Робот-пылесос Neato XV Signature Pro: ориентируется дома не хуже хозяев
Семейство роботов-пылесосов компании Neato имеет уникальную особенность — эти роботы оснащены сканирующим лазерным дальномером инфракрасного диапазона (лидаром). Данные, полученные с лидара, используются для дистанционного обнаружения препятствий, для составления карты убираемого помещения и для определения положения робота.
Содержание:
Паспортные характеристики, комплект поставки и цена
Кинематическая система
Два ведущих колеса и четыре поддерживающих ролика
Способ сбора пыли
Инерционное перемещение и вакуумная фильтрация
Пылесборник
Емкость 0,6 л
Основная щетка
Одна: ворс + скребки или только скребки, ширина 238 мм
Боковые щетки
Отсутствуют
Дополнительно
Нет
Режимы очистки
Автоматический, локальный, по расписанию по дням недели
Эффективность очистки
Нет данных
Уровень шума
Нет данных
Датчики препятствий
Сканирующий лазерный дальномер инфракрасного диапазона (лидар), механический передний/боковой бампер, ИК-датчики перепада высоты, предположительно ИК-датчик на бампере
Датчики ориентации
Лидар
Управление на корпусе
Механические кнопки
Дистанционное управление
Отсутствует
Оповещение
Графический ЖК-дисплей с подсветкой, светодиодный индикатор состояния, звуковые сигналы
Время автономной работы
Нет данных
Время зарядки
2–3 часа
Способ зарядки
На зарядной базе с автоматическим возвратом или прямая зарядка от БП
Батарея
Ni-MH 7,2 В, 3200 мА·ч (23 Вт·ч), 2 шт.
Потребляемая мощность
Нет данных
Масса
Нет данных
Размеры (диаметр×высота)
Нет данных
Особенности
Создание карты и выбор оптимального маршрута уборки, магнитный ограничитель движения
Комплект поставки*
Пылесос
Зарядная база
Блок питания
Кабель питания
Краткое руководство пользователя
Полное руководство пользователя
CD-ROM с руководством пользователя и исходными текстами ПО
Фильтр «High-Performance», 2 шт, один установлен
Щетка с ворсом и скребками, установлена
Щетка только со скребками
Магнитная полоса — ограничитель движения
*Комплект поставки лучше уточнять перед покупкой.
Ссылка на сайт производителя
www.neatorobotics.com
Средняя цена по данным Яндекс.Маркет
T-10395939
Предложения по данным Яндекс.Маркет
L-10395939–10
Внешний вид
 Робот нам достался не новым, а слегка (как минимум один раз) бывшем в употреблении. В итоге мы получили возможность оценить изменение внешнего вида после какого-то срока эксплуатации. Согласно визуальной оценке царапины на корпусе присутствовали, но их заметность невелика. Правда, контрольная панель была прикрыта фабричной защитной пленой, а именно она вызывает наибольшие сомнения относительно устойчивости к повреждениям. Геометрией корпуса этот пылесос сильно отличается от классических стандартов.
Робот нам достался не новым, а слегка (как минимум один раз) бывшем в употреблении. В итоге мы получили возможность оценить изменение внешнего вида после какого-то срока эксплуатации. Согласно визуальной оценке царапины на корпусе присутствовали, но их заметность невелика. Правда, контрольная панель была прикрыта фабричной защитной пленой, а именно она вызывает наибольшие сомнения относительно устойчивости к повреждениям. Геометрией корпуса этот пылесос сильно отличается от классических стандартов.
 В плане задняя часть корпуса традиционно круглая (вернее полукруглая), но спереди корпус переходит в прямоугольную часть без изменения ширины. Такая геометрия продиктована отсутствием боковых щеточек, из-за чего основную щетку потребовалось сдвинуть максимально вперед и расширить почти до габаритов — только так можно рассчитывать хоть на какое-то качество уборки в углах помещения. В итоге ширина основной (и единственной) щетки составила целых 238 мм, от щетки до края корпуса остался промежуток в 40 мм, а спереди — порядка 25 мм. Робот несколько угловатый, что снизит вероятность того, что он будет застревать под препятствиями с небольшим просветом, впрочем, основную роль тут будут играть фирменная система обнаружения препятствий.
В плане задняя часть корпуса традиционно круглая (вернее полукруглая), но спереди корпус переходит в прямоугольную часть без изменения ширины. Такая геометрия продиктована отсутствием боковых щеточек, из-за чего основную щетку потребовалось сдвинуть максимально вперед и расширить почти до габаритов — только так можно рассчитывать хоть на какое-то качество уборки в углах помещения. В итоге ширина основной (и единственной) щетки составила целых 238 мм, от щетки до края корпуса остался промежуток в 40 мм, а спереди — порядка 25 мм. Робот несколько угловатый, что снизит вероятность того, что он будет застревать под препятствиями с небольшим просветом, впрочем, основную роль тут будут играть фирменная система обнаружения препятствий.


Небольшой скос спереди снизу помогает роботу преодолевать препятствия. Материал корпуса — это в основном черный (с небольшой вариацией оттенка) пластик с матовой поверхностью и, видимо, без покрытия, что в итоге уменьшает заметность повреждений. Исключение — верхняя передняя часть отсека пылесборника, крышка пылесборника и башенка лидара — они сверху имеют темно-серебристое покрытие. Сверху слева от указанной башенки располагается контрольная панель с механическими кнопками: три мелкие для навигации по меню, одна побольше функциональная и большая серебристая запуска; с относительно большим графическим монохромным ЖК-дисплеем и светодиодным — оранжевым/зеленым — индикатором состояния, огибающим кнопку запуска. Прикрыта контрольная панель вставкой из прозрачного пластика, которая легко царапается и на которой заметны как царапины, так и следы от пальцев. В передней части корпуса с заходом на боковые поверхности установлен механический бампер.
 В переднем правом углу этого бампера расположен, по всей видимости, одинокий ИК-датчик препятствий. В задней части корпуса находятся «выхлопная» решетка, контактные площадки для зарядки на базе и два прикрытых резиновыми заглушками разъема.
В переднем правом углу этого бампера расположен, по всей видимости, одинокий ИК-датчик препятствий. В задней части корпуса находятся «выхлопная» решетка, контактные площадки для зарядки на базе и два прикрытых резиновыми заглушками разъема.
 Один — коаксиальный — разъем используется для зарядки пылесоса непосредственно от блока питания, второй — Mini-USB — задействуется при обновлении встроенного ПО. Перевернув пылесос вверх днищем, мы увидим два ИК-датчика перепада высоты (окошки в углах спереди), отсек с щеткой, две крышки отсеков аккумуляторов, два ведущих колеса на подпружиненных рычагах, и четыре поддерживающих ролика — два поменьше в передней части и два побольше в задней части.
Один — коаксиальный — разъем используется для зарядки пылесоса непосредственно от блока питания, второй — Mini-USB — задействуется при обновлении встроенного ПО. Перевернув пылесос вверх днищем, мы увидим два ИК-датчика перепада высоты (окошки в углах спереди), отсек с щеткой, две крышки отсеков аккумуляторов, два ведущих колеса на подпружиненных рычагах, и четыре поддерживающих ролика — два поменьше в передней части и два побольше в задней части.
 База имеет небольшие габариты и, несмотря на вложенный внутрь блок питания, вес базы невелик. Это, а также «вертикальная» ориентация корпуса базы не предполагают ее установку без поддерживающей сзади вертикальной стенки помещения.
База имеет небольшие габариты и, несмотря на вложенный внутрь блок питания, вес базы невелик. Это, а также «вертикальная» ориентация корпуса базы не предполагают ее установку без поддерживающей сзади вертикальной стенки помещения.
 Сверху на корпусе базы есть ниша, образующая ручку для переноски и — там же — серебристая планка-фиксатор задней крышки. На днище базы наклеены три резиновые противоскользящие площадки.
Сверху на корпусе базы есть ниша, образующая ручку для переноски и — там же — серебристая планка-фиксатор задней крышки. На днище базы наклеены три резиновые противоскользящие площадки.
 Это совершенно нелишне с учетом того, что в процессе уборки робот может касаться (мягко) базы. На передней панели базы — большое окошко из тонированного полупрозрачного пластика, за которым, видимо, находятся ИК-маячки парковки. Ниже — широкие подпружиненные контактные площадки. Они плюс длинные контактные полоски на самом роботе гарантируют надежный контакт робота с базой даже при слегка кривоватой парковке.
Это совершенно нелишне с учетом того, что в процессе уборки робот может касаться (мягко) базы. На передней панели базы — большое окошко из тонированного полупрозрачного пластика, за которым, видимо, находятся ИК-маячки парковки. Ниже — широкие подпружиненные контактные площадки. Они плюс длинные контактные полоски на самом роботе гарантируют надежный контакт робота с базой даже при слегка кривоватой парковке.
 Сняв заднюю крышку базы, можно увидеть, что внешний блок питания устанавливается в специальную нишу (единственным верным способом), при этом сетевой кабель питания пропускается через вырезы на правом или на левом боку.
Сняв заднюю крышку базы, можно увидеть, что внешний блок питания устанавливается в специальную нишу (единственным верным способом), при этом сетевой кабель питания пропускается через вырезы на правом или на левом боку.
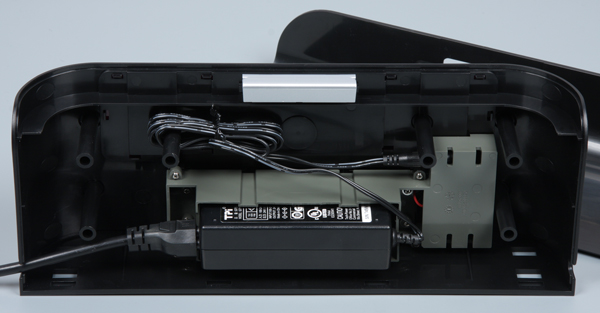 Излишки кабеля (высоковольтного и низковольтного) укладываются между штырьками. Длина сетевого шнура составляет небольшие 100 см. У внешнего БП есть свои преимущества — его в принципе можно легко заменить, но, учитывая жестко заданные размеры ниши и характеристики штатного БП (24 В и 2 А на выходе), менять, скорее всего, придется на оригинальный.
Излишки кабеля (высоковольтного и низковольтного) укладываются между штырьками. Длина сетевого шнура составляет небольшие 100 см. У внешнего БП есть свои преимущества — его в принципе можно легко заменить, но, учитывая жестко заданные размеры ниши и характеристики штатного БП (24 В и 2 А на выходе), менять, скорее всего, придется на оригинальный.
 Из дополнительных аксессуаров и расходных материалов в комплект поставки вошли запасной фильтр (тоже типа High-Performance с увеличенной относительно фильтра Standard поверхностью) для пылесборника, альтернативная лопастная (без ворса) щетка и магнитная лента-ограничитель длиной 2 м, а также документация — краткое руководство (без русского вариант текста, но картинки более-менее понятны и без него), CD-ROM с полным руководством пользователя (файл PDF, тоже без русского) и исходными текстами части ПО и брошюра руководства пользователя теперь уже на русском языке.
Из дополнительных аксессуаров и расходных материалов в комплект поставки вошли запасной фильтр (тоже типа High-Performance с увеличенной относительно фильтра Standard поверхностью) для пылесборника, альтернативная лопастная (без ворса) щетка и магнитная лента-ограничитель длиной 2 м, а также документация — краткое руководство (без русского вариант текста, но картинки более-менее понятны и без него), CD-ROM с полным руководством пользователя (файл PDF, тоже без русского) и исходными текстами части ПО и брошюра руководства пользователя теперь уже на русском языке.
 Перевод на русский язык не отличается высоким качеством, но в целом по смыслу более-менее соответствует оригиналу. Упакован пылесос в не очень большую красочно оформленную коробку с пластиковой ручкой и отсеками, сформированными из экологически безопасного картона.
Перевод на русский язык не отличается высоким качеством, но в целом по смыслу более-менее соответствует оригиналу. Упакован пылесос в не очень большую красочно оформленную коробку с пластиковой ручкой и отсеками, сформированными из экологически безопасного картона.
 Функционирование
О функциях пылесоса можно прочитать в прилагаемом руководстве пользователя. Тем, кто только присматривается к подобной технике, можно порекомендовать загрузить руководство с одного из локализованных сайтов компании-производителя, и внимательно его изучить (вот только нет ни официального русского сайта, ни официального русского руководства).
Функционирование
О функциях пылесоса можно прочитать в прилагаемом руководстве пользователя. Тем, кто только присматривается к подобной технике, можно порекомендовать загрузить руководство с одного из локализованных сайтов компании-производителя, и внимательно его изучить (вот только нет ни официального русского сайта, ни официального русского руководства).
Самое интересное в этом роботе — это его уникальная система ориентации, основой которой является сканирующий лазерный дальномер инфракрасного диапазона (лидар). Лидар установлен в башенке на верхней панели в задней части робота. Через горизонтальные «бойницы» этой башенки можно разглядеть объективы излучающего лазерного диода и фотоприемника.
 Рабочая длина волны равна 785 нм, что можно охарактеризовать как ближний ИК-диапазон. Пиковая мощность лазерного излучения составляет 2,1 мВт, длительность импульсов 200 мкс, частота импульсов 1,8 кГц, диаметр пучка 2,3 мм. При желании можно рассчитать энергетические характеристики этого излучения, но наверняка они, даже без учета вращения излучателя, окажутся ниже предельно допустимого уровня лазерного излучения, то есть лидар в этом роботе не представляет никакой опасности для человека или домашних питомцев. Кстати о вращении — лазерный диод и фотоприемник установлены на роторе, который вращается в горизонтальной плоскости, и именно это позволяет роботу получать данные о расстоянии до препятствий с обзором в 360 градусов по горизонтали. То есть роботу нет необходимости подъезжать к препятствию вплотную, чтобы определить его наличие. Кроме того, дистанционное определение препятствий и их геометрии позволяет роботу составлять карту помещения и отслеживать свое собственное местоположение. Робот «знает», где он находится, где находится базовая станция (при запуске с нее), где он уже убрал, где нужно убрать и где в периметре территории еще остаются необследованные участки. Побочным следствием такого дистанционного обнаружения препятствий является то, что фактически препятствием для робота является все, что отражает излучение лазера — любая даже самая легка занавеска или свешивающееся с кровати покрывало. По идее меняющаяся обстановка — перемещение предметов мебели или расхаживающие люди и не люди — могут сбивать ориентирование робота, но на практике ходить вокруг робота не возбраняется, видимо, есть какой-то алгоритм отбрасывания непостоянных во времени преград. Также нужно учитывать то, что лидар работает в плоскости на определенной высоте от пола, то есть все что ниже или выше робот «не видит». Впрочем, на случай «ниже» робот оснащен механическим бампером и ИК-датчиком препятствий на нем. Остается случай «выше» — этот случай в теории может приводить к некоторым проблемам, так как крыша башенки находится явно выше плоскости, в которой работает лидар.
Рабочая длина волны равна 785 нм, что можно охарактеризовать как ближний ИК-диапазон. Пиковая мощность лазерного излучения составляет 2,1 мВт, длительность импульсов 200 мкс, частота импульсов 1,8 кГц, диаметр пучка 2,3 мм. При желании можно рассчитать энергетические характеристики этого излучения, но наверняка они, даже без учета вращения излучателя, окажутся ниже предельно допустимого уровня лазерного излучения, то есть лидар в этом роботе не представляет никакой опасности для человека или домашних питомцев. Кстати о вращении — лазерный диод и фотоприемник установлены на роторе, который вращается в горизонтальной плоскости, и именно это позволяет роботу получать данные о расстоянии до препятствий с обзором в 360 градусов по горизонтали. То есть роботу нет необходимости подъезжать к препятствию вплотную, чтобы определить его наличие. Кроме того, дистанционное определение препятствий и их геометрии позволяет роботу составлять карту помещения и отслеживать свое собственное местоположение. Робот «знает», где он находится, где находится базовая станция (при запуске с нее), где он уже убрал, где нужно убрать и где в периметре территории еще остаются необследованные участки. Побочным следствием такого дистанционного обнаружения препятствий является то, что фактически препятствием для робота является все, что отражает излучение лазера — любая даже самая легка занавеска или свешивающееся с кровати покрывало. По идее меняющаяся обстановка — перемещение предметов мебели или расхаживающие люди и не люди — могут сбивать ориентирование робота, но на практике ходить вокруг робота не возбраняется, видимо, есть какой-то алгоритм отбрасывания непостоянных во времени преград. Также нужно учитывать то, что лидар работает в плоскости на определенной высоте от пола, то есть все что ниже или выше робот «не видит». Впрочем, на случай «ниже» робот оснащен механическим бампером и ИК-датчиком препятствий на нем. Остается случай «выше» — этот случай в теории может приводить к некоторым проблемам, так как крыша башенки находится явно выше плоскости, в которой работает лидар.
Кинематическая схема «классическая»: оси ведущих колес расположены на одном диаметре окружности корпуса. Окружности, правда, которую можно вписать в корпус, так как он на самом деле имеет подковообразную форму. Робот может совершать разворот на месте, но выступающая вперед прямоугольная часть не может не затруднять маневрирование. Все поддерживающие ролики в данном случае жестко закреплены, но движения робота это не должно сильно ограничивать, так как ролики изготовлены из гладкой и относительно скользкой пластмассы. К тому же основной вес всегда приходится на ведущие колеса относительно большого диаметра, вывесить которые очень сложно благодаря рычагам подвески с большим ходом (38 мм). Эти колеса имеют глубокий протектор из нескользящего резиноподобного материала. В итоге робот отличается хорошей проходимостью. Наши измерения дали следующие массогабаритные величины для Neato XV: ширина 330 мм, длина 316 мм, высота 100 мм, масса 3,6 кг. Отметим, что высота относительно большая, что уменьшает доступную для уборки площадь.
При уборке одна единственная, пусть и с ворсом, и с лопастями, щетка должна справляться с задачей вычесывания и подбрасывания мусора с убираемой поверхности. Далее мусор потоком воздуха засасывается в емкость пылесборника, где он, мусор, задерживается складчатым (в данной комплектации) фильтром. Пройдя через вентилятор, воздух, выполнивший свою задачу носителя, выбрасывается назад и немного вверх через решетку в задней части робота. Данная модель не является пылесосом в классическом смысле, так как непосредственно с очищаемой поверхности пыль не засасывается. Крышка-фиксатор щетки имеет очень важный (как выяснилось) элемент конструкции — перпендикулярные направляющие-ограничители, благодаря которым щетка не будет наматывать уголки ковриков и недлинную бахрому по краям ковров.
 Стальная ось щетки вращается в двух подшипниках из цветного сплава, установленных в упругие пластиковые виброизолирующие втулки. Снятие и установка щетки немного затруднены тем, что пользователю приходится снимать и надевать приводной зубчатый ремень. Сразу за щеткой расположен желобок-воздуховод, переходящий в центре во всасывающий патрубок, состыкованный с входным отверстием пылесборника. Корпус пылесборника изготовлен из прозрачного пластика, но его крышка все равно непрозрачная, поэтому, не вынув пылесборник, невозможно оценить его фактическое заполнение. Но хоть опустошение проконтролировать можно.
Стальная ось щетки вращается в двух подшипниках из цветного сплава, установленных в упругие пластиковые виброизолирующие втулки. Снятие и установка щетки немного затруднены тем, что пользователю приходится снимать и надевать приводной зубчатый ремень. Сразу за щеткой расположен желобок-воздуховод, переходящий в центре во всасывающий патрубок, состыкованный с входным отверстием пылесборника. Корпус пылесборника изготовлен из прозрачного пластика, но его крышка все равно непрозрачная, поэтому, не вынув пылесборник, невозможно оценить его фактическое заполнение. Но хоть опустошение проконтролировать можно.
 Задний торец пылесборника заглушен воздушным фильтром, который снимается при очистки этой емкости для мусора.
Задний торец пылесборника заглушен воздушным фильтром, который снимается при очистки этой емкости для мусора.
 Для исключения паразитного подсоса воздуха все стыки — патрубка и пылесборника, пылесборника и фильтра, фильтра и всасывающей решетки — оснащены упругими уплотнителями. В целом узел пылесборника удобен в использовании.
Для исключения паразитного подсоса воздуха все стыки — патрубка и пылесборника, пылесборника и фильтра, фильтра и всасывающей решетки — оснащены упругими уплотнителями. В целом узел пылесборника удобен в использовании.
 Предупредим, что этот пылесос недопустимо использовать во влажном помещении или на поверхностях с разлитыми жидкостями. После контакта пылесоса с жидкостями в лучшем случае придется долго очищать его от налипшего слоя пыли, в худшем случае пылесос может выйти из строя.
Предупредим, что этот пылесос недопустимо использовать во влажном помещении или на поверхностях с разлитыми жидкостями. После контакта пылесоса с жидкостями в лучшем случае придется долго очищать его от налипшего слоя пыли, в худшем случае пылесос может выйти из строя.
Эта модель всего два основных режима уборки:
Однократная уборка всей доступной площади. И интенсивная очистка определенного места. В это место пылесос просто переносится. Кстати, ухватить его можно за нишу в передней части корпуса. Автоматический запуск уборки обеспечивает режим работы по расписанию — можно указать день/дни недели и время, когда нужно начинать уборку.
 Согласно заявлениям производителя в режиме ручного запуска с базы робот будет убирать или пока не уберет всю доступную площадь, или до истощения заряда батарей. Во втором случае, он вернется на базу, зарядит аккумуляторы, затем продолжит уборку с того места, где закончил. Всего с промежуточной подзарядкой он сможет сделать максимум три цикла уборки. Столько же циклов и при старте не с базы, но после подзарядки робота нужно будет возвращать примерно в тоже место, откуда первоначально уборка началась. При старте с базы по расписанию циклов уборки будет максимум два (с одной промежуточной подзарядкой).
Согласно заявлениям производителя в режиме ручного запуска с базы робот будет убирать или пока не уберет всю доступную площадь, или до истощения заряда батарей. Во втором случае, он вернется на базу, зарядит аккумуляторы, затем продолжит уборку с того места, где закончил. Всего с промежуточной подзарядкой он сможет сделать максимум три цикла уборки. Столько же циклов и при старте не с базы, но после подзарядки робота нужно будет возвращать примерно в тоже место, откуда первоначально уборка началась. При старте с базы по расписанию циклов уборки будет максимум два (с одной промежуточной подзарядкой).
Пространственное планирование уборки обеспечивается с помощью ограничительной магнитной ленты, которую можно просто положить на пол или спрятать под напольным покрытием. Лента широкая и относительно тяжелая, поэтому ее, в принципе, можно дополнительно на полу не закреплять. Неоспоримым преимуществом ленты является то, что она не требует для своей работы источника питания.
О своем состоянии пылесос информирует с помощью двухцветного светодиодного индикатора, звуковых сигналов и графического ЖК-дисплея.
 Дисплей этот относительно крупный, но неконтрастный. Восприятие написанного на нем также осложняют требование к ориентации текста (это не пульт ДУ, который и так в руках держишь в правильной ориентации), а также (для многих российских пользователей) отсутствие русского языка среди возможных вариантов. Вообще, как показала практика, голосовое оповещение — не такой уж и плохой вариант коммуникации с роботом, а уж сделать его двусторонним было бы совсем неплохо… Но это мечты, в данном случае мы должны были разбирать, что там робот вывел на свой экран, и присев перед роботом, продираться через пункты меню.
Дисплей этот относительно крупный, но неконтрастный. Восприятие написанного на нем также осложняют требование к ориентации текста (это не пульт ДУ, который и так в руках держишь в правильной ориентации), а также (для многих российских пользователей) отсутствие русского языка среди возможных вариантов. Вообще, как показала практика, голосовое оповещение — не такой уж и плохой вариант коммуникации с роботом, а уж сделать его двусторонним было бы совсем неплохо… Но это мечты, в данном случае мы должны были разбирать, что там робот вывел на свой экран, и присев перед роботом, продираться через пункты меню.
Тестирование Ниже представлены результаты тестирования по нашей методике, подробно описанной в отдельной статье.
Режим Время уборки*, мин: сек Доля убранного мусора, %% Первый цикл 8:38 84,3 Второй цикл 9:50 91,1 (суммарный) Третий цикл 10:13 92,4 (суммарный) Четвертый цикл 9:32 92,7 (суммарный) Первый цикл 9:43 87,0 Второй цикл 11:33 93,4 (суммарный) Третий цикл 10:44 94,0 (суммарный) Первый цикл 9:56 86,5 Второй цикл 11:33 91,9 (суммарный) Третий цикл 10:04 93,1 (суммарный) Видео ниже снято сверху с одной точки, база находится внизу по центру, при обработке часть видеоряда ускорена в десять раз:
В начале уборки робот обходит по периметру доступную для уборки площадь, а затем, двигаясь змейкой, обходит внутреннюю часть территории. Робот определенно строит и использует карту, это видно по маршруту движения — он заполняет змейкой всю доступную площадь, при этом по возможности убирает поверхность только один раз и целенаправленно переходит к тому месту, которое он еще не убирал. Без карты такое поведение было бы невозможно осуществить. Видимо иногда, как на приведенном ролике, на первом этапе обхода робот делит территорию на относительно большие участки, которые убирает последовательно. Видно, что по возможности робот движется правым боком к препятствию, дополнительно контролируя расстояние до него с помощью ИК-датчика на бампере. Этот датчик, а также механический бампер помогают роботу корректно работать при наличии низких препятствий (как балка в нижней части кадра или плинтуса вдоль стен), которые не обнаруживаются лидаром. Несмотря на такое обилие датчиков робот не всегда корректно отслеживает свои габариты относительно непреодолимых препятствий. Так на ролике выше видно, что базы робот все-таки касается, а повороты в углах даются ему с большим трудом, и тут уж кто кого пересилит, или робот раздвинет то, что ему мешается (тяжелую балку или раму из ДСП, формирующую загон), или задерет заднюю часть, но все-таки повернет. Кстати, в узкие места, которые шире корпуса робота на 50 мм и которые он может определить с помощью лидара, пылесос даже и не пытается заезжать. В итоге нам пришлось немного отступить от правил тестирования и увеличить ширину загона до 40 см, а сначала мы выставили 38 см = 33 см (ширина робота) + 5 см (зазор по методике).
В целом, несмотря на широкую щетку, громкий звук и сильный поток воздуха (он иногда задувал в микрофон камеры, находящейся в метрах четырех от пылесоса), убирает робот быстро, но не так качественно, как ожидалось. Причин этому, как нам видится, несколько. По факту воздушный поток, который прокачивает через себя робот распределяется на всю длину (а это 238 мм) щетки, что уменьшает действующую силу всасывания, а ведь только с ее помощью рис (как и любой другой мусор) может перемещаться в пылесборник сама щетка мусор в емкость не закидывает, а только подцепляет с пола. Что уж совсем странно, так это то, что часть риса остается даже на дне патрубка к пылесборнику, где скорость воздушного потока максимальная.
 В итоге прохождение робота не гарантирует уборку риса на 100%, а часть риса, видимо, какое-то время болтается в отсеке щетки, откуда вываливается при поворотах. Вторым, впрочем, очевидным с самого начала, фактором, уменьшающим качество уборки, является отсутствие боковой щеточки, поэтому много мусора остается вдоль препятствий. Распределение мусора после первого цикла уборки:
В итоге прохождение робота не гарантирует уборку риса на 100%, а часть риса, видимо, какое-то время болтается в отсеке щетки, откуда вываливается при поворотах. Вторым, впрочем, очевидным с самого начала, фактором, уменьшающим качество уборки, является отсутствие боковой щеточки, поэтому много мусора остается вдоль препятствий. Распределение мусора после первого цикла уборки:
 Рис остался как на площади, так и вдоль препятствий:
Рис остался как на площади, так и вдоль препятствий:
 После третьего цикла риса на площади практически не осталось, но вдоль препятствий он в наличии:
После третьего цикла риса на площади практически не осталось, но вдоль препятствий он в наличии:
 Видео ниже показывает некоторые моменты уборки более крупным планом и с других ракурсов:
Видео ниже показывает некоторые моменты уборки более крупным планом и с других ракурсов:
По завершении уборки робот отключает всасывающий вентилятор и, видимо, привод основной щетки, быстро, целенаправленно и по возможности кратчайшим путем движется к месту перед базой, разворачивается на некотором расстоянии от нее задней частью с контактами к базе, медленно к ней приближается и, выполняя колебательные движения, неторопливо пристыковывается. Грубое определение местоположения базы выполняется, видимо, по составленной карте, но точная стыковка, возможно, выполняется с использованием маячков на самой базе (должно же быть что-то за полупрозрачной вставкой спереди на базе).
Пример использования ограничительной ленты приведен на следующей видеозаписи:
Проблем не выявлено — ленту робот не пересекает.
В режиме локальной уборки робот убирает змейкой с прямыми углами. Согласно руководству размер убираемой зоны равен 4 на 6 футов (примерно 1,2 на 1,8 м). Нетипично то, что робота нужно помещать по центру и перед убираемым участком.
 В итоге в нашем тесте ограничителем спереди послужила скорее стена, а не заданный алгоритмом размер убираемого участка:
В итоге в нашем тесте ограничителем спереди послужила скорее стена, а не заданный алгоритмом размер убираемого участка:
Уровень шума равен примерно 67 дБА. Это громко — тише, конечно, чем типичный дешевый обычный пылесос, но все равно громко. Находиться в помещении и делать что-то осмысленное, когда там работает Neato XV, без звукоизолирующих наушников очень сложно. Ситуацию с шумом осложняет неприятный завывающий звук, возникающий на максимальных оборотах вентилятора.
При зарядке пылесоса на базе потребление от электросети составляет до 47 Вт в начале процесса. Если пылесос включен и находится на базе, то от сети потребляется примерно 4 Вт, а периодически потребление возрастает до 16 Вт (видимо, подзарядка аккумуляторов). Если пылесос убрать с базы, то потребление упадет до 0,3 Вт — столько потребляет сама база, включенная в сеть. На полную зарядку аккумуляторов пылесоса требуется примерно 1 час. Аккумуляторы без проблем может заменить пользователь самостоятельно, воспользовавшись обычной крестовой отверткой среднего размера:
 Тестируемый пылесос автономно убирает меньше часа (38 и 44 минут в двух тестах — 4 или 5 циклов уборки на нашем тестовом участке площадью чуть менее 9 м²). То есть на одном заряде робот может убрать помещение площадью около 45 м² или (с промежуточными подзарядками) до 135 м² при запуске в ручную и до 90 м² при запуске по расписанию.
Тестируемый пылесос автономно убирает меньше часа (38 и 44 минут в двух тестах — 4 или 5 циклов уборки на нашем тестовом участке площадью чуть менее 9 м²). То есть на одном заряде робот может убрать помещение площадью около 45 м² или (с промежуточными подзарядками) до 135 м² при запуске в ручную и до 90 м² при запуске по расписанию.
Выводы Робот-пылесос Neato XV Signature Pro относится к классу устройств с продвинутой системой ориентации: он строит карту помещения и умеет прокладывать рациональный маршрут движения с минимальным повторным перекрытием траектории уборки. Уникальной особенностью этого робота является использование сканирующего лазерного дальномера инфракрасного диапазона (лидара), с помощью которого Neato XV дистанционно обнаруживает препятствия, определяет их геометрию, составляет карту убираемого помещения и отслеживает свое местоположение. Помогают лидару механический бампер и ИК-датчики дистанции — один сбоку и два на днище. Непосредственное и дистанционное определение геометрии помещения уменьшают вероятность сбоев навигации, в результате робот тратит на уборку минимум времени и уверенно находит базовую станцию. Отметим, что угловатая форма корпуса несколько затрудняет маневрирование робота, однако в потенциально опасные места он забираться избегает, а мощные колесные движители в случае чего или подвинут препятствия, или слегка приподнимут самого робота, обеспечив завершение маневра. К сожалению, отсутствие боковой щеточки приводит к тому, что этот замечательный во всех отношениях робот не очень хорошо убирает впритык к препятствиям.
Достоинства: Продвинутая система ориентации и прокладка рационального маршрута уборки Удобное извлечение и чистка пылесборника Ограничение движения с помощью магнитной ленты Небольшие габариты базы Уборка по расписанию Недостатки: Не самое высокое качество уборки впритык к препятствиям Высокий уровень шума Выражаем благодарность интернет-магазину роботов-пылесосов Robot4home.ruза предоставленный на тестирование робот-пылесос Neato XV Signature Pro
Полный текст статьи читайте на iXBT
