[Из песочницы] ЧПУ станок с расширенными функциональными возможностями
Хотел бы поведать вам о своем проекте, чтобы бы узнать мнение о нем. Обоснованная критика и пожелания приветствуются с распростертыми объятиями. Если появится интерес, напишу серию статей о том, как проект создавался, поделюсь крупицей своего опыта. Итак, начнем.Недавно пришла идея по созданию полностью открытого проекта универсальной 3-х координатной платформы, которая может выполнять функционал и 3d-принтера, и фрезерного станка для обработки пластика и многого другого. Платформа построена по модульному типу. Это означает, что в ней полностью взаимозаменяемые привода перемещения кареток и инструмент. Назвали мы эту штуку «Платформа RRaptor». В дальнейшем приведу ряд изображений и фотографий проектных моделей и того, что уже получилось реализовать. Проектная модель платформы. Выполнена в Autodesk Inventor
Проектная модель платформы. Выполнена в Autodesk Inventor
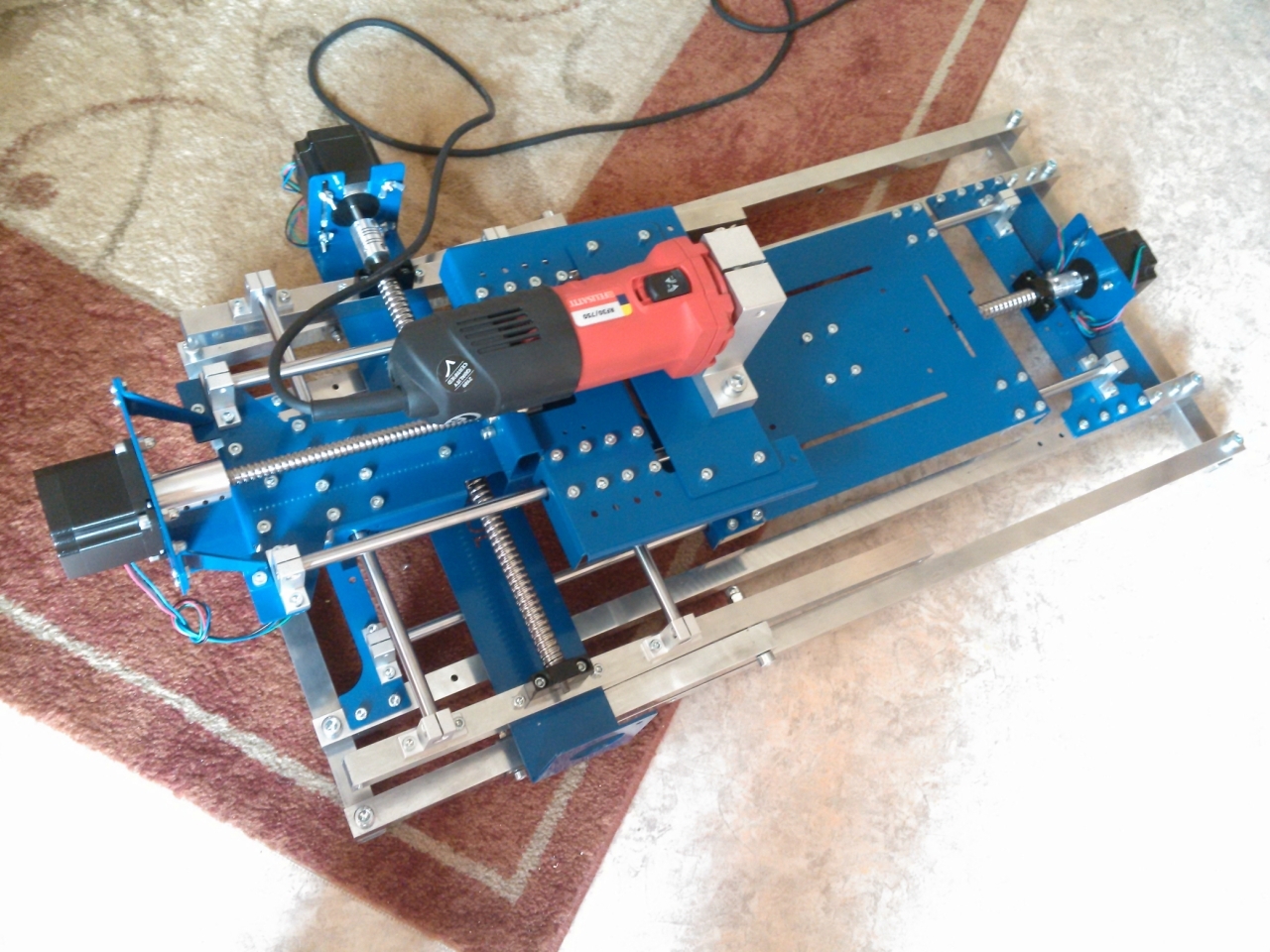
 А вот что получилось в реальности. И да. Винт на координате Y не закреплен
А вот что получилось в реальности. И да. Винт на координате Y не закреплен
Посмотрим, что означает модульность в контексте проекта. Например, мы хотим получить 3d-принтер: ставим соответствующие привода + печатающий блок (одновременно можно поставить 3 блока) — и готово. Можем печатать свои детальки. По разным причинам для печати на платформе используются передачи «шестерня-рейка» с шаговым двигателем.
 На моделе показан установленный привод «шестерня-рейка» на координату Y
На моделе показан установленный привод «шестерня-рейка» на координату Y
Или же нам понадобилось фрезеровать что-нибудь. Тогда установим привода типа «винт-гайка» с шаровым мотором NEMA23 и фрезу. Готово! Мы экспериментировали с различными винтами. Начиная от «колхоза», типа обычной шпильки и заканчивая высококачественными ШВП. Есть возможность установки на платформу различных типов винтов. Зависит от бюджета станка. Варианты фрезерного шпинделя тоже варьируется от стандартных бормашин до нашего варианта небольшого и компактного шпинделя для фрезеровки пластика (который еще только на стадии чертежей). На данный момент в наших тестах мы используем бормашину на алюминиевой стойке мощностью 650Вт.
 Вот вам и фрезерный станок для пластика
Вот вам и фрезерный станок для пластика
 Он еще и складывается
Он еще и складывается
Как уже сказал выше, хотим сделать проект открытым для сторонних разработчиков. Выложить все чертежи и патенты в открытый доступ, включая и программное обеспечение. Но об этом потом.
Следующая важная составляющая проекта — блок управления. Там расположена вся электронная начинка. Не вдаваясь в подробности, что там есть (как уже сказал, будет интерес — все распишу в отдельных статьях), отмечу основную его особенность. Этот блок управления может «рулить» сразу несколькими платформами одновременно. Это позволит создать небольшую инфраструктуру из устройств (точнее платформ), выполняющих различные функции, централизованно их контролируя (наверно громко сказано, но все же…). Блок тоже модульный. Его начинка варьируется. Можно добавлять различные интерфейсы коммуникации: wi-fi, Bluetooth, ethernet, и т. д. Что душе угодно.
 Фото корпуса блока управления
Фото корпуса блока управления
Софт — это отдельная эпопея. Писали мы его (и пишем) с чистого листа. Абсолютно все, начиная от алгоритмов вращения шаговиком, заканчивая приложением на андройда-смартфоне — наша работа. Я не говорю, что мы придумали что-то инновационное и новое. Хотя ключевые отличия от аналогов (например, прошивки Marlin) есть. Я лишь хочу акцентировать внимание на то, что отнеслись мы к проекту и идее в целом очень серьезно. И, надеюсь, что сможем до конца реализовать. А именно — серийно выпускать такие платформы.
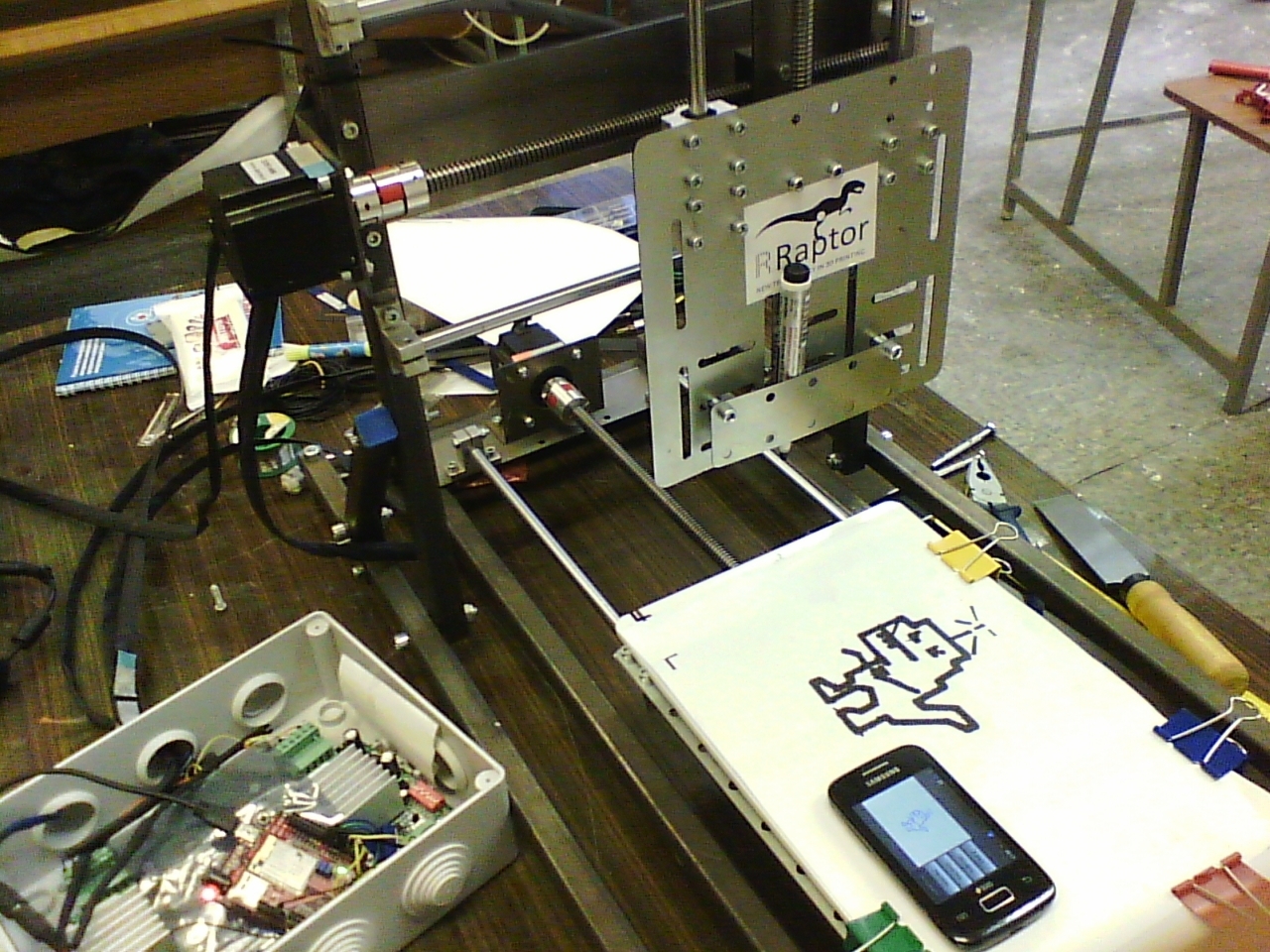 Это наш первый прототип. Сделали на его базе плоттер для самых первых тестов
Это наш первый прототип. Сделали на его базе плоттер для самых первых тестов
Хотя до серийного производства пока еще надо дорасти и доработать как недостатки в механике, так и в программном обеспечении. Тем не менее небольшой опыт у нас уже есть.
 Первая серия на 5 штук
Первая серия на 5 штук
Надеюсь (точнее уверен), ваши отзывы, мнения и замечания нам помогут. К сожалению, описать и показать многие детали проекта в одной статье просто нереально. Но надо с чего-то начинать.
Спасибо за внимание.
