[Из песочницы] Компактная ОС для ARM процессоров
«Кажется, что совершенство достигается не тогда, когда нечего более добавить, а тогда, когда нечего больше убрать.»
(Антуан де Сент-Экзюпери)
По теме изучения программирования встроенных систем, ОС реального времени, Ассемблера и С позвольте представить очень простую операционную систему StartOS.
Предназначение:
— если вам необходимо создать устройство, начинающее работать через 1–2 секунды после включения питания и способное реагировать на сигналы из внешнего мира в течение микросекунд;
— для быстрого создания систем управления объектами с выводом данных в Интернет;
— отработка идей, алгоритмов, изготовлении прототипов устройств;
— приобретение опыта программирования встроенных систем на языках C и Assembler;
— получение полного доступа к «железу» компьютерного устройства, например, для разработки самомодифицирующихся программ.
Некоторые свойства системы:
Время готовности после включения питания: < 1 сек
Объем двоичного кода программы: < 40 kB
Система занимает небольшой объем в верхних адресах ОЗУ, предоставляя пользователю стандартную загрузку программ в нижние адреса ОЗУ. Автостарт программы пользователя присутствует, если система обнаруживает на карте памяти файл START.BIN, то он запускается автоматически.
Основные функции системы:
Инициализация SoC (System on Chip, системы на чипе) и других внешних устройств. Загрузка программ пользователя в память и предоставление им интерфейса к системным функциям:
— работа с LCD в текстовом и графическом режимах (вывод текста, пикселей, линий, BMP картинок, сохранение / восстановление области экрана…);
— ввод координат X, Y пера с сенсорного экрана;
— работа с часами реального времени (RTC);
— чтение данных из аналого-цифровых преобразователей (ADC);
— чтение данных из цифровых портов;
— чтение / запись символов и строк в COM порт;
— вывод на широтно-импульсные модуляторы (ШИМ, PWM) и пьезодинамик;
— ввод-вывод пакетов сети Ethernet с использованием встроенного контроллера;
— чтение и запись файлов;
— сервер-клиент для Интернета;
— работа с видеокамерой.
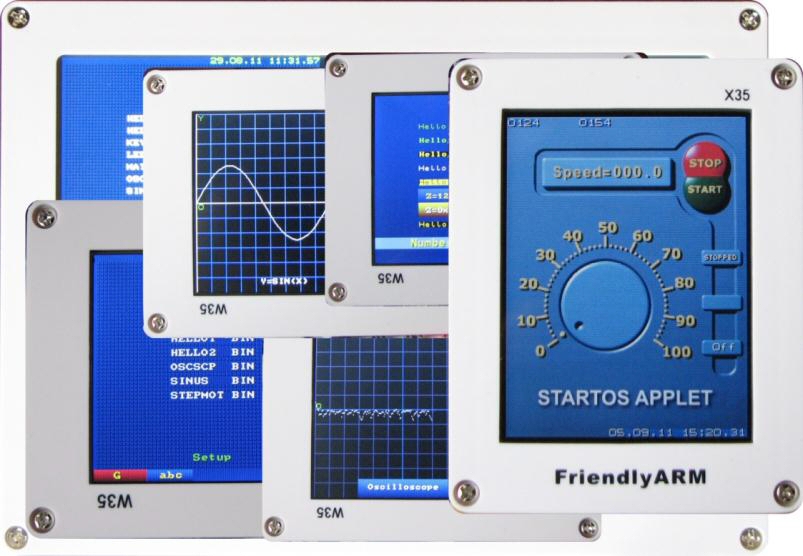
Система реализована на платах разработчиков фирмы Samsung или FriendlyARM с процессорами Samsung. На эти процессоры и платы имеется полная документация.
Итак, немного понагляднее. Лучше один раз увидеть, поэтому ссылка на видео:
Система немного посложнее, для ARM Cortex-A8:
И, конечно, код «Hello, World!» (с бегущей строкой к тому же):
char txt [ ]={"Hello"};
void Main(void)
{ int i;
for ( i = 134; i > 8; --i )
{
// X Y String
Print_String ( i, 150, "Hello, World!");
Print_String ( i, 170, txt);
Delay (20); // Delay 20 mS
}
Exit (); // Exit to OS
}
Это же на Ассемблере:
; Нужен только один файл, Hello.s. Двоичный код занимает ровно 100 Байт (!)
; номера системных вызовов взяты из файла StartOS.c
_Exit EQU 7 ; SysTrap _Exit
_Delay EQU 10 ; SysTrap _Delay
_Print_String EQU 122 ; SysTrap _Print_String
PRESERVE8 ; выравнивание до 8 Байтов
AREA INIT, CODE, READONLY ; инициал. секция, содержит код
ENTRY ; точка входа программы
;______ нужно для работы ОС __________
LDR r0, =0x33ffff08 ; просьба не редактировать
LDR r1, [r0,#0xE8] ;
STR r1, [r0] ;
; если Вам нужны прерывания, включите след. 4 строки
; MRS r0,cpsr
; BIC r0,r0,#0xDF
; ORR r1,r0,#0x13
; MSR cpsr_cxsf,r1
;___ Программа пользователя начинается здесь
; напечатаем строки текста...
; только-то и нужно поместить параметры в регистры и вызвать системные вызовы
;---- первый способ
LDR r2, text1 ; загружаем адрес текста 1 в регистр r2
MOV r1,#30 ; помещаем Y строки на экране в r1
MOV r0,#25 ; помщаем X на экране в r0
SWI _Print_String ; вызываем систему (Print_String(25,30,text1))
;---- Другой способ ----
ADR r2, text2 ; помещаем адрес строки text 2 в r2
MOV r1,#70 ; Y в r1
MOV r0,#25 ; X вr0
SWI _Print_String ; прерывание (Print_String(25,70,"Hello, ARM Assembler!"))
LDR r0, millis ; загружаем адрес ячейки с числом 5000 в r0
; в случае малых задержек (скажем, 500ms) можно так: MOV r0,#500
SWI _Delay ; вызов (Delay 5s)
SWI _Exit ; вызов выхода из программы в ОС, параметры не нужны
text1 DCD txt ; содержит адрес "Hello"
text2 DCB "Hello, ARM Assembler!",0 ; байты с нулем на конце
DCB 0,0 ; простое выравнивание до 32-бит адреса (*4 байта)
millis DCD 5000 ; равно 5000 мС или 5 секунд
DCB 0,0 ; выравнивание
txt DCB "Hello",0 ; содержит буквы H, e, l, l, o и 0
END ; и это - всё!
Предыстория создания системы такова. Автор отдает себе отчет, что написание «домашних» операционных систем — дело очень ответственное, рискованное (и не сулит создателям ничего, кроме критики). Но, как говорится, жизнь заставила. Так как же это получилось?
Дело было так: была найдена плата для разработчиков FriendlyARM Mini2440, очень дешевая и с большим выбором периферии. После применения контроллеров Atmel AVR в аппликаторе самоклеящихся этикеток, хотелось продолжить развитие последнего.
На тот момент (2010 год) плата Mini2440 стоила $80, примерно 2400 рублей, что было сравнимо со стоимостью датчиков в аппликаторе. Mini2440 была продемонстрирована руководителю одной довольно фирмы, который одобрил ее применение и заверил, что «в случае успеха в ее программировании, мы будем делать заказы». Успех в программировании подразумевал использование устройства в реальном времени, когда сигналы от датчиков обрабатываются за микросекунды, и не заставил себя долго ждать. Через 2 месяца программа, зашитая в NAND память успешно управляла шаговым двигателем и загружалась за 1 секунду после включения питания. Но тут, как это бывает, уже руководитель впал в ступор и просто замолчал. Пока он молчал, время шло, и автор решил использовать момент для некоторого развития.
Чтобы каждый раз не вставлять в проект код инициализации, было решено сделать это раз и навсегда, а прикладные программы загружать в память с SD карты непосредственно в память и оттуда запускать.
Существует подход, например, в ARM7 контроллерах STM32, когда программа пользователя компилируется вместе с фирменной библиотекой для работы с внешними устройствами. При этом, фирма не разглашает свой проприетарный исходный код, программа пользователя вызывает фирменные подпрограммы по адресам в памяти.
В то же время, автор знал «внутренности» операционных систем, таких как RT-11 фирмы DEC, у нас применялись на «Электронике-60», ДВК-2…4 и других. Еще были хорошо изучены BIOS IBM PC AT, MS DOS, Palm OS. Во всех этих системах применялся классический подход — применение программных прерываний. То есть, ОС расположена в верхних адресах памяти, а программа пользователя — с начала памяти и вызывала подпрограммы операционной системы, передавая номер программного прерывания в команде, собственно приводящей к прерыванию.
Таким образом, в разработанной системе применен механизм программных прерываний через команду SWI (SVC). Код системы находится в вехних адресах, а программы пользователя загружаются непосредственно в начало памяти и запускаются. Не будем сравнивать с существующими системами, достаточно сказать что система получилась с минимальным объемом, максимально возможным быстродействием и «жестким» реальным временем. Мы всегда очень точно можем знать, в какой момент времени какая команда выполняется и что происходит.
Название системы было задумано как система начального уровня, стартовая. После поиска в Google выбор пал на StartOS и это имя было зарегистрировано (печально, что некоторое время спустя некий клон Linux на некоторой части планеты был тоже переименован в StartOS).
По просьбам пользователей, в систему был добавлен TCP IP Stack и сделаны Сервер и Клиент. И еще добавлена программа для работы с видеокамерой. Кстати, после подачи питания на плату, секунды через две на экране уже появляется картинка с камеры.
Примеры программ представлены для работы почти со всеми внешними устройствами, смонтированными на плате. Создавать программы можно в средах ADS1.2 (Metrowerks CodeWarrior), IAR, Keil и других.
Документацию, примеры и прочее можно посмотреть здесь и здесь.
Так как плата разработчика FriendlyARM Mini2440 уже устарела (хотя и годится для многих проектов), автор портировал систему на более современную плату Mini210s. Кстати сказать, многие пользователи применяли StartOS на платах фирмы Samsung и успешно.
С уважением к сообществу,
Анатолий Бесплеменнов, инженер
P.S.: Прошу относиться к системам реального времени серьезно, например, если система, управляющая поездом «зависнет», сработает сторожевой таймер, она перезапустится и будет опять работать через 1 секунду. Не даром марсоход Curiosity бороздит просторы Марса под управлением RT системы uCOS фирмы Micrium.
