[Из песочницы] Как написать собственную программу для контроллера ROBO TX

Данный контроллер в основном предназначен для конструирования простых роботов с целью обучения. В комплекте идет графическая среда программирования, которая помогает заложить в него простые алгоритмы. Также ребята из русского представительства Fischertechnik подсказали, что имеется динамическая библиотека c API от создателей, которая предоставляет полный контроль и позволяет решать требуемые задачи более гибко уже путем разработки собственного софта, что как раз и произошло в моем случае.
Раньше, когда учился, я работал в ЦТПО «Интеллектуальные роботы» на базе института МГУПИ. Центр занимался подготовкой абитуриентов и школьников старших классов по специальностям робототехники. И Андрей Назарович Будняк, который возглавлял его в то время, предложил создать для этого контроллера программу, которая позволит управлять роботом в режиме реального времени. Также был интересен вариант управления этим контроллером через Bluetooth, чтобы получить своего рода пульт управления, как у радио-машинки.
Для решения задачи потребовалось изучить документацию, которая шла с библиотекой. К счастью, она достаточно информативная.
Выяснилось, что у контроллера два режима:
- Прошивка контроллера программой заранее с помощью софта разработчика.
- Подключение к контроллеру с компьютера через COM-порт и передача ему команд в реальном времени.
Нас интересует второй.
Он делится на несколько этапов:
- Поиск доступных COM-портов
- Подключение через определенный COM-порт
- Запуск Transfer Area (протокол общения контроллера с компьютером)
- Передача требуемых команд
- Завершение Transfer Area
- Закрытие COM-порта
Как оказалось, в случае с соединением через Bluetooth этот механизм тот же самый и на программном уровне не отличается вовсе. Единственная задача заранее поднять COM-порт через Bluetooth.
При разработке я использовал ООП подход. Для данного рода и масштаба задачи он не слишком необходим и в некоторых местах, я бы даже сказал, избыточен. Однако позволяет упорядоченно разложить структуру программы в виде компонентов для более простого понимания стороннему человеку. К тому же эта статья ориентирована на начинающих программистов, а им полезно привыкать именно к такому ключу.
Весь исходный код с комментариями выложен на Гитхабе в виде проекта на QT. Здесь опишу ключевые моменты по нему.
Постановка задачи
У контроллера 8 контактов для подключения 4 моторов (M1-M4). Наша задача при нажатии/отжимании клавиши подавать сигнал в контроллер, который включит/отключит определенный мотор.
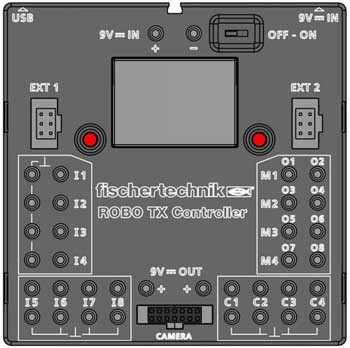
Нам понадобится список клавиш, в котором мы сохраним код клавиши и соответствующий номер мотора. Но это не все. Контакты у ROBO TX способны выдавать последовательность импульсов с широтно-импульсной модуляцией (ШИМ) для регулировки скорости вращения моторов. Диапазон регулировки от 1 до 512. Это означает, что чем меньше цифра, тем реже подается напряжение, которое всегда имеет одинаковое значение (12В). Еще есть направление вращения. И вдобавок контроллеры способны объединяться в группы с помощью шлейфов до 9 за раз (1 мастер и 8 дополнительных).
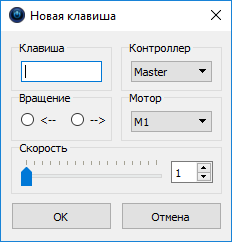
Резюмируем и для быстрого понимания одновременно смотрим на финальный интерфейс формы ввода параметров клавиши:
- Код клавиши
- Номер контроллера
- Номер мотора
- Направление вращения
- Скорость
Имея список, мы сможешь при нажатии клавиши с определенным кодом найти ее, определить, какие параметры передаем контроллеру, и отослать их. Вот и все в целом.
Реализация
Для хранения состояния кнопки в памяти я использовал следующую структуру:
struct Button {
QString name;
int code;
int controller;
int motor;
bool direction;
int speed;
};Метод из динамической библиотеки ftMscLib.dll, который передает параметры на конкретный мотор называется setOutPwmValues.
Принимает 4 параметра:
- Идентификатор соединения через COM-порт
- Номер контроллера (0 — основной, 1–8 подключаемые)
- Номер контакта (1–8), но в нашем случае это номер мотора (1–4) * 2 + направление (0–1)
- Плотность импульсов (0–512)
Весь функционал программы разбил на следующие компоненты, реализованные отдельными классами:
- LibLoader — отвечает за подключение динамической библиотеки ftMscLib.dll.
- Сonnector — отвечает за подключение к контроллеру.
- Сontroller — отвечает за управление моторами контроллера в зависимости от списка клавиш и инкапсулирует его.
- FileManager — отвечает за выгрузку/загрузку списка клавиш в файл/из файла.
Этапы взаимодействия с контроллером.
Возвращаясь к этапам, которые были перечислены в начале.
Connector::Connector() { //устанавливаем флаги в начальные значения
found = false;
connected = false;
started = false;
}
//поиск доступных портов
bool Connector::searchCom()
{
ports.clear();
char *portName = new char[256];
for (int i=0;i0 || debug;
} //подключение по определенному порту
bool Connector::openCom(char* comPortName) {
DWORD errCode = FTLIB_ERR_SUCCESS;
fthdl = libLoader.ftxOpenComDevice(comPortName, 38400, &errCode);
if (errCode==FTLIB_ERR_SUCCESS || debug) connected = true;
return connected;
}//запуск протокола общения с контроллером (Transfer Area) [необходимо уже иметь подключение через порт]
bool Connector::startTA() {
if (libLoader.ftxStartTransferArea(fthdl)==FTLIB_ERR_SUCCESS || debug) {
started = true;
}
return started;
}void Controller::exec(int buttonKey, bool pressed) //установить на контроллере состояние мотора в зависимости от конфигурации клавиши
{
if (connector.getStarted()) { //если Трансфер Арея запущена
for (int i=0;i//остановка протокола общения с контроллером (Transfer Area) [необходимо уже иметь подключение через порт]
bool Connector::stopTA() {
if (libLoader.ftxStopTransferArea(fthdl)==FTLIB_ERR_SUCCESS || debug) {
started = false;
}
return !started;
}//отключение открытого порта
bool Connector::closeCom() {
if (libLoader.ftxCloseDevice(fthdl)==FTLIB_ERR_SUCCESS || debug) {
started = false;
connected = false;
}
return !connected;
}Всю ключевую работу, в принципе, за нас делает библиотека ftMscLib.dll. Нам лишь важно это обернуть в удобную оболочку и приспособить для наших потребностей.
Данная разработка оказалась полезной на форуме роботов в 2012 году в соревновании «Трудная дорога». С помощью неё осуществлялся контроль роботом в реальном времени.
Все исходники, релиз и сама библиотека выложены здесь. При желании можете вносить свои изменения и доработки. Спасибо всем за внимание и удачного дня!
→ Немецкий Сайт Fischertechnik
→ Русский Сайт Fischertechnik
→ Сайт русского комьюнити Fischertechnik
→ Архив с библиотекой, документацией к ней и примерами с немецкого сайта Fischertechnik
Отдельное спасибо Андрею Назаровичу Будняку за помощь при составлении статьи.
Комментарии (7)
3 марта 2017 в 17:43 (комментарий был изменён)
0↑
↓
Посмотрел код.
Андрей, скажите, вы давно программируете?
Я могу конечно ошибаться, но если судить по коду, мне показалось, что у вас используется не ООП подход, а больше «Си с классами».
Если вам интересно, то можно обсудить сам код. Quardex
Quardex
3 марта 2017 в 18:04 (комментарий был изменён)
+1↑
↓
Вас смущает отсутствие наследований?3 марта 2017 в 18:11
0↑
↓
меня смущают глобальные переменные, отсутствие разделения ответственности, немного странные условия-
Quardex
3 марта 2017 в 18:15 (комментарий был изменён)
+1↑
↓
Дельные замечания. Скажу лишь, в целом так получилось, потому что с++ не мой основной язык, и это слишком простая задача, чтобы накручивать идеальный ООП. Я принял к сведению, на что обратить внимание в будущем, спасибо!-
Quardex
3 марта 2017 в 18:32 (комментарий был изменён)
0↑
↓
идеальное*
3 марта 2017 в 18:54
0↑
↓
Немножко непонятно про «режим реального времени»:
имеется ввиду возможность управления с помощью компьютерных кнопок, как бы сказать в режиме live — т.е. нажали — мотор закрутился, отпустили — остановился. Или режим исполнения программы в реальном времени?
По-моему тут первое, так?-
Quardex
3 марта 2017 в 18:59 (комментарий был изменён)
0↑
↓
Угу, первое.
