[Перевод] Двухколесный робот на карданном моторе

С этим роботом я играюсь уже несколько месяцев. Перемещается он за счет поворачивания колес относительно груза маятника, а скорость контролирует, ориентируясь на обратную связь от датчика наклона. На его сборку меня вдохновило снятая на Consumer Electronics Show (CES 2020) видео-демонстрация с роботом Ballie от Samsung. Было понятно, что это для них чисто хайповый проект, который в серийное производство не выйдет. Тем не менее у меня возник интерес собрать нечто аналогичное.
Я поэкспериментировал с различными видами моторов: мотор-редуктором на постоянном токе, редукторными шаговыми двигателями и, наконец, двигателями с карданным подвесом. Версии с мотор-редукторами имели откровенные проблемы ввиду наличия мертвых зон и люфта, что делало невозможным точное управление, когда колесам для поворота нужно было менять направление вращения.
Версия же с карданным мотором, хоть и потребовала более сложного программного обеспечения для управления, но была лишена всех этих проблем и показала наилучшие результаты.
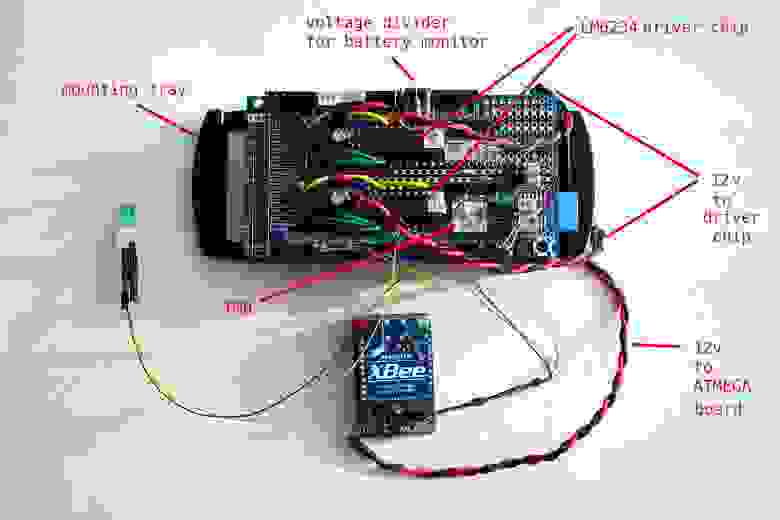
Управляется робот через ATMEGA2560 при помощи платы Arduino Mega с надстроенной поверх самодельной платой драйвера мотора. Управление реализуется с помощью двух радиотрансиверов Xbee, один из которых установлен в самом роботе, а второй на джойстике. Запитывается робот от 3-элементной батареи LiPo емкостью 1500 мАч.
Программное обеспечение
Программный стек, включая загрузчик, я написал с нуля (только avr-gcc, никакого кода .ino). В основу программы для драйвера мотора легла информации и примеры из проекта Simplefoc, который ведет группа людей, занимающихся Field Oriented Control (векторным управлением) высокоэффективных электромоторов.
Для определения ориентации робота используется комплекс Pololu «MinIMU-9 V2», состоящий из гироскопа, акселерометра и магнитометра. Полученные от гироскопа показатели интегрируются, сообщая угол наклона, для которого затем при помощи акселерометров применяется коррекция дрейфа.
После этого петля обратной связи приводит моторы в движение вперед-назад, работая против маятника в попытке нейтрализовать измеренный угол наклона. Добавление смещения к этому углу с помощью джойстика приводит к устремлению мотора в сторону угла наклона, и робот катиться в нужном направлении.
Корпус
Корпус я разработал в Blender, нарезал в Cura, а напечатал в PLA, используя Ender3 Pro.
Датчик вращения вала
Карданный подвесной мотор состоит из неподвижного набора катушек (статора) и вращающегося набора магнитов (ротора). Управление ротором реализуется путем пропускания тока через катушки, что приводит к генерации магнитных полей под прямым углом к полям магнитов.
Положение ротора измеряется при помощи микросхемы магнитного датчика вращения AS5048B и вращающегося магнита, закрепленного на валу двигателя. Этот магнит имеет форму диска, но намагничен по диаметру, а не вдоль своей оси, в результате чего его поле вращается вместе с валом двигателя. Ориентацию поля измеряет AS5048B при помощи четырех датчиков Холла, преобразуя измерения в цифровой сигнал, который может быть прочитан через двухпроводной интерфейс (TWI) ATMEGA.
На рисунке ниже представлен узел датчика вращения (показан лицом верх), крепление магнита и карданный мотор.

Драйвер мотора
Для создания тяги я использовал пару карданных моторов iPower GM5208–12. Обоими управляет ATMEGA посредством их интерфейсов PWM (широтно-импульсной модуляции) через микросхему драйвера LM6234, которая преобразует поступающие от ATMEGA низковольтные сигналы 5В в импульсы 12В, питающие катушки мотора от LiPo-батареи.
При проектировании схемы мотора я опирался на указания к применению, предоставленные производителем (AMS):
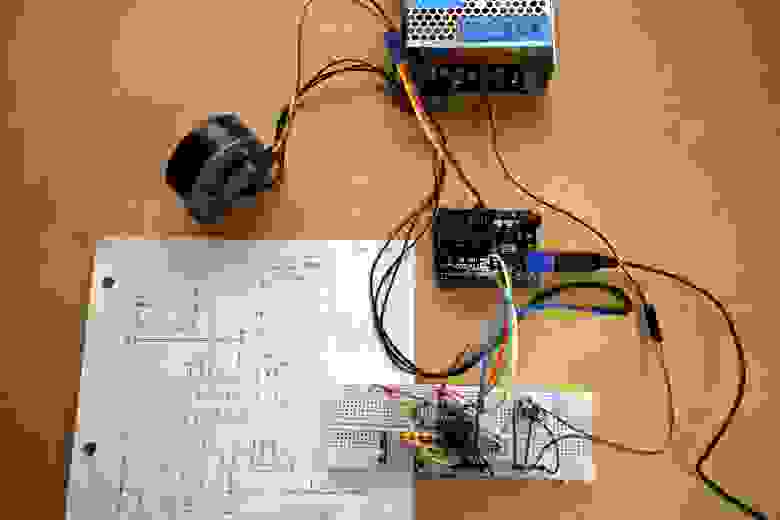
Первое тестирование проводилось на макетной плате с использованием соединительных проводов:
После всю эту конструкцию я собрал основательно уже на Arduino Proto Shield:
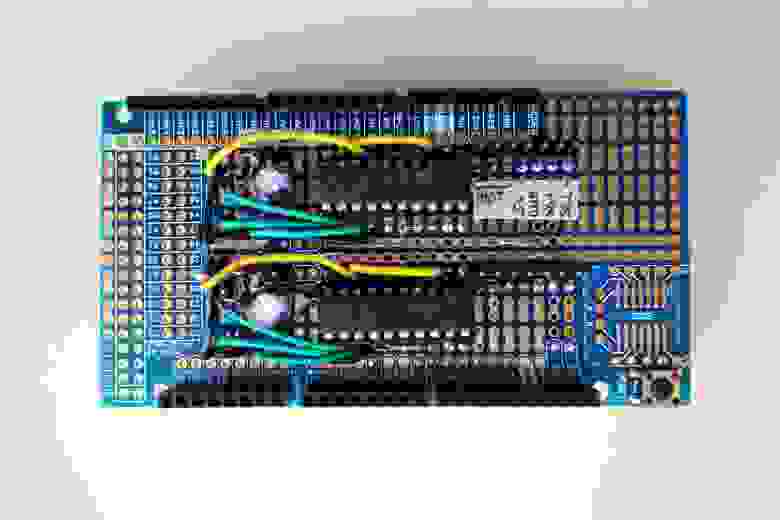

В полном комплекте плата выглядит так:
Финальная сборка
Один в один:

Результаты
Перемещение по комнате и кухне: Постукивание на заднем фоне — это наши каминные часы. Сам робот полностью беззвучен.
Материалы
Исходный код: скачать
Файлы stl: скачать
