[Из песочницы] OBD2 reader — диагностика автомобиля
При создании приложения мы столкнулись с множеством выборов, проблем и так далее, с которыми попробуем ознакомить вас в этой статье. Как оказалось с автомобилем можно вести диалог, причем довольно таки продуктивный. Естественно для того чтобы организовать общение с автомобилем необходимо «установить контакт», «задать правильный вопрос» и правильно понять «ответ», полученный от автомобиля. Соответственно статья и будет нацелена на то, чтобы доступным языком объяснить организацию диалога, а также рассказать вам какие ошибки могут встретиться вам на пути и как с ними бороться.
Выбор подключения
Изначально необходимо пояснить что для подключения к авто будет использоваться ELM327 адаптер. ELM327 — это микросхема, которая позволяет преобразовать протоколы, используемые в диагностических шинах автомобилей в протокол RS232, которым мы и будем передавать данные. За счет того что передача данных по протоколу RS232 происходит последовательно возникает первая проблема — скорости передачи данных, которую мы постараемся обойти в одном из следующих пунктов.
Существует несколько вариаций адаптера ELM327, которые классифицируются по способу передачи данных — Bluetooth, WIFI, USB. Исходя из того что целью разработки является мобильное устройство под операционной системой Android можно подобрать две наиболее подходящие версии ELM327, такие как Bluetooth и WIFI. Так как способ получения и обработки данных один, а отличаются они всего лишь вариантами подключения к адаптеру, то можно выбрать всего один, организовать при помощи него диалог, а после добавить остальные варианты подключения.
ELM327 1.5 vs ELM327 2.1
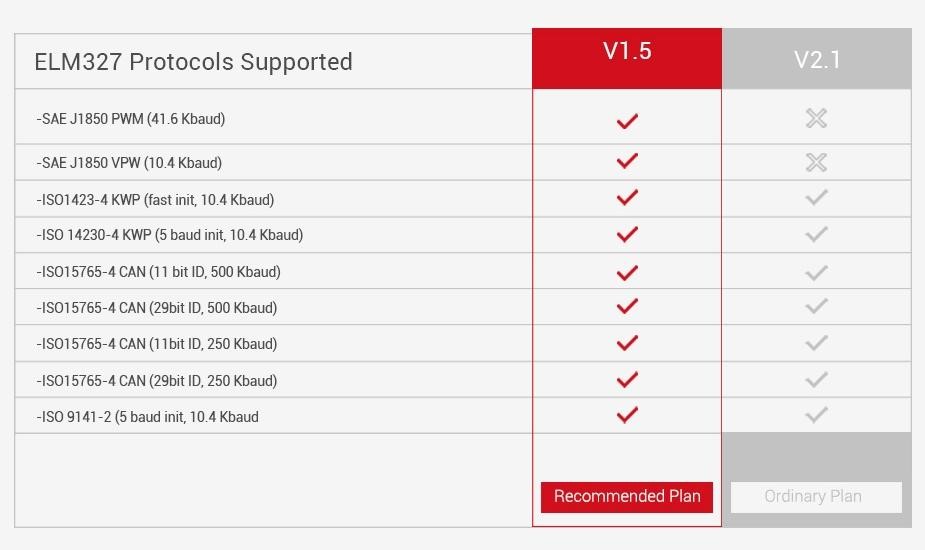
Одной из первых проблем, с которыми можно столкнуться стала проблема выбора непосредственно адаптера, в нашем случае Bluetooth. Оказывается если вам необходимо поддерживать все (по крайней мере большинство) автомобилей необходимо выбирать версию v1.5 вместо v2.1, что на самом то деле необходимо несколько раз уточнить при покупке адаптера, потому как продавцы пытаются выдать версию адаптера не за ту, которая есть на самом деле, т.к. они особо ничем не отличаются. На деле же в версии v2.1 отсутствует поддержка протоколов J1850 PWM и J1850 VPW, что говорит о том, что у вас не получится подключиться к автомобилям, которые используют эти протоколы.
Подключение
Подключение к адаптеру происходит в несколько этапов:
- Подключение к адаптеру (Bluetooth, WIFI)
- Отправка инициализационных команд (инициализационной строки)
Если с организацией подключения все понятно. Принцип работы такой же как и у любого Bluetooth/WIFI чата. То для того чтоб понять как отправлять инициализационную строку, необходимо изучить какие команды существуют, а также какие функции они выполняют.
AT Z [reset all]
Сброс настроек адаптера до заводского состояния.
AT L1–0
Включить/Отключить символы перевода строки.
AT E1–0
Echo on — off
AT H1–0
Headers on — off
AT AT0–1–2
Adaptive Timing Off — adaptive Timing Auto1 — adaptive Timing Auto2
AT ST FF
Установить таймаут на максимум.
AT D [set all to Default]
Сброс настроек в исходное, настроенное пользователем состояние.
AT DP [Describe the current Protocol]
Сканер способен самостоятельно определять протокол автомобиля, к которому он подключен.
AT IB10 [set the ISO Baud rate to 10400]
Команда устанавливает скорость обмена данных для ISO 9141–2 и
ISO 14230–4 10400
AT IB96 [ set the ISO Baud rate to 9600]
Команда устанавливает скорость обмена данных для ISO 9141–2 и
ISO 14230–4 9600 для протоколов 3,4,5.
AT SP h [ Set Protocol h]
Команда выбора протокола h, где h:
0 — Automatic;
1 — SAE J1850 PWM (41.6 Kbaud);
2 — SAE J1850 VPW (10.4 Kbaud);
3 — ISO 9141–2 (5 baud init, 10.4 Kbaud);
4 — ISO 14230–4 KWP (5 baud init, 10.4 Kbaud);
5 — ISO 14230–4 KWP (fast init, 10.4 Kbaud);
6 — ISO 15765–4 CAN (11 bit ID, 500 Kbaud);
7 — ISO 15765–4 CAN (29 bit ID, 500 Kbaud);
8 — ISO 15765–4 CAN (11 bit ID, 250 Kbaud);
9 — ISO 15765–4 CAN (29 bit ID, 250 Kbaud);
AT SP Ah [Set Protocol h with Auto]
Команда устанавливает по умолчанию протокол h, если подключение по протоколу h не удалось, тогда адаптер начинает автоматический подбор протокола.
Исходя из описанных выше команд, формируем инициализационную строку.
initializeCommands
= Arrays.asList("ATZ", "ATL0", "ATE1", "ATH1", "ATAT1", "ATSTFF", "ATDP", "ATSP0");
Желательно давать возможность пользователю сменять инициализационные команды, потому как для того чтобы подобрать «ключ» к некоторым авто необходимо выбрать более подходящие настройки адаптера. В нашем же случае используются настройки, которые походят для большинства стандартных протоколов.
Так же желательно обратить внимание на команду APSP0, таким образом мы устанавливаем по умолчанию автоматический подбор протокола, это может занять некоторое время.
Соответственно если пользователь знает какой у его авто протокол, то используя возможность смены протокола подключения он может поменять 0 на номер его протокола.
Считывание диагностических данных
Для считывания диагностических данных используются специальные команды PID«s.
PID (Parameter id«s — Бортовые диагностические идентификаторы параметров) — коды, которые используются для запроса показателей определенных датчиков автомобиля.
Основные пиды можно найти в Википедии, там полный набор основных команд, которые должны поддерживать все автомобили. Так же есть наборы команд для определенных марок и типов автомобилей, эти наборы предоставляются за отдельную плату. В нашем случае приложение заточено на базовую диагностику автомобилей соответственно мы используем базовый набор команд.
Также есть возможность получать текущие данные от автомобиля при этом команда получения данных от авто будет иметь вначале 01, указывая на то что мы хотим получить real data. Если же мы хотим получить сохраненные данные автомобиля, то вначале команды необходимо указать 02. Например, команда для получения текущей скорости автомобиля — 010D, а для получения сохраненной скорости — 020D.
Если внимательно посмотреть на то количество команд, которое предоставляется открытыми ресурсами, то можно как раз и заметить ту проблему, о которой я писал в самом начале, а именно проблема скорости ответа адаптера. Так как отправка и получение команд идет последовательно, то для того чтобы получить показания датчика на текущий момент времени необходимо дождаться ответа на все предыдущие команды. Соответственно если запрашивать на получение все команды, то большая вероятность того что обновление реальных данных будет происходить очень медленно. Но и эту проблему можно решить, если воспользоваться командами, которые отобразят только те команды, что существуют в автомобиле. Например:
0100 — PIDs supported [01 — 20]
0120 — PIDs supported [21 — 40]
0140 — PIDs supported [41 — 60]
0160 — PIDs supported [61 — 80]
0180 — PIDs supported [81 — A0]
01A0 — PIDs supported [A1 — C0]
Я продемонстрирую как определить какие датчики присутствуют в автомобиле при помощи одного из пидов. Например:
- 0100 \\ запрос
- BB1E3211 \\ ответ от авто
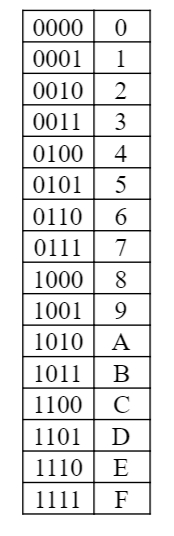
Переводим ответ от автомобиля в двоичную систему счисления
BB1E3211(16) > 10111011000111100011001000010001(2)
Используя следующую табличку можем определить какие пиды поддерживаются нашим автомобилем, начиная от 01 до 20:
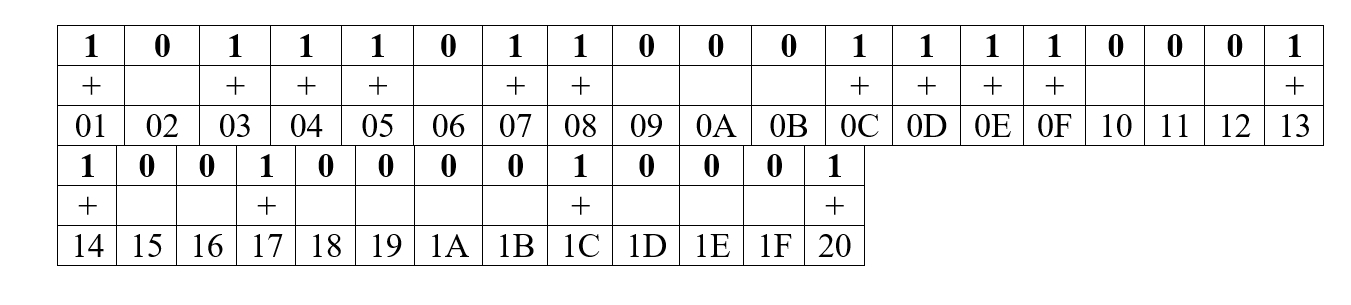
Исходя из получившихся данных можем определить, что наш автомобиль поддерживает следующие пиды:
01, 03, 04, 05, 07, 08, 0C, 0D, 0E, 0F, 13, 14, 17, 1C, 20
Теперь вместо отправки всех 32 команд и ожидания ответа на них, несмотря на то, что некоторые могут отсутствовать, мы будем использовать всего 15 команд. Но и это не предел так называемой оптимизации. Для того чтобы данные обновлялись еще быстрее советую запрашивать только данные о тех датчиках, которые отображаются на экране. Хотя это ограничивает некоторый функционал приложения. Например, запись истории.
Считывание и расшифровка ошибок автомобиля
Ошибки автомобиля тоже могут быть различными и для них тоже существуют отдельные команды. Например:
- 03 — Для отображения сохраненных кодов ошибок
- 0A — Для отображения постоянных кодов ошибок.
Так как и с остальными командами ошибки автомобиля приходят в закодированном виде, соответственно, как и в остальных командах их нужно раскодировать чтоб получить необходимую информацию. Приведу пример работы декодирования ошибки. Код:
private final static char[] dtcLetters = {'P', 'C', 'B', 'U'};
private final static char[] hexArray = "0123456789ABCDEF".toCharArray();
private void performCalculations(String fault) {
final String result = fault;
String workingData = "";
int startIndex = 0;
troubleCodesArray.clear();
try {
if (result.contains("43")) {
workingData = result.replaceAll("^43|[\r\n]43|[\r\n]", "");
} else if (result.contains("47")) {
workingData = result.replaceAll("^47|[\r\n]47|[\r\n]", "");
}
for(int begin=startIndex; begin < workingData.length(); begin += 4) {
String dtc = "";
byte b1 =
Utility.hexStringToByteArray(workingData.charAt(begin));
int ch1 = ((b1 & 0xC0) >> 6);
int ch2 = ((b1 & 0x30) >> 4);
dtc += dtcLetters[ch1];
dtc += hexArray[ch2];
dtc += workingData.substring(begin + 1, begin + 4);
if (dtc.equals("P0000")) {
continue;
}
troubleCodesArray.add(dtc);
}
} catch (Exception e) {
Log.e(TAG, "Error: " + e.getMessage());
}
}
А теперь пояснение.
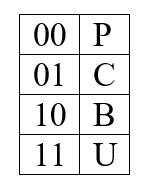
Исходя из полученного ответа мы можем получить код ошибки, для этого декодируем полученное сообщение используя следующие таблички.
Первый символ:
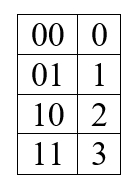
Второй символ:
3, 4, 5 символы формируются по этой таблице:
Исходя из этого можем попробовать разобрать следующий ответ 0001000000111110
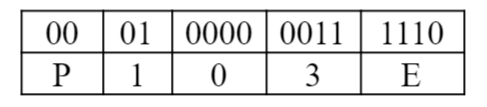
Код ошибки: P103E
Эпилог
На данном этапе мы разобрались в том, каким образом организовать диалог с адаптером, посылать ему команды, получать и расшифровывать его ответы. Это большая часть работы, если считать то, сколько времени уходит на изучение материала, но в то же время довольно таки интересная. За пределами этой статьи осталось множество проблем связанных с визуальным интерфейсом, а также множество дополнительных функций, таких как добавление новых пидов из файла, стандартный и расширенный способ подключения к адаптеру и построения графиков.
