[Перевод] Фейс-контроль для питомцев
Компьютерщики, с днём вас! Пусть и не совсем официальным. Недавно мы провели опрос в нашем сообществе Microsoft Developer и выяснили, что у многих из вас есть котики. Поэтому решили сегодня рассказать вам о создании IoT-дверцы для животных с распознаванием мордочки (+ туториал).

Информация о проекте
Сегодня расскажем о создании двери для кошек в двери на улицу. С помощью нее владельцы домов смогут впускать и выпускать своих питомцев автоматически с помощью датчиков движения с функцией распознавания объекта.
Используемые в проекте компоненты
Аппаратные средства
- Raspberry Pi 3, модель B.
Мы используем Raspberry Pi, но подойдет также MinnowBoard. В этом случае поменяйте «АRM» в инструкции ниже на «x86».
- Microsoft LifeCam 3000.
Подойдет любая USB-камера.
- Датчик движения PIR (универсальный) — две штуки.
- Servo Plate A — две штуки.
- HS-485HB Servo — две штуки.
- Светодиод (универсальный) — две штуки.
- Дверь для питомца.
- Adafruit PWM, 16 каналов, 12 бит/Servo Driver — интерфейс I2C — PCA9685.
Используется для управления сервомеханизмами PWM через интерфейс I2C.
Программные приложения и онлайн-службы
- Microsoft Windows 10 IoT Core
- OpenCV
- Microsoft Visual Studio 2017
Инструменты и устройства
- 3D-принтер (универсальный)
- Пила (универсальная)
- Дрель (универсальная)
Проект
В этом проекте задействована функция машинного распознавания образов, позволяющая войти в дом только вашей кошке. Дверь активируется датчиком движения и открывается только после распознавания морды вашей кошки.
Возможно, вам будет интересно дополнить проект следующими функциями:
- интерфейс пользователя для просмотра фотографий животных, которые пытались проникнуть в дом;
- панель, на которой отображается информация о том, как часто ваш питомец выходит из дома и возвращается назад;
- возможность дополнительного обучения классификатора на основе изображений вашей кошки;
- система отправки сообщений с фотографиями животных, которым было отказано в доступе в дом, с возможностью вручную менять решение классификатора.
Первоначальная настройка
- Настройте Raspberry Pi или MinnowBoard на компьютере, следуя этой инструкции.
- Подключите USB-камеру, клавиатуру и мышь к устройству.
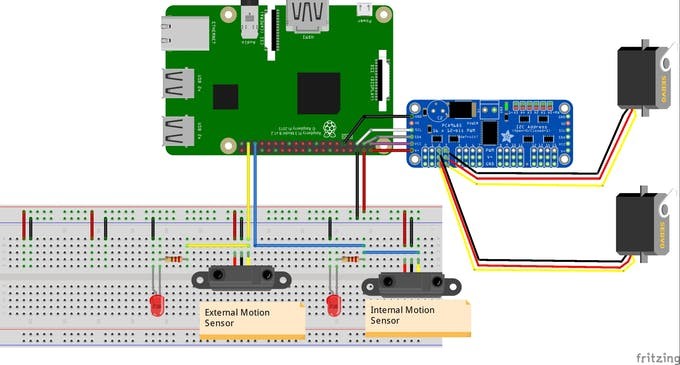
- Подключите датчики движения PIR, сервомеханизмы и светодиоды согласно схеме, приведенной ниже. Сервомеханизмы используются для открывания и закрывания двери.
- Включите компьютер и активируйте коннектор Lightning, следуя этим инструкциям.
Настройка оборудования
Отпилите один конец каждой пластины сервомеханизма пилой так, чтобы они были вровень со стенкой сервомеханизма (см. фото ниже). В результате дверь будет открываться полностью, не ударяясь об эти пластины.

Затем просверлите в верхней части двери для питомца отверстия, в которых будут размещаться светодиоды и датчики движения. Отверстия должны быть немного шире сенсоров.

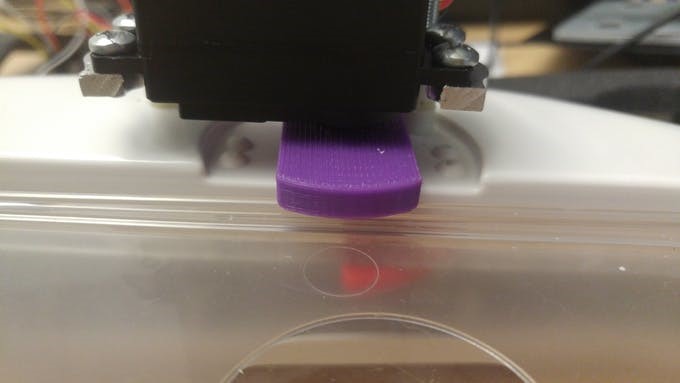
Наконец, распечатайте на 3D-принтере два соединителя сервомеханизма и корпус, если посчитаете нужным. На иллюстрациях к этой инструкции показан корпус MinnowBoard.
Прикрепите соединители к сервомеханизмам на противоположной от ограничителей стороне двери. Теперь сервомеханизмы смогут управлять открытием и закрытием двери.
Настройка программного обеспечения
- Используйте командную строку для перехода в папку, где будет располагаться проект:
cd <путь к папке> - Запустите команду клонирования git для загрузки проекта:
git clone https://github.com/ms-iot/PetDoor.git - Откройте файл PetDoor.sln из только что скачанной папки с помощью Visual Studio 2017.
- Загрузите библиотеку OpenCV, скомпилируйте ее и добавьте двоичные файлы в проект, следуя этим инструкциям.
- В верхнем меню Visual Studio выберите Debug и ARM (для Raspberry PI) или Debug и x86 (для MinnowBoard).
- Нажмите кнопку Remote Machine (Удаленный компьютер). В диалогом окне Remote Connections (Удаленные соединения) укажите IP-адрес удаленного компьютера. IP-адрес отображается на панели IoT, которую можно скачать здесь.
Работа с программным обеспечением
У этого приложения имеется дополнительный интерфейс пользователя, где отображается видеопоток с камеры, а также самые недавние изображения, созданные в момент срабатывания триггера датчика движения. Возможна также работа без монитора. Дверь открывается автоматически при обнаружении движения в помещении. Если движение наблюдается снаружи, то изображения передаются с веб-камеры в классификатор изображений OpenCV и обрабатываются им. Классификатор передает вектор распознанной на изображении кошачьей морды. Если в нем содержатся данные, дверь открывается.
Полезный совет.
Светодиоды, подключенные к каждому датчику движения, загораются каждый раз при срабатывании триггера с подачей 5 вольт.
Проект разработан на базе Кодекса поведения Microsoft в отношении продуктов с открытым исходным кодом. Для получения дополнительной информации ознакомьтесь с Часто задаваемыми вопросами о кодексеу поведения или напишите по адресу opencode@microsoft.com, если у вас возникнут дополнительные вопросы либо комментарии.
Заказные запчасти
Соединитель сервомеханизма
Необходимо распечатать на 3D-принтере два соединителя и прикрепить их к сервомеханизмам на противоположной от ограничителей стороне двери. В результате сервомеханизмы смогут контролировать открытие и закрытие двери.
Корпус MinnowBoard Max
Этот корпус можно использовать для крепления MinnowBoard к двери.
Файл CAD на сайте thingiverse.com.
