[Из песочницы] Разработка комплекта электрификации велосипеда
Приветствую всех кто увлекается электроникой! Меня зовут Василий Сухопаров, я технический директор компании Eczo.bike. Хочу рассказать о том, как мы разрабатывали комплект электрификации велосипеда, с какими подводными камнями пришлось столкнуться и на какие инженерные хитрости пойти. Впереди будет немного программирования STM32, схем, тонкостей проектирования силовых плат и пару слов о механической составляющей КЭВ (Комплект Электрификации Велосипеда).

Комплект электрификации с максимальной мощностью 2600 Вт, бортовым компьютером, трекером, и сменными аккумуляторами.
Для чего все это было придумано?
Имея опыт самостоятельной сборки электробайка по частям и большое количество набитых шишек в процессе, привело меня к пониманию того, что на данный момент на рынке нет предложений соответствующих всем моим потребностям.
Каждую деталь приходилось подгонять, колхозить, что-то изобретать с нуля. Нельзя просто взять и воткнуть на велосипед электронику, как новую видеокарту в компьютер. Отсутствовала система Plug and Play Ride.
Своя собственная система могла бы обеспечить:
— модульность
— «юзер-френдли» интерфейс
— возможность тонкой настройки под себя
— отсутствие необходимости проводить пайку разъемов и вообще наличия познаний в электронике
— небольшой вес
Все вышеописанное — это то, с чем придется столкнуться обычному пользователю, пожелавшему переоборудовать велик китайскими комплектующими. С таким подходом электро-велосипедостроение останется надолго уделом гиков и электронщиков, неспособное войти в массы.
Промышленно выпускаемые решения не блещут особой мощностью (до 1000Вт) и зачастую встроены в собственные рамы велосипедов. В домашнем пылесосе «лошадей» и то больше:) Про конфигурируемость и подключение дополнительных возможностей вообще говорить не приходится.
Постепенно, начиная от разработки бортового компьютера в подвале своего дома (буквально) и заканчивая инвертором, системой управления аккумуляторной батареей и всего комплекта в целом, приходило понимание, как должно все выстраиваться, чтобы обеспечить максимальный комфорт от использования данного девайса. При этом, чтобы вещь работала на пользователя, а не пользователю приходилось тратить время, чтобы заставить ее работать.
Что же в итоге получилось?
Прототип на картинке до ката был собран по большей части ручным трудом, платы паяли прямо в офисе, и тут же программировали. На ЧПУ были фрезерованы корпуса из цельных брусков пластика, металлический каркас делался на производстве. Сборку аккумуляторов производили своим трудом, по технологии а-ля Tesla, базовым составляющим которого является элемент в форм-факторе 18650, подобные ячейки стоят и в большинстве ноутбуков. Да, формально Tesla катается на ноутбучных батарейках :-)

Бортовой компьютер показывает не только напряжение аккумулятора или процент заряда (что порой малоинформативно), но и расход в Вт*ч, удельное энергопотребление Вт*ч/км, и дальность хода, три основных параметра, которые хочется знать, когда едешь куда-то далеко, и необходимо спланировать маршрут. C увеличением скорости увеличивается и сопротивление воздуха, причем в прогрессии, и оно вносит основной вклад в расход энергии при движении. Экономить можно меньше нажимая тапку в пол, либо подкручивая педали.

Инвертор (в простонародье — контроллер) управляет мотором, позволяет настраивать под себя режимы езды, управление тягой, скоростью, мощностью, в общем, позволяет достаточно широко сконфигурировать систему. В нем встроены аппаратная защита от КЗ, контроль температуры транзисторов, мотора, реализована поддержка бессенсорного режима и возможность автоопределения параметров мотора. Мозгом инвертора является STM32F405. Контролируя все эти параметры можно обеспечить высокую надежность от большинства случаев, которые со мной возникали на китайской электронике (будь то перегрев мотора/контроллера, или выгорание силовых ключей из-за того что мотор заблокирован и т.п.).
Максимальные ТТХ такой железяки — IN: 30~90V 150A, OUT: 200A. В КЭВ используется упрощенная версия контроллера с более слабыми характеристиками.

BMS (Battery management system) — система управления аккумуляторной батареей. Подсчитывает заряд/разряд, контролирует процесс зарядки элементов и производит их балансировку, при необходимости. Отличие от обычных BMS опять же в надежности, чаще всего китайские BMS при КЗ с пламенем выгорали. Видно напряжение на каждом элементе батареи, под нагрузкой можно контролировать их внутреннее сопротивление. Основной брак аккумуляторов это повышенный саморазряд и ухудшение вн. сопротивления, что может привести к повреждению всей батареи, если вовремя не заметить.
Встроен термоконтроль. Добавление этого модуля в систему позволяет использовать заряд батареи максимально полностью без ущерба для ее здоровья, например снижать мощность при почти полном разряде или очень холодной/горячей температуре, ускоряет процесс зарядки используя собственный алгоритм балансировки.

Для переоборудования велосипеда был выбран подвесной мотор, т.к. только он позволяет получить хороший момент на колесе и большую мощность при меньшем весе. Этот моторчик весит 3 кг. Для сравнения мотор колёса бывают двух типов: Direct drive — «прямой привод» — бывают мощностью в 1000W и даже более, но весят они от 6 кг до 23 кг только за мотор. Geared — редукторные — до 500W вес от 2 кг, и буквально пару моторов 1000W до 4,5 кг. В первом случае приходится ставить усиленные обода на велосипед, и обязательно наращивать железо в месте крепления оси мотора, дабы раму не свернуло. Но ни одно мотор колесо в подобной весовой категории не позволяет получить момента порядка 160 Nm на заднем колесе.
Характеристики КЭВ
Пиковая мощность до 2600 Вт электрической
Максимальный ток мотора 70А
Максимальный ток батареи 50А
Напряжение батареи 36,4~54.6V
Максимальный ток заряда 1C (~1 час)
CAN шина
DC-DC OUT: 13V 13W + 10W для модулей
Бортовой компьютер с FSTN экраном 240×128 2.8»
Bluetooth 4,0 на BMS или в инверторе
Структурная схема устройства
Чтобы обеспечить универсальность в подключении была выбрана CAN шина с бортовым напряжением 13V и отдельно силовая шина, с батарейным напряжением.
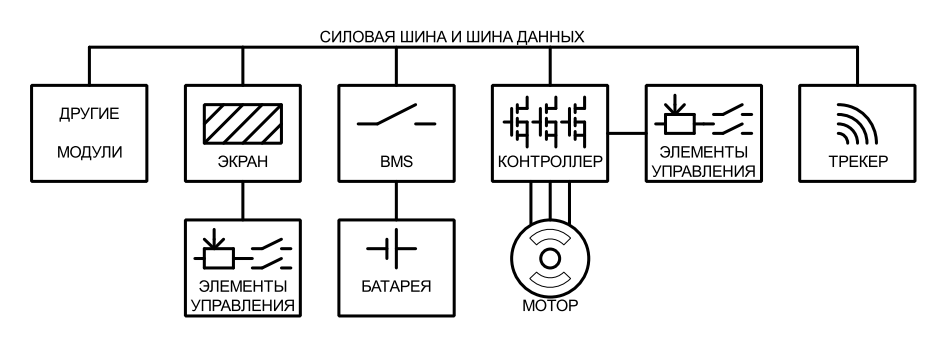
Сердцем всей системы является контроллер, управляющий мотором. Он преобразует постоянное напряжение с батареи в переменное с частотой до 1500 Гц. (Частота ШИМ выше — до 20 кГц) Сигналы управления поступают к нему либо напрямую, либо с бортового компьютера (экрана) через CAN шину. Также в нем встроен преобразователь Uбат. в 13V для обеспечения работы модулей.
Батарея подключается в общую сеть через BMS, как уже сказал выше, она следит за батареей, чтобы обеспечить ей долгий срок службы. Также имеет в себе преобразователь 13V для работы модулей.
Бортовой компьютер подключается по CAN шине c бортовым напряжением, отображает информацию которую получает с модулей, а также может вести запись данных на SD-карту.
Трекер также подключается по CAN + 13V и имеет в своем распоряжении небольшой АКБ для защиты от угона велосипеда, когда основной аккумулятор отсутствует.
Система поддерживает подключение до 4 батарей и контроллеров одновременно, например для управления четырёхколёсными ТС.
В заключении
В следующих статьях подробнее расскажу про разработку бортового компьютера, контроллера, системы управления аккумуляторной батареей и про то, как мы собирали батареи из элементов. Если будет интересно, отдельной статьей напишу про тестирование привода на диностенде или как в домашних условиях измерить КПД связки мотор + контроллер.
