[Из песочницы] Астротрекер: мой опыт
Дабы совместить два своих любимых хобби: фотографию и астрономию, решил попробовать себя в астрофотографии. Уж очень глубокое впечатление на меня оказывают фотографии Млечного Пути с огромными россыпями звезд. Тем более что каждое лето бываю на Кавказе, а небо там идеально подходит для наблюдений. Для качественной съемки звездного неба не обойтись без астротрекера. Для чего он нужен не вижу необходимости повторять, т.к. здесь уже было несколько статей на эту тему. Поэтому просто хотел бы поделиться своим опытом создания данного устройства, его настройки и использования. Саму конструкцию я почерпнул из данной статьи, немного упростил её, и оснастил собственными доработками. Подробности под катом.

Сразу скажу, что в отличие от ув. kuzmuk (автор оригинальной статьи) процесс изготовления астротрекера занял у меня не два вечера, и даже не две недели, а целых два месяца. Но столь длительный срок связан, прежде всего, с длительной доставкой некоторых комплектующих из Китая. При создании трекера я ставил перед собой две главные цели: максимальная простота конструкции и максимальная точность трекинга итоговым устройством.
1. Привод
В оригинальной статье в приводе используется шаговый двигатель с драйвером и Arduino в качестве контроллера. Но так как до этого проекта я не имел никакого опыта программирования Arduino, я решил использовать простой двигатель постоянного тока (ДПТ). Тем более что я встречал в интернете множество конструкций трекеров именно с ДПТ. Я заказал на Ebay моторчик на 5В, со встроенным редуктором, с итоговой скоростью около 8 об/мин. При условии стабилизированного питания я ожидал получить постоянную выходную скорость, хотя я и понимал что скорость вращения ДПТ зависит от нагрузки.

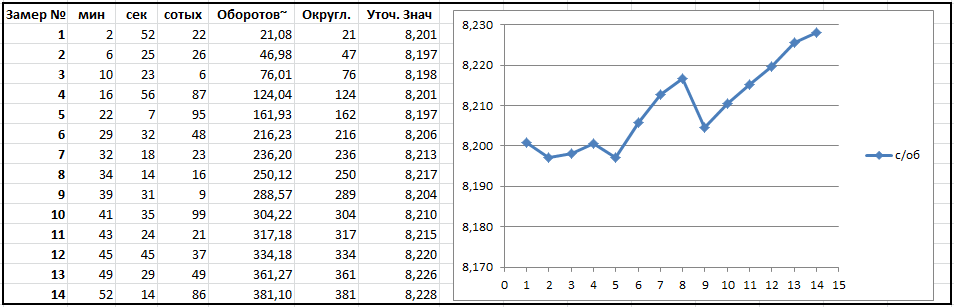
Каково же было мое разочарование. Дело в том, что даже без нагрузки, с питанием от лабораторного источника, скорость двигателя не была стабильной. На рисунке ниже видно как «плавают» обороты с течением времени. У меня не было точного инструмента для определения скорости, поэтому я использовал метод интервальных измерений с уточнением. Результат был неприемлем.
Не оставалось другого выхода кроме как использование двигателя с синхронной скоростью, коим является шаговик 28BYJ-48. Беглое изучение Arduino показало что никаких сложностей нет, и вся программа сводится к попеременному включению четырех фаз двигателя с определенной задержкой. Скорость, как и ожидалось, в такой системе была очень стабильной.

Кроме того, использование Arduino давала возможность очень точной настройки скорости вращения, а значит уменьшались требования к точности изготовления передаточного механизма.
2. Поворотный механизм и передача
Я не счел нужным использовать лазерную резку для изготовления основания, т. к. никаких ограничений на размер будущего трекера я не накладывал. Напротив, чем больше по размером основание, тем выше точность за счет меньшего люфта в оси. За основание я взял две фанерные разделочные доски из Ашана. Навесы выбрал с минимальным зазором (в последствии зазор еще был скомпенсирован молотком) и расположил по краям основания. Чем больше расстояние между навесами, тем точнее работа механизма. Шпильку согнул по методу, описанному в исходной статье.

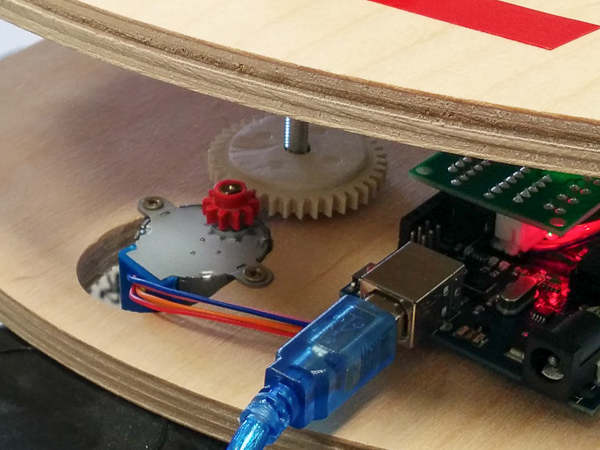
Шестерни также не стал изготавливать на заказ, а взял из старого советского лунохода с передаточным числом ~4. В моем случае оно составило 3,8. В большую шестерню посадил на термоклей гайку.

Итоговый вид передачи:
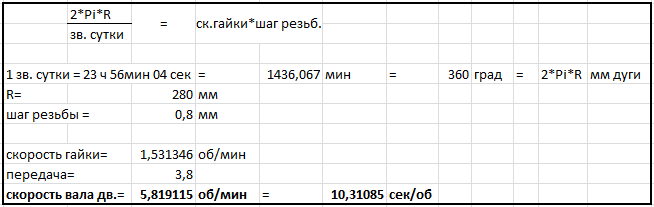
3. Расчет скорости вращения
Расчет необходимой скорости вращения вала двигателя не составляет особого труда, если вы понимаете основные принципы. Все базируется на одном уравнении. Для удобства я использовал Excel:
4. Калибровка
Я понимал, что при изготовлении идеально точно выдержать все размеры трекера не получится при всем желании. Ошибка будет в любом случае, поэтому я заранее разработал методику по её компенсации. Заключается она в лазерной калибровке трекера: на проворачивающуюся часть устанавливается лазер и светит на экран, расположенный на заведомо известном расстоянии от оси трекера. Так, замерив время включения и выключения трекера, можно рассчитать какой путь должна пройти точка лазера на экране и соотнести его с реально измеренным рулеткой. Чем дальше находится экран и дольше работает трекер, тем точнее результат.

Надо признать даже без калибровки ошибка трекинга составляла всего около 0,8%. После подстройки времени паузы между коммутацией фаз шаговика ошибка составила около 0,2%. В таблице ниже видно, как уменьшается ошибка с увеличением времени паузы.

Программу для Arduino оставил максимально простой. Все что она делает — это коммутирует фазы шаговика с паузой, определенной выше. Вращение начинается сразу после подачи питания. Также коммутируется одновременно только одна фаза — момент двигателя в этом случае меньше (его и так с избытком), но батарейки в живут 2 раза дольше.
#define IN1 8
#define IN2 9
#define IN3 10
#define IN4 11
int time_del=5000; //микросекунд
void setup() {
pinMode(IN1, OUTPUT);
pinMode(IN2, OUTPUT);
pinMode(IN3, OUTPUT);
pinMode(IN4, OUTPUT);
}
void loop() {
digitalWrite(IN1, HIGH);
digitalWrite(IN2, LOW);
digitalWrite(IN3, LOW);
digitalWrite(IN4, LOW);
delayMicroseconds(time_del);
digitalWrite(IN1, LOW);
digitalWrite(IN2, HIGH);
digitalWrite(IN3, LOW);
digitalWrite(IN4, LOW);
delayMicroseconds(time_del);
digitalWrite(IN1, LOW);
digitalWrite(IN2, LOW);
digitalWrite(IN3, HIGH);
digitalWrite(IN4, LOW);
delayMicroseconds(time_del);
digitalWrite(IN1, LOW);
digitalWrite(IN2, LOW);
digitalWrite(IN3, LOW);
digitalWrite(IN4, HIGH);
delayMicroseconds(time_del);
}
После настройки заменил плату на Arduino Micro, которая отлично встала на плате драйвера двигателя, и поместил все в пластиковый корпус. В качестве источника питания использовал PowerBank на 2300 мАч (хватает на ~ 5 часов трекинга).

5. Лазерный прицел
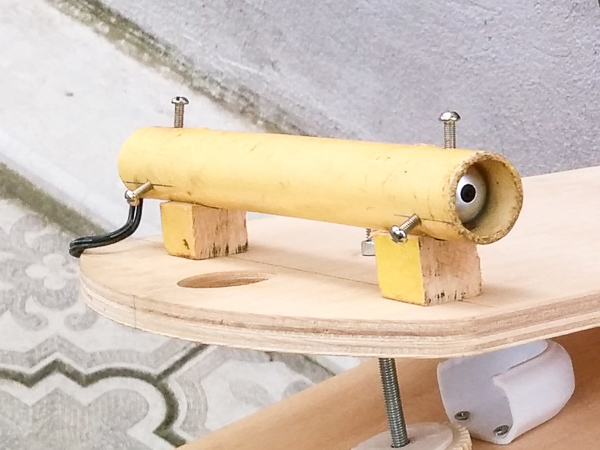
Имея некоторый опыт астрономических наблюдений я понимал, что большой проблемой будет наводка трекера на Полярную звезду. На глаз выставлять ось неприемлемо, а устанавливать искатель полюса не хотелось ввиду его их стоимости. Поэтому решил изготовить самодельный лазерный прицел. Для этого заказал вот такой зеленый лазер с длиной волны 532 нм и мощностью 5мВт. Судя по информации в интернете его луч должен был быть отчетливо виден в темноте.
Чтобы иметь возможность тонкой подстройки направления луча лазера, в качестве крепления использовал пластиковую трубку большего диаметра с винтовой регулировкой:
При этом процесс калибровки соосности луча лазера с осью трекера выглядел следующим образом: измеряется расстояние между осью лазера и осью трекера, далее чертится окружность с радиусом равным изменённому значению. Окружность (назовём её мишень) помещается на некотором расстоянии от трекера и вручную изменяется положение подвижной части трекера. Если оси параллельны, то луч лазер должен идти точно по окружности. И опять же: чем больше расстояние между трекером и мишенью, тем точнее результат.
По поводу видимости в темноте, надо сказать, китайцы не обманули:

6. Прочее
Для съемки использовался фотоаппарат Nikon D7000 с объективом Sigma 17-50 f2.8. Для установки его на трекере заказал на Ebay 3D головку, а чтобы избежать тряски при спуска затвора — проводной пульт управления.
Итоговый вид конструкции:

Питание лазера осуществляется от того же PowerBank через тумблер в блоке управления.
Отдельно несколько слов стоит сказать про штатив. У меня самодельный, легко справляется с нагрузкой в несколько килограмм, но явно не хватает точной регулировки. Причем именно точной, грубая в общем-то совсем не нужна, т.к. полярная звезда всегда находится в одной точке небосвода. Можно изначально рассчитать длину ножек штатива так, чтобы он давал наклон трекера ~45 градусов, а далее с помощью точной регулировки навестись на звезду.
Для предварительного планирования съемки очень помогает программа виртуальный планетарий Stellarium. Можно задать координаты и время и посмотреть в какой точке неба в этот момент будет центр Млечного Пути и другие объекты и не помешает ли Луна.
Также вот этот сайт очень полезен при выборе места съемки. Он представляет собой карту светового загрязнения. Выбирайте наименее засвеченные области.
7. Результаты
Выдержка на фото 5-7 мин, диафрагма 4, ИСО 400.




На последнем фото с Туманностью Андромеды виден небольшой смаз, но я думаю это из-за сбившейся наводки на полюс мира.
Съемку проводил ясной ночью, вдали от городской засветки и при отсутствии Луны. В таких условиях глаза быстро привыкают к темноте и плоскость нашей галактики можно видеть невооруженным глазом. Результатом остался более чем доволен. А сам процесс подготовки, наблюдения и съемки приносит истинное наслаждение.
