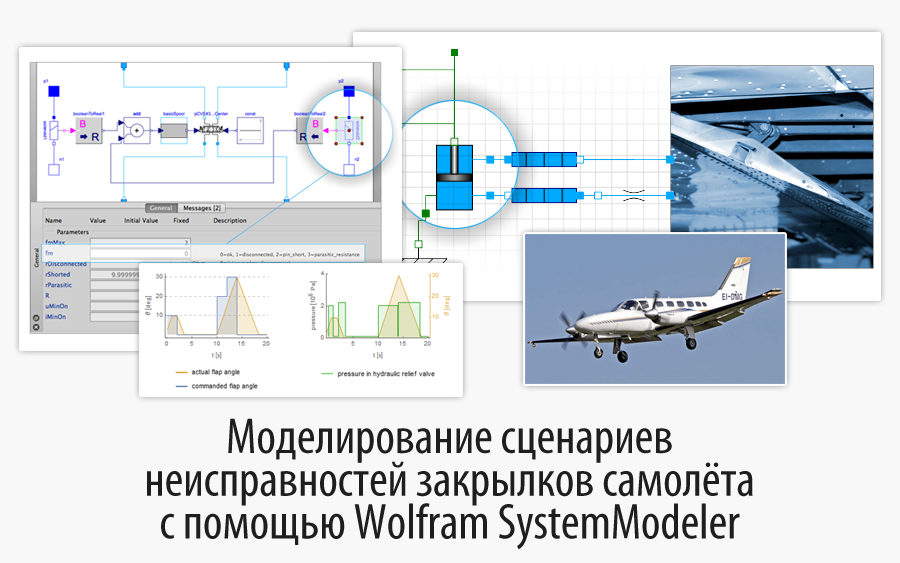
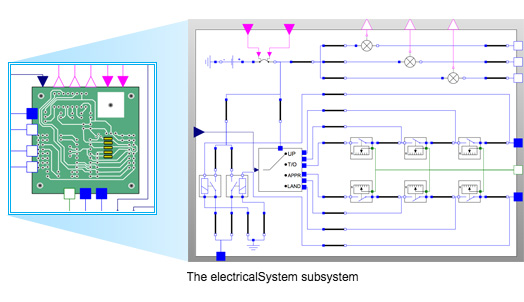
Модель системы закрылок Cessna, которую мы представили в SystemModeler, состоит из шести настраиваемых компонентов: пилота, электрической системы, силовой установки, гидравлической системы, закрылков и шасси.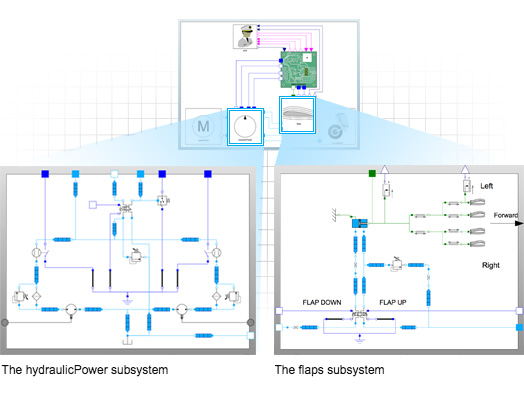
Как было показано выше, модель Cessna иерархическая, с несколькими подуровнями. Пилот получает сигналы и от электрической подсистемы, и от закрылков. К примеру, в виде данных о давлении в системе и информации о текущем положении закрылков. Подсистема энергообеспечения состоит из двух двигателей, которые соединены с насосами гидравлической системы, которые, в свою очередь, подают рабочую жидкость под давлением к закрылкам и подсистемам шасси. Чтобы не растягивать пост до размеров «Войны и мира», мне придётся опустить некоторые детали в описании модели, однако они будут приведены в последующем посте, в котором процесс моделирования будет описан подробнее.
Сейчас, когда в общем виде были описаны компоненты модели и их взаимодействия, пришло время поговорить о некоторых потенциальных неисправностях. Несмотря на мою боязнь полётов, я всё же исследовал некоторые отчёты о несчастных происшествиях с самолётами Cessna. Из них следует, что неисправность переключателей, протечки в гидравлической системе и механические повреждения являются примерами отказов закрылка, которые влияют на все системы самолёта. Таким образом, давайте включим следующие сценарии в анализ неисправностей:
1. Течь трубы в подсистеме закрылков.
2. Поломка механического стержня, соединяющего закрылок с цилиндром.
3. Электрический сбой в регулирующем клапане закрылок во время полёта.
Рассмотрим сперва сценарий, когда всё работает так, как надо, и пилот может спокойно управлять закрылками. Пилот перемещает переключатель, приводя его в положения 10° → 20° → 30° → 0°, которые соответствуют взлёту → заходу на посадку → посадке → полёту. Стоит заметить, что это довольная странная комбинация команд для закрылков, которая в реальной жизни вряд ли когда-либо будет осуществлена за 20 секунд; она имеет лишь учебную цель. Она, например, может рассматриваться как тест на корректность работы закрылков.
Сперва следует загрузить WSMLink и задать модель.
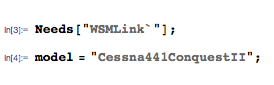
Мой коллега Олле систематизировал типы неполадок в различных компонентах модели Cessna. И для того, чтобы исследовать, к примеру, замыкание контактов на соленоиде, мне нужно будет просто переключиться в режим замыкания соленоида, а затем запустить симуляцию.
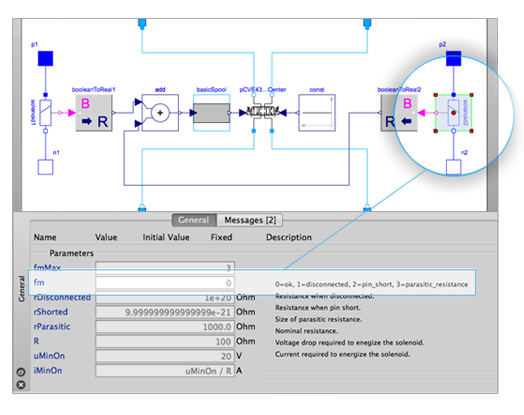
Для номинального случая все параметры неисправностей приравняем к нулю, то есть все компоненты работают нормально. Поскольку режимы неисправностей — структурные параметры, то нужно использовать WSMSetValues вместо WSMParameterValues.
В каком положении на самом деле будут закрылки в сравнении с тем, какое положение установил пилот в номинальном случае?
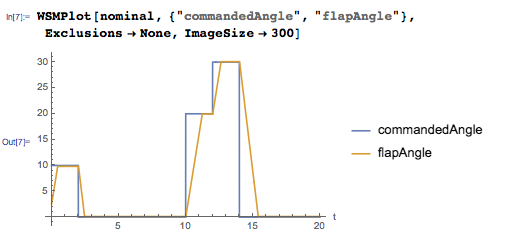
Как можно увидеть, положение закрылков меняется в зависимости от команд пилота, однако положение меняется с некоторой задержкой, вызванной определённым временем втягивания/вытягивания закрылок.
Давайте так же рассмотрим то, как создаётся давление в разгрузочном гидроклапане, что соответствует давлению, которое подаётся на закрылки. Другой интересный аспект, особенно для электрических неисправностей — электрический сигнал, который указывает закрылкам открыться.
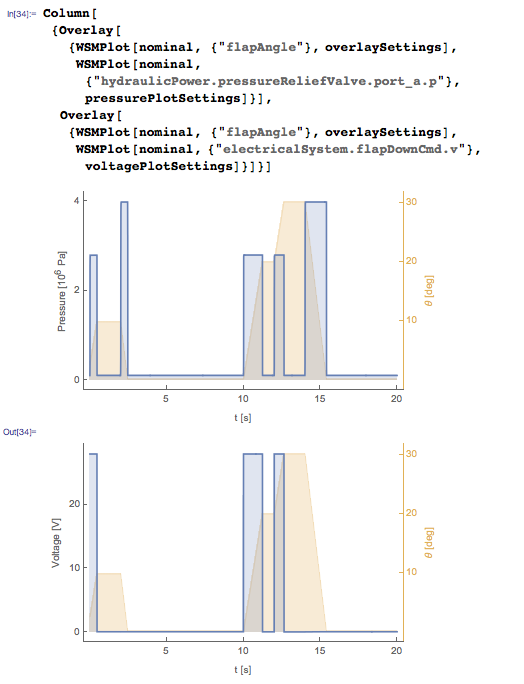
На графиках выше можно увидеть, как пики давления соответствуют положению закрылков, и как пики электрических сигналов соответствуют командам по изменению их положения, которые отправляет пилот.
Сейчас давайте рассмотрим другие варианты и посмотрим, как они соотносятся с номинальным.
Сценарий: Течь в трубе
В этом сценарии неисправности закрылки имеют такое же начальное положение, как и в номинальном случае, но в подсистеме закрылков труба имеет течь. Утечку можно встроить в модель, изменяя параметр fm для трубы в диапазоне от 0 до 2.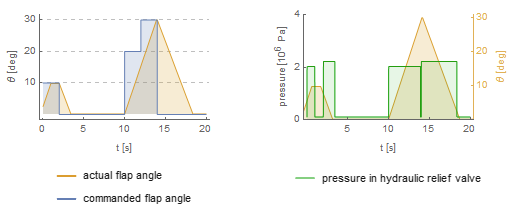
На изображениях показана модель системы с текущей трубой — слева контролируемый угол закрылка и фактический угол закрылка, справа изменение давления в разгрузочном гидроклапане в гидравлической подсистеме hydraulicPower.
Мы можем видеть, что утечка уменьшает давление в системе, что в свою очередь уменьшает силу давления цилиндра. Снижение ведёт к более медленному движению закрылков, что в масштабе всей системы увеличивает время отклика. Такой сценарий может быть опасным, если пилот находится в положении, когда закрылки должны быстро изменять своё положение, например, если самолёт приблизится к взлётно-посадочной полосе слишком быстро или под неверным углом.
Сценарий: Сломанный стержень
Как ранее было упомянуто, подсистема закрылков содержит гидроцилиндр, который управляет движением закрылков. Давайте исследуем, что произойдёт, если сломается стержень, соединённый с закрылками, то есть никакая сила не сможет быть передана через этот стержень.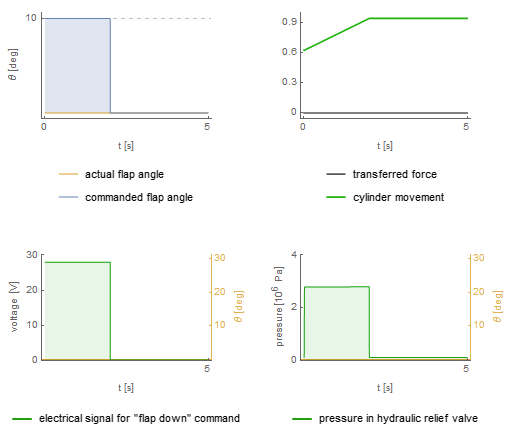
На двух нижних графиках мы можем видеть, что в системе происходит увеличение давления, а поведение электрического сигнала оказывается таким, какое и ожидалось. Несмотря на это, закрылки остаются в рабочем положении. Поскольку стержень сломан, то цилиндр не может передавать никакие силы для изменения положения закрылок (см. верхний правый график) независимо от того, какие команды поступают. В этом случае казалось бы маленькая неисправность приведёт к значительно более длинному ФПД.
Сценарий: Неисправность электронной системы во время полёта.
Иногда неисправность становится возможным обнаружить лишь тогда, когда самолёт уже в воздухе, и весьма важным является предусмотреть такие ситуации и иметь некоторый алгоритм действий, который бы позволил исправить любые неполадки. Давайте рассмотрим сценарий, когда возникли неполадки в электронной системе во время полёта. Пилот не смог испытать закрылки до взлёта, то есть команда на втягивание закрылок была впервые отправлена уже во время полёта. Электрический сбой в регулирующем закрылки клапане происходит из-за замыкания контактов соленоида. Короткозамкнутый соленоид размыкает цепь во время полёта, в результате чего пилот теряет контроль над закрылками.
Пилот не заметит эту неисправность, пока ему не придётся поменять положение закрылок с 10 градусов до нуля, в то время как всё ещё можно будет вытянуть закрылки. Однако в тот момент, когда пилот попытается вытянуть закрылки, короткое замыкание распространится на автоматический выключатель, и весь контроль над закрылками будет утрачен, в результате чего самолёту для посадки потребуется более длинная взлётно-посадочная полоса. Так себе перспектива, верно? Однако, мы могли бы протестировать некоторый алгоритм действий, который бы помог исправить ситуацию.
Сценарий: Неисправность электронной системы во время полёта и процедура устранения неисправности
Можно использовать модель Cessna для реализации процедуры устранения неисправности, которая позволяет благополучно посадить самолёт, несмотря на неисправность электронной системы. Эта процедура, к примеру, могла бы заключаться в переведении переключателя на посадку и последующему сбросу автоматического выключателя. После сброса стало бы возможным напрямую перевести закрылки в посадочное положение и безопасно осуществить посадку, даже если втягивание закрылок всё ещё не работает. Давайте посмотрим, сработает ли это.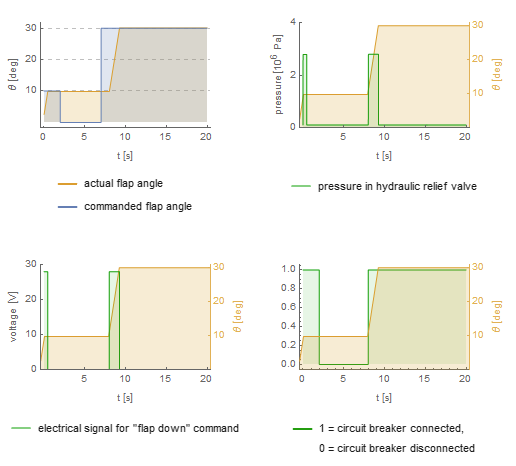
На изображении можно увидеть симуляцию сбоя электронной системы во время полёта, когда короткозамкнутый соленоид активирует аварийную систему закрылков.
Короткозамкнутый соленоид размыкает цепь во время полёта, в результате чего пилот теряет контроль над закрылками. Затем пилот ставит переключатель в позицию для приземления, сбрасывает автоматический выключатель и успешно открывает закрылки.
Каков вывод? Вернёмся к моему вопросу: Может ли небольшая неисправность закрылков увеличить ФПД настолько, что взлётно-посадочная полоса окажется слишком короткой? Судя по анализу отказов, это, пожалуй, правдоподобный сценарий. Это может произойти, если увеличение ФПД, вызванное неисправностью закрылков (к примеру, неисправность электронной системы во время полёта, которая оговаривалась выше), превысит длину взлётно-посадочной полосы. Стоит заметить, что эта модель разрабатывалась без сотрудничества с Cessna, то есть были сделаны некоторые предположения об устройстве, к примеру, электронной системы и значений некоторых параметров. Другими словами, невозможно гарантировать, что все аспекты модели являются на 100% точными или полными. Тем не менее, она показывает возможность использования моделирования как средства исследования различных сценариев возникновения неполадок, как они могут быть обнаружены и как разрабатывать процедуры из устранения.
Я использовал Wolfram SystemModeler для анализа неполадок после некоторой последовательности команд, то есть то, что могло бы быть сделано во время испытаний, например. Используя те же принципы, можно использовать SystemModeler для анализа на сбои кода труднодиагностируемых систем. Я также протестировал предложенную процедуру устранения неполадок и проверил то, как это всё взаимодействует в системе в целом, какие у системы возникают реакции. Подобные тесты позволяют лучше понимать принципы взаимодействия человек-машина.
Если Вы захотите провести моделирование каких-то неисправностей самостоятельно или же просто получить представление о тех инструментах, с которыми я работал в этом посте, Вы можете скачать пробные версии как SystemModeler, так и Mathematica. Да, и Wolfram Hydraulic library, и некоторые другие библиотеки можно скачать из нового хранилища библиотек Wolfram SystemModeler Library Store.
