[Перевод] Как устроен секретный мир для тренировки робомобилей Waymo

Carcraft, софт для построения виртуального мира
В углу кампуса компании Alphabet расположилась команда, работающая над программным обеспечением, которое может стать ключом к созданию робомобилей. Ни один журналист до этого момента его не видел. Они называют его Carcraft, в честь популярной игры World of Warcraft.
Создатель софта, молодой инженер с всклокоченной шевелюрой и лицом мальчика Джеймс Стаут, сидит рядом со мной в открытом офисном пространстве, где царит тишина и все пользуются наушниками. На экране изображён участок виртуальной дороги с круговым движением. Глазу зацепиться не за что — простое изображение из нескольких линий и фон с дорожными текстурами. Мы видим робомобиль Chrysler Pacifica, изображённый со средним разрешением, и простой каркасный короб, изображающий другое транспортное средство.
Несколько месяцев назад команда разработчиков наткнулась на такое круговое движение в Техасе. Скорость и сложность дорожной ситуации поставили машину в затруднительное положение, поэтому команда решила построить кусочек дороги такой же конфигурации на тестовом полигоне. А я смотрю уже на третий этап процесс обучения: оцифровку реального вождения. Здесь единственный манёвр водителя из реального мира — допустим, машина, подрезающая вас на круговом движении — можно превратить в тысячи симулированных сценариев, зондирующих границы возможностей автомобиля.
Такие сценарии формируют основу мощного инструмента для создания симуляций. «Большая часть работы над новыми возможностями мотивирована тем, что мы увидели в симуляциях», — говорит мне Стаут. Этот инструмент ускорил разработку робомобилей в Waymo, выделенной компанией Alphabet (в девичестве — Google) из своего исследовательского подразделения X в декабре 2016 года.
Если Waymo сможет создать полностью автономные автомобили в ближайшие несколько лет, Carcraft должны запомнить, как виртуальный мир, сыгравший значительную роль в изменении реального мира, на базе которого он был создан.
Изначально его разрабатывали для прокрутки сцен, встреченных машинами при поездках по дорогам общего пользования. Сейчас же Carcraft и вообще все симуляции играют возросшую роль в разработке робомобилей.
В каждый момент времени порядка 25000 виртуальных робомобилей бороздят полностью смоделированные версии Остина, Маунтин-Вью и Финикса, а также несколько проверочных треков. Waymo может проиграть симуляцию поездки по особенно сложной дороге сотни тысяч раз в день. В сумме по виртуальному миру машины наезжают до 8 млн миль в день. В 2016 году они проехали 2,5 млрд виртуальных миль, против всего лишь 3 миллионов миль, пройденных реальными прототипами робомобилей от Google по реальным дорогам. И, что важно, виртуальные мили концентрируют усилия на том, что сотрудники Waymo называют «интересными» дорогами, на которых машины могут научиться чему-то новому. Это не просто скучные мили по шоссе по дороге на работу.
Симуляции — часть замысловатого процесса, разработанного Waymo. Они плотно связали миллионы миль, накатанных их автомобилями по ДОП, с программой «структурной проверки», которую они проводят на секретной базе «Замок» в Центральной долине.
До сих пор Waymo не открывала миру свою систему. Мили, проезжаемые по обычным дорогам, показывают им, где их машинам требуется дополнительная практика. Они строят дороги необходимой конфигурации в Замке, что позволяет им разыгрывать тысячи различных сценариев прямо на месте. И в любом из двух вариантов проверок в реальном мире машины собирают достаточно данных для того, чтобы впоследствии в любой момент полностью воссоздать ситуацию в цифровом виде. В этом виртуальном пространстве можно освободиться от ограничений реальной жизни и создать тысячи вариантов любого сценария, а потом заставить машину пройти их все. По улучшению водящего машину софта его закачивают обратно в автомобили, которые затем ездят по дорогам ещё длиннее и ещё большей сложности, и цикл повторяется.
Чтобы попасть в Замок, от залива Сан-Франциско нужно ехать на восток, затем на юг по 99-му, а потом по шоссе Центральной долины, идущему на юг во Фресно. Кукурузные поля соседствуют с растущими пригородами; горизонт исчезает за сельскохозяйственной дымкой. Здесь на 30 градусов жарче, чем в Сан-Франциско, а поверхность такая плоская, что уклоны этого «земного моря», как назвал его Джон Макфи, можно измерять только при помощи лазеров. Вы съезжаете недалеко от небольшого городка Этуотер, где когда-то была военно-воздушная база Castle [«Замок»], на которой 6000 человек обслуживало программу B-52. Теперь она находится на северной границе небольшого городка Мерсед, в котором безработица в 2010-е достигла 20%, да и сейчас редко бывает ниже 10%. 40% населения говорят по-испански. Мы пересекаем железную дорогу и попадаем на территорию старой базы площадью в 650 га, на которой теперь расположена всякая всячина, от управления по контролю над дикими животными до Этуотерской государственной тюрьмы.
Мой навигатор в телефоне вёл меня не по конкретному адресу, а по GPS-координатам. Мы едем вдоль высокого непрозрачного зелёного забора, пока Google Maps не сообщает о том, что пора остановиться. Ничто не указывает на наличие каких-нибудь ворот. Выглядит всё, как ещё одна секция забора, но мой представитель принимающей стороны выглядит уверенно. Внезапно в расширяющейся щели между воротами и забором появляется охранник, и начинает проверять наши документы.

Ограда
Забор расступается, и мы въезжаем на суматошный кампус. Молодые люди в шортах и шляпах бегают туда и сюда. Видны жилые вагончики, купольные гаражи, а на парковке у главного здания — робомобили. Тут представлено несколько типов робомобилей — модели Lexus, которые жители США могли встречать на ДОП, Prius’ы, ушедшие в отставку и новые фургоны Chrysler Pacifica.
Робомобили легко отличить. Они утыканы датчиками. Больше других выдаются лазерные сканеры (лидары) на крыше. Но у Pacifica есть и небольшие лидары размером с пивную банку, вращающиеся около боковых зеркал. Сзади они оборудованы радарами, похожими на уши Шрека.
При включении датчиков машины, даже если она не движется, вращающийся лидар издаёт странный звук. Нечто среднее между воем и гулом, этот звук неприятен потому, что он мне кажется в новинку и мои уши не способны отфильтровывать его вместе остальными звуками машин, с которыми я вырос.
У главного здания запаркована и ещё более интересная машина. По всему кузову красным скотчем на неё нанесены знаки Х. Это машина четвёртого уровня. Уровни — это обозначения, выработанные сообществом автоинженеров, описывающие степень автономности робомобиля. Те машины на дорогах, о которых мы слышим, находятся на первом или втором уровне — то есть, они способны ехать на «умном» круиз-контроле по шоссе. Но машина с красными иксами — совершенно другой зверь. Она не только полностью автономна, человек внутри неё просто не сможет её вести — поэтому они не хотят смешивать её с другими своими машинами.
Мы подъезжаем к парковке, и повсюду чудятся признаки Манхэттенского проекта, научного аванпоста, техностартапа. В главном здании, мобильном вагончике размером с классную комнату, я встречаю движущую силу всего этого примечательного места. Её зовут Стеф Вильегас.
Она одета в длинную приталенную белую блузку с воротником, ужасно драные джинсы и серые вязаные кроссовки — всё ужасно модное, как и следует бывшему работнику бутика Azalea, откуда она перешла в Google. Она выросла в пригородном районе Восточный залив с другой стороны холмов от Беркли и получила диплом в области искусства в Калифорнийском университете в Беркли до того, как попала в программу разработки робомобилей в 2011-м.
«Вы водили машину?» — спрашиваю я.
«Вожу постоянно», — говорит она.
Бесчисленное количество часов она проводит в езде по шоссе 101 и 280, идущими от Сан-Франциско до Маунтин-Вью. Как и все водители, она выработала у себя ощущение того, как ведут себя машины на шоссе. И это знание оказалось довольно важным для программы по разработке робомобилей. У них выработалось интуитивное представление о том, что может быть сложным для машин. «Проверяя обновлённое ПО и обладая постоянной должностью в команде, я начала думать о том, какие ещё сложные задачи можно было поставить перед системой», — говорит она.
Так что Вильегас и несколько инженеров начали придумывать и создавать редкие сценарии ситуаций, которые позволят им проверить новое поведение машин в контролируемой обстановке. Они начали занимать парковку напротив Прибрежного амфитеатра, устанавливая на входах своих людей, чтобы на парковке оставались одни только гуглеры.
«Там всё и началось, — говорит она. — Там была я и несколько водителей. Мы придумывали набор идей, которые хотим проверить, грузили всё необходимое в пикап, и водили его по парковке, делая проверки».
Так возникли первые структурированные тесты в программе разработки робомобиля. Оказывается, что сложнее всего было обрабатывать не сложные сценарии, придуманные людьми, вроде того, «что если на дороге зомби будет есть человека», а просто уверенно и надёжно ехать в бесконечных вариантах обыкновенного дорожного движения.
Вильегас начала собирать реквизит из всего, до чего могла добраться: манекены, конусы, искусственные растения, игрушки, роликовые доски, трёхколёсные велосипеды, куклы, мячи, всякие штуки. Всё это шло в набор реквизита (в результате его стали хранить в палатке, а теперь — в Замке, на специальном складе).

Склад реквизита
Но появлялись проблемы. Нужно было, чтобы машина ехала быстрее, распознавала светофоры и знаки. В планы постоянно вмешивались проходившие в Амфитеатре концерты. «Были случаи типа: 'Ну вот, Metallica приезжает, придётся нам сваливать' » — говорит она.
Им нужна была секретная база. Замок стал именно этим. Они подписали договор аренды и начали строить свой ненастоящий город мечты. «Мы специально делали жилые улицы, шоссе, тупики, парковки, и всё такое, чтобы у нас получилась репрезентативная выборка характерных мест, по которым можно было бы поездить».
Мы идём из основного офиса к её машине. Она даёт мне карту, когда мы отъезжаем на экскурсию. «Это как в Диснейленде, чтобы вы могли ориентироваться», — говорит она. Карта тщательно проработана. В одном углу значок в стиле Вегаса: «Добро пожаловать в Сказочный замок в Калифорнии». Разные районы кампуса даже придерживаются правил наименования. В том, который проезжаем мы, каждая дорога названа в честь знаменитой машины (DeLorean, Bullitt) или в честь машины из первого парка на базе Prius, существовавшего в ранние дни работы программы (Barbaro).
Мы проезжаем мимо розоватых строений, старых казарм, одна из которых подверглась реновации — там отдыхают сотрудники Waymo, когда им не удаётся вернуться обратно к заливу. Кроме этих, других зданий в тестовой зоне нет. Это действительно город для робомобилей: всё, что имеет значение, находится либо на самом асфальте, либо граничит с ним.

«Город» в Замке
Для человека всё это выглядит как уровень компьютерной игры без персонажей. Довольно странно ощущаешь себя, съезжая с бульваров на вроде как жилые улицы с цементными проездами и пригородными развязками, на которых нет зданий. Какие-то участки дороги периодически кажутся мне знакомыми.
Мы подъезжаем к большому двухполосному круговому движению. В центре находится круг с белой оградой. «Это круговое движение появилось здесь конкретно после того, как мы опробовали на себе многополосное круговое движение в Остине, в штате Техас, — говорит Вильегас. — Сначала у нас было только однополосное круговое движение, и мы решили: 'Ну ладно, этот этап мы закончили'. А потом мы наткнулись на многополосное, и поразились: 'Ого, лошадь другого цвета! Спасибо, Техас'. Поэтому мы создали у себя и этого красавца».

Мы останавливаемся, и Вильегас рассматривает одно новое дополнение: две автомобильных и одна велосипедная полоса движения идут мимо параллельной парковки, граничащей с газоном. «Мне очень хотелось создать тут улицу с параллельной парковкой. Такое часто встречается в пригородах. Уолнат-Крик. Маунтин-Вью. Пало-Альто, — говорит она. — Люди выходят из магазинов или с парковки. Люди идут между машинами, переходят дорогу с вещами в руках». Полоса была осколком её воспоминания, воплощённым в асфальте и бетоне, который затем превратится в более абстрактную форму, в улучшение возможности робота обрабатывать знакомую ей местность.
Она везёт меня обратно к главному офису, и мы залезаем в робомобиль-фургон, один из Chrysler Pacificas. Наш водитель — Брендон Кейн. Его помощник на пассажирском сиденье будет отслеживать поведение автомобиля на ноутбуке при помощи программы XView.
С ними работает группа ассистентов, которых они называют «лисами» — кличка выросла из слова «искусственный» [fox — лиса, faux — искусственный / прим. перев.]. Они водят автомобили, создают дорожное движение, играют пешеходов, ездят на велосипедах, держат знаки «стоп». Это актёры, чьей аудиторией служит автомобиль.
Первая наша проверка — простой проезд и подрезание, но на высокой скорости. В данном случае это 70 км/ч. Мы едем прямо по широкой дороге, которую они назвали Автобан.
Когда нас подрезает лиса, машина Waymo тормозит и команда проверяет ключевой показатель в данном случае: торможение. Они пытаются создать ситуации, в которых машине нужно будет резко тормозить. Насколько резко? Где-то между «чёрт, не успеваю на светофор» и «я резко вспотел, и телефон улетел с сиденья».
Скажу странную вещь: это не первая моя поездка в робомобиле. В прошлом я уже дважды ездил на двух разных робомобилях: первый раз на внедорожнике Lexus, возившем меня по улицам Маунтин-Вью, а второй — в маленькой гугловской машинке Firefly, катавшейся по крыше здания Google. Это были ничем не примечательные поездки, к чему, собственно, все и стремятся.
Сейчас всё по-другому. Две быстро движущиеся машины, одна из которых должна подрезать нас достаточно резко.
Пора на старт. Кейн запускает авто, и после звукового сигнала машина говорит: «Автовождение». Другая машина приближается к нам и подрезает нас как водитель на Porsche, стремящийся первым подъехать к выходу. Мы тормозим сильно, быстро и плавно. Я впечатлён.
Они проверяют данные по торможению и понимают, что тормозили мы недостаточно резко. Придётся повторить. И снова, и снова… Вторая машина подрезает нас под разными углами, в разной манере. Они называют это «получить покрытие».
cdn.theatlantic.com/assets/media/img/posts/2017/08/716B6407_1/013d74d00.jpg
Перестроение на высокой скорости. Одна из машин автономная.
Делаем ещё три проверки — перестроение на высокой скорости, встреча с машиной, выезжающей задом из переулка в трёх кварталах от нас, и плавная остановка при виде выкатившегося на дорогу баскетбольного мяча. Каждый из манёвров по-своему впечатляющий, но тест с подрезанием запомнился мне больше всех.
Когда мы идём на повторный старт, Кейн перемещается на сиденье. «Вы смотрели 'Тихоокеанский рубеж'? — спрашивает он меня. — Фильм Гильермо дель Торо, где люди синхронизируют действия с гигантскими роботами, чтобы сражаться с чудовищами. Я вот пытаюсь синхронизировать действия с робомобилем. У нас некоторые мысли общие».
Я прошу его объяснить, что он имеет в виду. «Я пытаюсь подстроиться к разнице в весе из-за присутствующих в машине людей, — говорит он. — Я много времени провожу в машине и могу чувствовать, что она делает, — звучит странно, да — своей задницей. Я вроде как понимаю, что она хочет сделать».
Далеко от дымки и жары Замка в Маунтин-Вью расположена комфортабельная штаб-квартира Google. Я приехал к ним, чтобы встретиться с инженерами, работающими внутри X, который может быть известен вам, как Google X. Это подразделение компании занимается долгосрочными высокорисковыми исследовательскими проектами. В 2015 году, когда Google провёл реструктуризацию и организовал конгломерат Alphabet, X отбросила Google в названии (их сайт так и называется: X.company). Через год после этого X/Alphabet решила выделить программу создания робомобилей в отдельную компанию, как уже случалось с разными другими проектами, и так появилась Waymo. Вроде как двоюродный ребёнок Google.
Так что, хотя офисы Waymo всё ещё находятся внутри «корабля-носителя», эти две клики уже потихоньку разделяются, и все работники Waymo сидят отдельно.
Здание X/Waymo большое и лёгкое. Повсюду развешены прототипы беспилотников Project Wing. Вижу маленькую машинку Firefly, построенную компанией. «Есть что-то милое в том, что ты сделал сам, — говорила мне Вильегас в Замке. — Но в них не было кондиционера, так что я по ним не скучаю».
Недалеко от кафетерии в углу одного из крыльев здания находится кластер симуляций Waymo. Кажется, что у всех на экранах работают Carcraft и XView. Заметно большое количество полигонов на тёмном фоне. Именно эти люди создают виртуальные миры, по которым ездят автомобили Waymo.
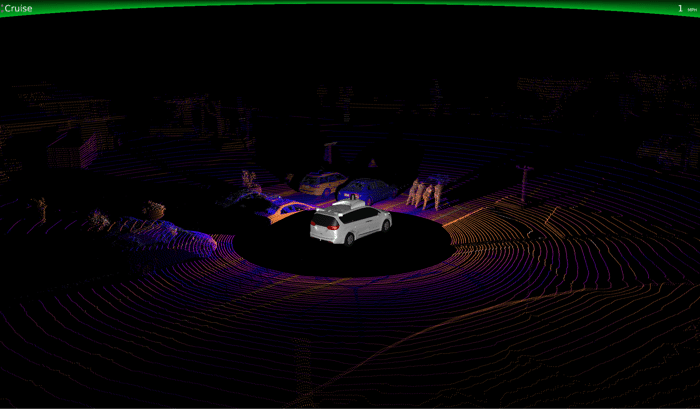
Что увидел лазерный сканер Waymo, когда четверо толкали автомобиль
Меня ждёт Джеймс Стаут, создатель Carcraft. Ему не выпадает возможности публично рассказывать о своём проекте, поэтому его энтузиазм рвётся наружу. Carcraft — его детище.
«Я просматривал вакансии и увидел, что команда по созданию робомобилей набирает сотрудников, — говорит он. — Не могу поверить, что они просто вывесили вакансию». Он попал в команду и сразу приступил к созданию инструмента, благодаря которому сегодня проходится по 8 млн виртуальных миль в день.
Изначально инструмент использовался в основном для наблюдения за тем, что их машины сделали бы в сложных ситуациях, в которых контроль над автомобилем берут живые водители. Из таких моментов они начали создавать сценарии. «Быстро стало ясно, что это весьма полезный инструмент, и что на его основе можно многое создать», — говорит Стаут. Возможности Carcraft выросли так, что теперь в него вмещаются целые города, а количество машин выросло до огромного виртуального парка.
Стаут знакомит меня с Еленой Коляровой [Elena Kolarov], главой отдела «обслуживания сценариев». Перед ней стоит два монитора. Справа — Xview, показывающий то, что видит машина. Машина использует камеры, радар и лидар для определения объектов в поле зрения — она представляет их в виде небольших каркасных форм.
Зелёные линии выходят из форм и показывают возможные пути, по которым, как считает машина, объекты могут двигаться. Внизу расположен кусочек изображения, на котором видно, что снимают обыкновенные камеры автомобиля. Колярова может включить показ данных, полученных с лидара — они отображаются оранжевыми и фиолетовыми точками.
Мы смотрим на воспроизведение реального случая перестроения в одну линию на круговом движении в Замке. Колярова переключается в симулятор. Выглядит всё так же, но это уже не запись события, а новая ситуация, с которой машина должна справиться. Разница лишь в том, что в верхней части экрана есть надпись «симуляция», большими красными буквами. Стаут говорит, что пришлось её добавить, потому что люди всё время путали симуляцию с реальностью.

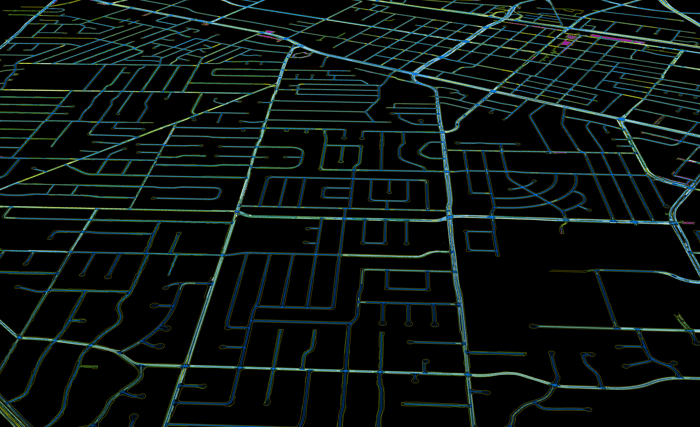
Как круговое движение в Замке выглядит в XView
Они загружают другую ситуацию. Это было в Финиксе. Колярова увеличивает картинку, чтобы показать их модель города. Для всей модели они разметили, «где находятся все полосы движения, какие полосы переходят в какие, где стоят знаки остановки, где расположены светофоры, тротуары, где расположены центры полос — всё, что нужно знать», — говорит Стаут.
Теперь мы увеличиваем один четырёхсторонний перекрёсток где-то близ Финикса. Колярова начинает расставлять на нём искусственные автомобили, пешеходов и велосипедистов.

Создание искусственной ситуации в Carcraft
По нажатию горячей клавиши объекты начинают движение. Машины ведут себя, как машины, едут в своей полосе или поворачивают. Велосипедисты ведут себя соответственно. Их логику взяли из данных, полученных из миллион миль, накатанных по ДОП. И всё это основано на сверхдетализированной карте мира и физических моделях разных участников ситуации.

Неудивительно, что сложнее всего симулировать поведение других людей. «Я не волнуюсь о тебе за рулём, я волнуюсь о всех остальных людей на дороге».
«Наши машины видят мир, понимают мир. Они понимают намерения всех динамических участников окружения — машин, пешеходов, велосипедистов, мотоциклистов. Недостаточно просто отслеживать предмет в пространстве. Надо понимать, что он делает, — говорит мне вице-президент Waymo по разработке, Дмитрий Долгов. — Это ключевая задача в создании умелого и безопасного робомобиля. Такое моделирование, такое понимание поведения других участников движения, очень похоже на моделирование их поведения в симуляции».
Есть одно ключевое отличие: в реальном мире нужно было бы свежие, полученные в реальном времени данные, обрабатывать на лету и превращать в понятный машине сценарий, после чего ориентироваться в нём. Но сейчас, после нескольких лет работы в этом проекте, они уверены, что способны это делать, потому что они «провели кучу проверок, показывающих, что мы способны распознавать огромное количество вариантов пешеходов», — говорит Стаут.
Так что в большинстве ситуаций они просто пропускают этап распознавания объектов. Вместо того, чтобы скармливать машине сырые данные, которые она должна распознать, как пешехода, они просто говорят ей: тут пешеход.
На перекрёстке Колярова усложняет жизнь машины. Она жмёт V, горячую клавишу для средства передвижения, и в Carcraft появляется новый объект. Затем мышкой в правом меню она выбирает среди типов автомобилей мой любимый: bird_squirrel.
Различные объекты можно заставлять действовать согласно предварительно настроенной логике в Waymo или запрограммированой логике в Carcraft, чтобы они двигались совершенно определённым образом — это нужно для проверок разных типов поведения. «Существует большой спектр между полным контролем над ситуацией и простой расстановкой объектов в сцене, после чего можно просто запустить их все», — говорит Стаут.
Как основа ситуации настроена, можно начинать проверять все важные варианты, содержащиеся в нём. Допустим, вы хотите на одном перекрёстке проверить различную последовательность прибытия на него машин, пешеходов и велосипедистов, различное время их остановки, их скорости и всё, что угодно. Тогда можно просто установить разумные промежутки для соответствующих параметров и проиграть все комбинации этой ситуации.
Они называют это размытием, и в данном случае на нашем перекрёстке автоматически было создано 800 ситуаций. В результате получается красивая кружевная диаграмма — и все программисты могут свериться с ней и посмотреть, как разные комбинации переменных влияют на выбранный робомобилем путь.

Диаграмма выборов
Проблемой становится анализ всех этих вариантов и симуляций для поиска интересных данных, способных помочь программистам улучшить программу вождения. Первым этапом может быть следующий: застрял ли автомобиль? Если да, то эта ситуация становится интересной для того, чтобы поработать с ней.
Ниже показана анимация как раз с такой ситуацией. Сложный перекрёсток, существующей в реальности в Маунтин-Вью. Поворачивая налево, машина засекла появившегося велосипедиста, из-за чего она остановилась на дороге. Программисты взяли этот класс проблем и переработали ПО, чтобы оно правильно реагировало на ситуацию. На видео показана реальная ситуация, а затем её симуляция. Там, где они расходятся, видно, что симулированная машина продолжает движение, а затем появляется пунктирный короб с надписью «shadow_vehicle_pose». Пунктирный короб показывает, что случилось в реальности. Для сотрудников Waymo это самая чёткая визуализация прогресса.
Но им нужно искать не только те случаи, в которых машина застряла. Они могут выискивать ситуации, в которых время, потраченное на решение, было слишком долгим, или торможение оказалось слишком медленным. Всё, что программисты подстраивают и изучают, они симулируют в целях поиска проблем.
Стаут и глава отдела ПО Долгов специально уточняли, что у симуляции есть три основных свойства. Во-первых, в симуляции можно проехать гораздо больше миль, чем это было бы возможно с физическим парком;, а опыт — это хорошо. Во-вторых, эти мили концентрируются на интересных и сложных взаимодействиях, а не просто на скучных милях. В-третьих, циклы разработки ПО могут идти гораздо быстрее.
«Нам крайне важен цикл повторов, и проделанная над симуляцией работа позволяет нам кардинально сжать его, — сказал мне Долгов. — Цикл, на работу с которым в первое время у нас уходили бы недели, сейчас проходит за минуты».
А что же насчёт пятен масел на дорогах? Лопающиеся шины, странные птицы, дыры, размером с раковину, и всеобщее безумие водителей. Это они симулируют? Долгов был уверен в себе. Он говорит, что они могли бы это делать, но «как сильно вам нужно увеличивать точность симулятора?»
Польза виртуальных миров Carcraft не в том, что это прекрасные, идеальные и фотореалистичные изображения реального мира. Их польза в том, что они отражают реальный мир в аспектах, важных для робомобилей, и позволяют им проезжать на миллиарды миль больше, чем позволили бы физические проверки. Ведущее машину ПО не принимает решения, в мире, похожем на реальный — для него всё обстоит так, как будто оно принимает решения в реальном мире.
И эта система работает. Департамент транспорта Калифорнии требует, чтобы компании сообщали о том, сколько их робомобили накатали миль за год, и сколько раз водителям приходилось брать управление на себя. Waymo не только отъездила на три порядка больше миль, чем кто-либо другой, но и количество случаев передачи управления быстро падает.
Waymo накатала 635 868 автономных миль с декабря 2015 по ноябрь 2016. На этих милях передача управления происходила 124 раза, в среднем раз в 5000 миль, или 0,2 передач на 1000 миль. В предыдущем году они наездили 424 331 автономных миль, у них было 272 переключений, в среднем каждые 890 миль, или 0,8 переключений на 1000 миль.
Все, конечно, говорят о том, что эти цифры нельзя сравнивать, но давайте будем реалистами: это лучшие показатели для Калифорнии. Все остальные в сумме наездили от силы 20 000 миль.
Подход Waymo не удивляет сторонних экспертов. «Сейчас можно измерить изощрённость команды, работающей над автономностью — будь то беспилотник, или автомобиль — тем, насколько серьёзно они относятся к симуляции», — говорит Крис Диксон, венчурный капиталист из Andreessen Horowitz, проводивший инвестиции компании в фирму Improbable, занимающуюся симуляциями. «И Waymo находится на самом верху, они самые изощрённые».
Я спросил главу по инновациями компании Allstate Insurance, Сунила Чинтакинди, о программе Waymo. «Без надёжной инфраструктуры симуляций никак нельзя создать машины с высшими уровнями автономности, — сказал он. — Я даже не стал бы разговаривать с человеком, считающим иначе».
Другие исследователи вопроса выбирают сходные пути. Хьюи Пенг — директор Mcity, лаборатории автономного и объединённого транспорта Мичиганского университета. Пенг говорит, что любая система, работающая для робомобилей, будет «комбинацией из 99% симуляции, тщательно разработанных структурных проверок и какого-то объёма проверок на дорогах».
Они вместе с аспирантом предложили систему объединения пройденных реальных миль с симуляцией, для значительного ускорения проверок. Система немного напоминает реализацию от Waymo. «Мы предлагаем убрать все скучные этапы вождения и оставить интересные, — говорит Пенг. — Это позволит вам ускориться в сотни раз: тысяча миль превращается в миллион».
Удивляет масштаб, организация и активность проекта Waymo. Я описал структурные проверки, проведённые Google, Пенгу, включая и 20 000 ситуаций, попавших в симуляции из структурных проверок, проведённых командой в Замке. Он сначала не расслышал меня и начал говорит, что «эти 2000 ситуаций — впечатляющая цифра». Я поправил его: «Это было 20 000 симуляций». Он замолчал.»20 000, — сказал он, обдумав. — Это впечатляюще».
На самом деле, все эти 20 000 ситуаций представляют собой малую долю общего количества ситуаций, проверенных Waymo. Это только результаты обработки структурных проверок. У них есть ещё больше ситуаций, взятых из езды по реальным дорогам и просто из головы.
«У них неплохо получается, — сказал Пенг. — Они сильно обогнали всех остальных в разработке четвёртого уровня», используя жаргонное сокращение для полностью автономного автомобиля.
Пенг озвучил и позицию традиционных автопроизводителей. Он сказал, что те пытаются достичь чего-то совершенно другого. Они не нацеливаются на полную автономность, а пытаются добавлять технологии, помогающие вождению, «заработать немного денег», и потом продвинуться дальше по пути к полной автономности. Нельзя сравнивать Waymo, с ресурсами и корпоративной свободой, позволяющей поставить на машину лазерный дальномер стоимостью $70 000, с таким производителем, как Chevy, машины которого не должны стоить больше $40 000, чтобы продаваться на рынке.
«GM, Ford, Toyota и остальные говорят: 'Дайте мне уменьшить количество столкновений и жертв и увеличить безопасность для массового потребителя'. Их цель совершенно другая, — говорит Пенг. — Нам надо думать о миллионах машин, а не только о нескольких тысячах».
И в гонке за полную автономность у Waymo появилось больше препятствий, чем она привыкла — к примеру, Tesla. Крис Жерде — директор центра автомобильных исследований в Стэнфорде. Восемнадцать месяцев назад он рассказал моей коллеге, что Waymo «гораздо лучше понимает глубину проблем и то, насколько ближе всех остальных мы подошли к их решению». Когда на прошлой неделе я спросил его, считает ли он так же до сих пор, он сказал, что «многое поменялось».
«Такие автопроизводители, как Ford и GM выставили свои машины и построили свои наборы дорожных данных, — говорит он. — Tesla собрала огромное количество данных из разработки автопилота, изучая, как система ведёт себя именно в тех условиях, в которых оказываются их клиенты. Их возможность незаметно проверять алгоритмы и их быстро растущая база машин представляют собой потрясающую площадку для тестирования».
Жерде говорит, что в мире симуляций он видел нескольких конкурентов с довольно серьёзными программами. «Уверен, что возможностей симуляции существует очень много, но я видел некоторое количество вполне хороших примеров. Waymo уже не выглядит такой уникальной. У них действительно была фора, но сегодня существует множество групп, испытывающих схожие подходы. Так что сейчас вопрос в том, у кого это лучше получится».
Это не просто какая-то демонстрация работы нейросети, похожей на мозг. Это огромный прыжок вперёд в разработке ИИ, даже для компании, входящей в Alphabet, известной своей агрессивной политикой применения ИИ. Это не Google Photos, где ошибка ничего не стоит. Это система, которая будет жить и совершенно независимо взаимодействовать с миром людей. Она будет понимать наши правила, сообщать о своих желаниях, станет понятной для наших глаз и умов.
Кажется, что Waymo немного отошла от работы с ездой как с конкретным техническим навыком, и переходит к работе с ней, как с формой человеческой социальной активности. Что значит ездить «нормально», а не просто «законно»? Как научить этому ИИ?
Оказывается, что для создания такого ИИ нужно не просто огромное количество данных и искусство программистов. Это необходимые, но недостаточные условия. Доля этого нужно, чтобы люди синхронизировались с автомобилями, понимали мир так, как они. Водители в Замке понимают, что означает быть одной из этих машин, видеть и принимать решения так, как они. Возможно, это работает в обе стороны — чем лучше люди понимают машин, тем лучше машины понимают людей.
Память о круговом движении в Остине становится частью Замка становится набором данных робомобиля становится ситуацией для Carcraft становится сетью симуляций становится новым ПО которое, наконец, возвращается в физический робомобиль, едущий к этой развязке в Техасе.
Даже внутри полигональной абстракции симуляции, используемой ИИ для распознавания мира, присутствуют следы человеческих мечтаний, части воспоминаний, чувства водителей. Эти компоненты — не ошибки и не пятна, которые надо отскрести, но необходимые части системы, которая может совершить революцию в перевозках, в городах, и, чёрт возьми, почти везде.
