Робот-пылесос Neato Botvac Connected: подключаемый к Сети флагман линейки с литиевой батареей
Ранее мы рассмотрели модель Botvac D85 из новой линейки роботов-пылесосов компании Neato Robotics. Теперь настала очередь флагмана: робота Neato Botvac Connected.
Содержание:
Паспортные характеристики, комплект поставки и цена
| Кинематическая система | Два ведущих колеса и четыре поддерживающих фиксированный ролика |
| Способ сбора пыли | Инерционное перемещение и вакуумная фильтрация |
| Пылесборник | Одно отделение |
| Основная щетка | Одна: лепестково-щетинистая или лепестковая щетка, ширина 276 мм |
| Боковые щетки | Одна |
| Дополнительно | Упругий неподвижный скребок |
| Режимы очистки | Автоматический с возвратом для подзарядки, локальный, по расписанию по дням недели |
| Эффективность очистки | Нет данных |
| Уровень шума | Нет данных |
| Датчики препятствий | Сканирующий лазерный дальномер инфракрасного диапазона (лидар), механический передний/боковой бампер, ИК-датчики перепада высоты, боковой ИК-датчик |
| Датчики ориентации | Лидар |
| Управление на корпусе | Механические и сенсорные кнопки |
| Дистанционное управление | С мобильного устройства по Сети |
| Оповещение | Графический ЖК-дисплей с подсветкой, светодиодный индикатор состояния, звуковые сигналы |
| Время автономной работы | Нет данных |
| Время зарядки | Нет данных |
| Способ зарядки | На зарядной базе с автоматическим возвратом |
| Батарея | Литий-ионный аккумулятор, 14,4 В, 4200 мА·ч, 61 Вт·ч |
| Потребляемая мощность | Нет данных |
| Масса | 4,1 кг |
| Размеры (ширина×длина×высота) | 335×321×100 мм |
| Особенности | Создание карты и выбор оптимального маршрута уборки, магнитный ограничитель движения |
| Комплект поставки* |
|
| Ссылка на сайт производителя | www.neatorobotics.com www.neato-robotics.ru |
| Средняя цена по данным Яндекс.Маркет | T-12930066 |
| Предложения по данным Яндекс.Маркет | L-12930066–10 |
Внешний вид
Внешне от роботов Botvac D75 и D85 топовый Connected отличается только серой крышечкой лидара и полностью черным корпусом.

В плане задняя часть корпуса круглая (вернее, полукруглая), но спереди корпус переходит в прямоугольную часть без изменения ширины.

Такая геометрия позволяет основную щетку сдвинуть максимально вперед и расширить ее почти до габаритов корпуса. В итоге ширина основной щетки составляет 276 мм. При этом от торца щетки до правого края корпуса остался промежуток всего в примерно 10 мм. Задача сбора мусора с оставшейся не захваченной основной щеткой территории возложена на небольшую боковую щеточку. Переход верхней панели в боковые плоскости угловатый, что снижает вероятность того, что робот будет застревать под препятствиями с небольшим просветом, впрочем, основную роль тут будут играть фирменная система обнаружения препятствий — в большинстве случаев робот просто не пытается забраться туда, где его могут ожидать трудности с маневрированием.

Небольшой скос спереди снизу помогает роботу преодолевать препятствия. Корпус изготовлен из черного пластика со слегка шершавой матовой поверхностью без покрытия. Правда, как показывает практика, лучше, чтобы робот был заметным в темноте и на темном полу, то есть был сверху светлым. Крышечка башенки лидара изготовлена из алюминия, анодированного и покрытого светло-серым лаком, приобретающим при косом освещении легкий бронзовый оттенок. Окружает крышечку внутреннее кольцо из пластика с зеркальной хромированной поверхностью, а сам корпус башенки изготовлен из черного пластика с зеркально-гладкой и неустойчивой к царапинам поверхностью. Рядом с башенкой располагается контрольная панель с четырьмя сенсорными кнопками — три стрелки-скобочки для навигации по меню и одна вытянутая функциональная — и с небольшим графическим цветным ЖК-дисплеем.

Дисплей оснащен подсветкой, автоматически включающейся при работе с меню и при выводе информационных сообщений. Если часы робота показывают ночь, то дисплей меняется на темный инвертированный вариант. Дополнительно в передней части корпуса есть две относительно крупные механические кнопки. Кнопка в клеточку отвечает за запуск локальной уборки, кнопка с домиком — уборки в доме. Ободок вокруг кнопок подсвечивается двухцветным (белый/оранжевый) индикатором, указывающим на текущее состояние аккумулятора, вид выполняемой уборки и на ошибки. Ниша между кнопками служит удобной ручкой, которую можно использовать для переноски робота одной рукой. Вторая функция этой ниши заключается в обеспечении доступа к пылесборнику — он снимается за край его верхней панели, которая чуть выступает над нишей. В отсеке пылесборника можно обнаружить прикрытый резиновой заглушкой сервисный разъем Micro-USB и механический выключатель питания, который нужно перевести в положение On у только что прибывшего с завода робота.

Спереди установлен механический бампер, который закрывает всю переднюю часть робота и немного заходит наверх и на бока.

На правом боку корпуса ближе к бамперу расположен вспомогательный ИК-датчик препятствий, помогающий роботу двигаться вплотную к препятствию, по возможности без физического контакта с ним.

В задней части корпуса находятся «выхлопная» решетка, контактные площадки для зарядки на базе и небольшая решетка громкоговорителя.

Перевернув пылесос вверх днищем, мы увидим два ИК-датчика перепада высоты (окошки в углах спереди), отсек с щеткой, закрытый крышкой с ограничительными направляющими (уголки ковров не наматываются) и с дополнительным упругим неподвижным скребком, небольшую боковую щеточку, крышку отсека аккумулятора, два ведущих колеса на подпружиненных рычагах и четыре поддерживающих ролика — два поменьше в передней части и два побольше в задней части.

База относительно большая и не очень легкая.

Корпус базы изготовлен из черного пластика гладкого и без покрытия, на нем хорошо заметны царапины и следы от пальцев. На днище базы наклеены две резиновые противоскользящие площадки.

Площадь днища увеличена за счет поддерживающей выступающей вперед юбки. В итоге база стоит довольно устойчиво и может быть установлена на полу без какой-либо дополнительной поддержки. На передней панели базы — большое окошко из тонированного полупрозрачного пластика, за которым находятся пассивные маячки парковки (чередующиеся полоски из поглощающего и отражающего материала — слегка просвечивают на фотографии). Ниже — длинные подпружиненные контактные площадки.

Такая конструкция гарантирует надежный контакт робота с базой даже при слегка кривоватой парковке. При нажатии контактные площадки не только утапливаются, но и смещаются вбок, что способствует очистке контактирующих поверхностей. Блок питания встроен в базу. Сетевой кабель питания отсоединяемый (используется трехштырьковый разъем с цилиндрическими контактами). Излишки кабеля питания укладываются в специальный канал, где он фиксируется небольшими зацепами.

Измеренная длина сетевого шнура составила 160 см от базы до вилки. Паспортные характеристики базы: вход — 100—240 В 50/60 Гц, выход — 18 В постоянного тока до 2 А.
Из дополнительных аксессуаров и расходных материалов в комплект поставки вошли два запасных складчатых фильтра типа Ultra Performance.

Производитель указывает, что фильтры Ultra Performance задерживают аллергены и частицы размером от 0,3 мкм. От High-Performance, входящих в комплект Botvac В80/D85, эти фильтры отличаются наличием сеточки, которая предотвращает забивание мусора глубоко в складки фильтра, а также нажимным фиксатором, облегчающим отсоединение фильтра от пылесборника. Отметим, что пылесборники у всех роботов Neato Botvac одинаковые и они совместимы как с фильтрами Ultra Performance, так и High-Performance, и просто Standard. В комплекте робота Neato Botvac Connected есть альтернативная лепестковая (без ворса) основная щетка, а также магнитная лента-ограничитель длиной 2 м. Есть и документация — напечатанное руководство, в том числе и вариант на русском языке. Упакован пылесос в не очень большую красочно оформленную коробку с пластиковой ручкой.

Кроме картинок на коробке есть и некоторое количество полезной информации (основные особенности, комплектация), но без умильного щеночка не обошлось. На коробке с Neato Botvac, официально поставляемых в Россию, присутствует наклейка компании Clever&Clean — эксклюзивного представителя продукции Neato Robotics в России.

Чтобы сохранить такую красоту, коробка дополнительно упакована в простую коробку из гофркартона уже без ручки и даже без выреза под ручку внутренней коробки. Для переноски придется делать традиционную ручку из клейкой ленты.

Функционирование
О функциях пылесоса можно прочитать в прилагаемом руководстве пользователя. Тем, кто только присматривается к подобной технике, можно порекомендовать загрузить руководство и внимательно его изучить.
Роботы от Neato Robotics оснащены уникальной системой ориентации, основой которой является сканирующий лазерный дальномер инфракрасного диапазона (лидар). Лидар установлен в башенке на верхней панели. Через горизонтальные «бойницы» этой башенки можно разглядеть объективы излучающего лазерного диода и фотоприемника. Рабочая длина волны равна 785 нм, что можно охарактеризовать как ближний ИК-диапазон. Пиковая мощность лазерного излучения составляет 2,1 мВт, длительность импульсов 200 мкс, частота импульсов 1,8 кГц, диаметр пучка 2,3 мм. При желании можно рассчитать энергетические характеристики этого излучения, но наверняка они, даже без учета вращения излучателя, окажутся ниже предельно допустимого уровня лазерного излучения, то есть лидар в этом роботе не представляет никакой опасности для человека или домашних питомцев. Кстати о вращении — лазерный диод и фотоприемник установлены на роторе, который вращается в горизонтальной плоскости, и именно это позволяет роботу получать данные о расстоянии до препятствий с обзором в 360 градусов по горизонтали. То есть робот не обязательно должен подъезжать к препятствию вплотную, чтобы определить его наличие. Кроме того, дистанционное определение препятствий и их геометрии позволяет роботу составлять карту помещения и отслеживать свое собственное местоположение. Робот «знает», где он находится, где находится базовая станция (при запуске с нее или если «увидит» ее), где он уже убрал, где нужно убрать и где в периметре территории еще остаются неисследованные участки.
Побочным следствием дистанционного обнаружения препятствий является то, что фактически препятствием для робота является все, что отражает излучение лазера — любая даже самая легкая занавеска или свешивающееся с кровати покрывало. По идее, меняющаяся обстановка — перемещение предметов мебели или расхаживающие люди и не люди — может сбивать ориентирование робота, но на практике ходить вокруг робота не возбраняется — видимо, есть какой-то алгоритм отбрасывания непостоянных во времени преград. Также нужно учитывать то, что лидар работает в плоскости на определенной высоте от пола, то есть все, что ниже или выше, робот «не видит». Впрочем, на случай «ниже» робот оснащен механическим бампером и ИК-датчиком препятствий на нем. Бампер помогает и в случае очень темных практически не отражающих в ИК-диапазоне препятствий. Вариант препятствий, находящихся выше плоскости действия лидара, в теории может приводить к некоторым проблемам, так как крыша башенки находится явно выше этой плоскости. Отметим, что высота робота относительно большая, что уменьшает доступную для уборки площадь.
Кинематическая схема «классическая»: оси ведущих колес расположены на одном диаметре окружности корпуса. Окружности, правда, которую можно вписать в корпус, так как он на самом деле имеет подковообразную форму. Робот может совершать разворот на месте, но выступающая вперед прямоугольная часть не может не затруднять маневрирование. Все поддерживающие ролики в данном случае жестко закреплены, но движения робота это не должно сильно ограничивать, так как ролики изготовлены из гладкой и относительно скользкой пластмассы. К тому же основной вес всегда приходится на ведущие колеса относительно большого диаметра, вывесить которые очень сложно благодаря рычагам подвески с большим ходом. Эти колеса имеют глубокий протектор из нескользящего резиноподобного материала. В итоге робот отличается хорошей проходимостью.
При уборке основная щетка должна справляться с задачей вычесывания и подбрасывания мусора с убираемой поверхности. Далее мусор потоком воздуха засасывается в емкость пылесборника, где он, мусор, задерживается фильтром. Пройдя через вентилятор, воздух, выполнивший свою задачу носителя, выбрасывается назад через решетку в задней части робота. Данная модель не является пылесосом в классическом смысле, так как непосредственно с очищаемой поверхности мусор почти не засасывается (разве что очень легкая пыль).
У предыдущей линейки роботов Botvac торец основной щетки вращался в шариковом подшипнике. У нерадивых пользователей (забывавших вовремя почистить щетку) волосы, нитки и т. д. наматывались в щель между подшипником и торцом щетки, забивались в сепаратор, подшипник заклинивало, его внешнее кольцо начинало вращаться вместе с щеткой в пластиковом гнезде, корпус робота в этом месте плавился и деформировался, бампер заклинивало в нажатом состоянии и робот превращался в груду бесполезного пластика и электроники. Учтя этот печальный опыт, производитель изменил конструкцию торцевого подшипника основной щетки. Теперь используется подшипник скольжения, защищенный от попадания в него волос и грязи пластиковым кожухом. Отметим, что основная щетка имеет уникальную конструкцию, позволяющую ее разобрать и тщательной вычистить все составляющие части. Нужно вытащить торцевые заглушки, затем лепестки с щетиной и лопастями вытягиваются из направляющих.

В комплект поставки входит специальный инструмент с гребенкой и лезвием в загогулине.

С его помощью можно срезать намотавшиеся волосы, вычесывать щетку и извлекать мусор из складок воздушного фильтра. Альтернативную щетку, которая только с лопастями, по идее, может быть выгоднее использовать там, где на полу появляется много шерсти, так как не потребуется вычесывать плотные колтуны из пучков щетины. Кроме того, лопастная щетка может эффективнее выбивать пыль из ковров.

Лопасти на этой щетки слегка закручены винтом, такая особенность должна уменьшать шумность этой безворсовой щетки — лопасть не будет ударять о пол сразу всей длиной ребра

Небольшая боковая щеточка фиксируется на приводном валу с помощью магнита, поэтому для ее снятия и установки инструменты не нужны. Щеточка находится после основной щетки, то есть она должна захватить мусор и закинуть его немного вперед в зону действия основной щетки. И, конечно, такое расположение боковой щеточки точно не будет способствовать выгребанию мусора из самых углов помещения. Сразу за основной щеткой расположен желобок-воздуховод, переходящий в центре во всасывающий патрубок, состыкованный с входным отверстием пылесборника.

Корпус пылесборника в основном изготовлен из прозрачного пластика (ABS). Однако крышка пылесборника непрозрачная, поэтому, не вынув пылесборник, невозможно оценить его фактическое заполнение. Но хоть опустошение проконтролировать можно. Впрочем, в пылесосе есть отключаемая функция предупреждения о переполнении пылесборника, поэтому постоянно контролировать его наполнение особой необходимости нет. Задний торец пылесборника заглушен воздушным фильтром, который снимается при очистке этой емкости. Для исключения паразитного подсоса воздуха стыки патрубка и пылесборника, а также фильтра и всасывающей решетки оснащены упругими уплотнителями.
Геометрия емкости для мусора простая, поэтому мусор в ней не задерживается и легко из нее вытряхивается. В целом узел пылесборника удобен в использовании. Робот отслеживает наличие пылесборника (в отсеке есть механическая кнопочка-датчик), и если пользователь после цикла уборки извлекает пылесборник и быстро возвращает его на место, то робот выводит на экран благодарственную надпись. Если пылесборника, по мнению робота, слишком долго нет на месте, то этот интеллектуальный уборщик начинает возмущенно издавать привлекающие внимание звуковые сигналы и выводит на экран надпись с требованием вернуть ему недостающий элемент.
Предупредим, что этот пылесос недопустимо использовать во влажном помещении или на поверхностях с разлитыми жидкостями. После контакта пылесоса с жидкостями в лучшем случае придется долго очищать его от налипшего слоя пыли, а в худшем случае пылесос может выйти из строя.
Эта модель имеет три основных режима уборки:
- Однократная уборка всей доступной площади
- Ручное управление
- Очистка определенного места — в нужное место пылесос переносится или направляется в режиме ручного управления
Автоматический запуск уборки обеспечивает режим работы по расписанию — можно указать день/дни недели и время на каждый день свое, когда нужно начинать уборку.

Согласно заявлениям производителя в режиме ручного запуска с базы робот будет убирать или пока не уберет всю доступную площадь, или до истощения заряда батареи. Во втором случае, он вернется на базу, зарядит аккумулятор, затем продолжит уборку с того места, где закончил. Всего с двумя промежуточными подзарядками он сможет сделать максимум три цикла уборки. Столько же циклов и при старте не с базы, но робота нужно будет вручную относить к базе и после подзарядки робота нужно будет возвращать примерно в тоже место, откуда первоначально уборка началась. При старте с базы по расписанию циклов уборки будет тоже максимум три (с двумя промежуточными подзарядками).
Пространственное планирование уборки обеспечивается с помощью ограничительной магнитной ленты, которую можно просто положить на пол или спрятать под напольным покрытием.

Лента широкая и относительно тяжелая, поэтому ее, в принципе, можно дополнительно на полу не закреплять. Неоспоримым преимуществом ленты является то, что она не требует для своей работы источника питания. В комплекте идет кусок ленты длиной 2 м, при необходимости можно дополнительно приобрести нужное количество отрезков по 4 м.
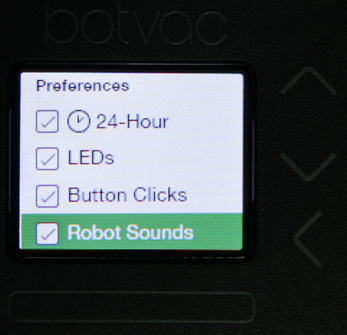
О своем состоянии пылесос информирует с помощью двухцветного светодиодного индикатора, звуковых сигналов и графического ЖК-дисплея. Дисплей этот относительно небольшой, но контрастный и яркости его подсветки достаточно для ярко освещенного помещения. Восприятие написанного на нем, конечно, осложняют требование к ориентации текста (это не пульт ДУ, который и так в руках держишь в правильной ориентации), а также (для многих российских пользователей) отсутствие русского языка среди возможных вариантов меню.

Из меню можно запустить робота на уборку (обычная или локальная уборка), при желании выбрав режим потише с названием Eco:

Выполнить настройку, в частности отключить индикаторы и звуки:
Выбрать язык меню, запустить обновление микропрограммы с подключенного USB-носителя (переходник приложен не зря) и т. д. Альтернативный, более удобный и уж точно более увлекательный способ управления роботом — это использование фирменного приложения, устанавливаемого на мобильные устройства с iOS или Android на борту.
Запустив приложение первый раз, нужно установить связь с роботом, который должен быть в радиусе действия Wi-Fi-сети (и только 2,4 ГГц) с выходом в большую Сеть, так как для управления роботом привлекается глобальный облачный сервис. С одной стороны, это хорошо, так как контролировать робота можно отовсюду, где есть подключение к Сети, с другой — плохо, так как если нет доступа в Сеть, нет и доступа к роботу, даже если он и мобильное устройство находятся в одной локальной сети. К сожалению, без регистрации в сервисе, для чего потребуется работающая электронная почта, не обойтись. Для подключения робота к Сети нужно включить в меню установок его Wi-Fi-адаптер (если он подключался ранее к другой сети, то нужно еще сбросить ее настройки из меню, а иногда и с помощью хитрой комбинации из нажатия на кнопку и бампер), при этом робот создает свою локальную сеть. Далее запущенное приложение подключается к сети робота, предает указанные пользователем имя и пароль сети, к которой нужно подключиться, и если с подключением нет проблем, то пользователю предлагается ввести имя робота (по умолчанию My Neato).
Доступные роботы отображаются в списке приложения с зеленой полосочкой.
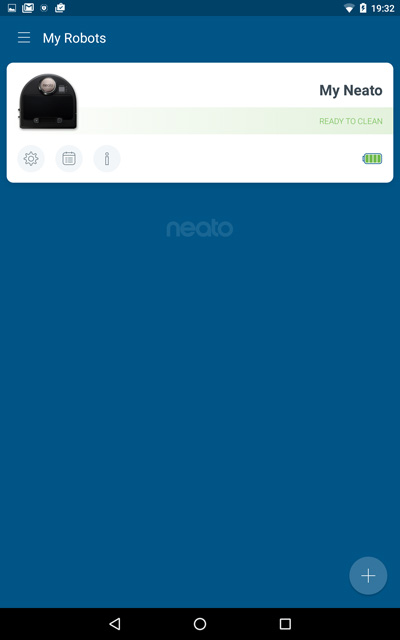
Выбрав робота, можно запустить уборку (если она еще не выполняется):

При необходимости выбрав тип уборки — всей площади, локального участка или в режиме ручного управления:
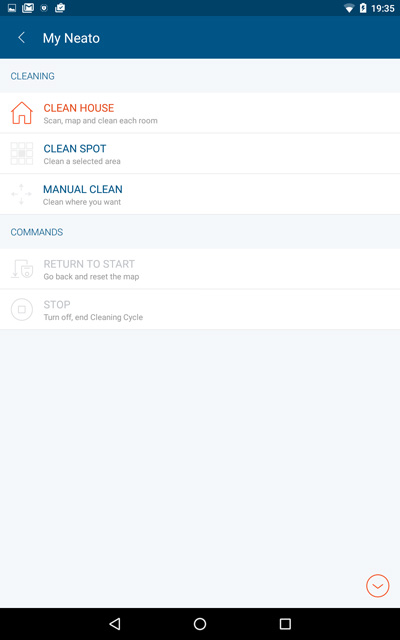
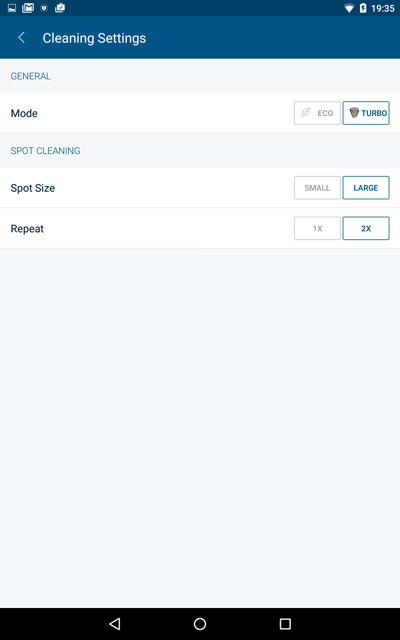
Для первого режима можно выбрать режим пониженной мощности (Eco), для локальной уборки выбирается мощность, размер убираемой площади и количество проходов. Последние две установки доступны только при управлении с мобильного устройства.
Отметим, что режим ручного управления активен только в том случае, если робот и мобильное устройство находятся в одной локальной сети.
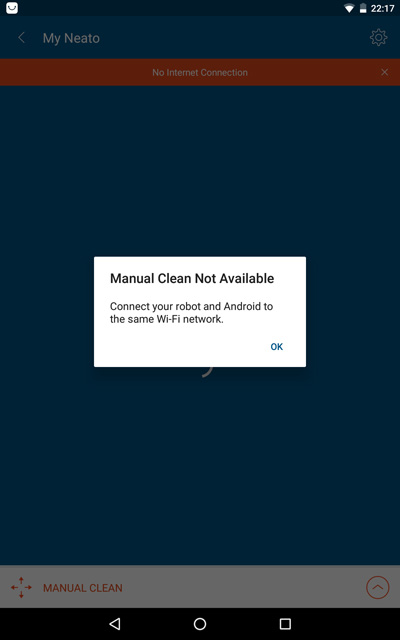
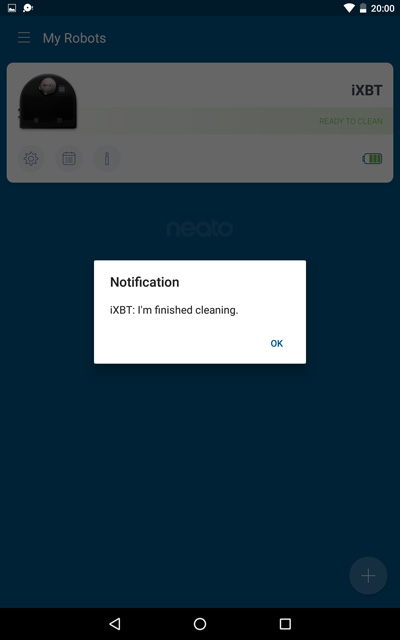
Ручное управление не очень удобное, но побаловаться можно. Да, и доступно оно только из приложения, так как пульта ДУ для этого робота нет. Закончив с уборкой робот присылает стандартное уведомление, звуковой сигнал которого можно услышать на некоторых видеороликах ниже.
Разумеется, в приложении можно редактировать недельный календарь уборки по расписанию, при этом подключенный к Сети робот сам синхронизирует свои часы. Русской версии интерфейса у этой программы, видимо, нет, но может быть будет.
Тестирование
Ниже представлены результаты тестирования по нашей методике, подробно описанной в отдельной статье. В робот была установлена лепестково-щетинистая щетка.
| Режим | Время уборки, мин: сек | % |
| Turbo, первый запуск | 14:43 | 94,9 |
| Turbo, второй запуск | 14:58 | 96,9 (суммарный) |
| Turbo, третий запуск | 15:45 | 97,3 (суммарный) |
| Eco, первый запуск | 14:44 | 94,4 |
| Eco, второй запуск | 15:24 | 96,3 (суммарный) |
| Eco, третий запуск | 8:39 | 96,7 (суммарный) |
Видео ниже снято сверху с одной точки, база находится внизу по центру, при обработке часть видеоряда ускорена в десять раз, режим Turbo:
Режим Eco:
В случае нашего тестового участка в начале уборки робот обходит по периметру доступную для уборки площадь, а затем, двигаясь змейкой, проходит внутреннюю часть территории. Почему-то в большинстве случаев робот выполнял эти процедуры дважды, иногда второй раз меняя направление змейки на перпендикулярное. Это привело к увеличению времени уборки до примерно 15 мин.
Световой маркер, закрепленный на роботе, позволяет наглядно показать траекторию движения робота и степень заполнения площади уборки (7 минут уборки, при этом на тестовой огороженной территории 3 на 3 м установлены только две коробки от роботов-пылесосов, а робот решил в этот раз обойтись одним проходом):
Заявлено, что если размеры убираемой площади превышают 4,5 на 4,5 м, то робот делит ее на участки такого размера и убирает в них последовательно. Размеры нашего тестового участка составляют 3 на 3 м, поэтому робот убирал его за один раз. Как показали дополнительные тесты, в случае больших помещений робот действительно разбивает их на участки (достаточно формально, без учета реальной геометрии помещения), повторяя в каждом один и тот же цикл — обход участка по периметру, затем змейкой обход внутренней площади участка и переход к следующему участку. То есть обход по периметру имеет отношение именно к способу уборки, а не к ориентации робота в пространстве. Данный пылесос определенно строит и использует карту, это видно по маршруту движения — он по возможности убирает поверхность только один раз и целенаправленно переходит к тому месту, которое он еще не убирал. Без карты такое поведение было бы невозможно осуществить. Видно, что робот движется правым боком (где есть боковая щеточка и основная подходит ближе к краю корпуса) к препятствию, дополнительно контролируя расстояние до него с помощью механического бампера и бокового ИК-датчика. Несмотря на такое обилие датчиков робот не всегда корректно отслеживает свои габариты относительно непреодолимых препятствий. Так базы робот иногда все-таки касается и чуть-чуть сдвигает ее с места, а повороты в углах даются ему с некоторым трудом, и тут уж кто кого пересилит, или робот раздвинет то, что ему мешается, или он задерет заднюю часть, но все-таки повернет. Кстати, в узкие места, которые шире корпуса робота всего на 50 мм, и которые он может определить с помощью лидара, пылесос даже и не пытается заезжать — все равно он там не развернется. В итоге нам пришлось немного отступить от правил тестирования и увеличить ширину загона примерно до 45 см, что соответствует диагонали робота плюс 5 см (зазор по методике).
В целом, робот убирает быстро и качественно. Включение режима Eco почти не сказывается на качестве уборки, по крайней мере, нашего тестового мусора. После первого цикла уборки немного мусора остается около препятствий и на небольших участках, около базы робот убирает очень хорошо:
Из-за относительно широкой щетки робот иногда оставляет немного мусора в тех местах, где пол проседает. По завершении уборки робот отключает всасывающий вентилятор и привод щеток, затем быстро, целенаправленно и по возможности кратчайшим путем движется к месту перед базой, разворачивается на некотором расстоянии от нее задней частью с контактами к базе, медленно к ней приближается и, выполняя колебательные движения, неторопливо пристыковывается. Грубое определение местоположения базы выполняется, видимо, по составленной карте, но точная стыковка выполняется с использованием пассивных маячков на самой базе. Поэтому робот выполняет стыковку даже с неподключенной к электросети базой.
Пример использования ограничительной ленты приведен на следующей видеозаписи:
Ленту робот не пересекает, но может сдвигать, так что, видимо, ленту лучше закладывать под напольное покрытие или фиксировать на полу, например, с помощью двусторонней клейкой ленты. Примечательно, что робот явно запоминает расположение ленты и не пытается ее в дальнейшем пересекать, по крайней мере в пределах одного цикла уборки. К сожалению, в тесте, видеоролик которого показан выше, из-за черных и почти не отражающих стен робот потерял ориентацию. Две коробки помогли ему сохранять привязку к местности, и уборка успешно завершилась. Результат представлен на фотографии ниже:

В режиме локальной уборки робот убирает змейкой с прямыми углами. Согласно руководству размер убираемой зоны равен 2 на 2 м (7 на 7 футов) при запуске кнопкой или из меню, а при запуске из приложения размер области можно увеличить до 4 на 4 м (13 на 13 футов) и включить режим двойного прохода. Нетипично то, что робота нужно помещать по центру и перед убираемым участком. Вариант с большой областью (которая больше огороженной территории) и двойным проходом:
И область поменьше с однократной уборкой:
Уровень шума зависит от выбранного режима:
| Режим | Уровень шума, дБА |
| Eco | 59 |
| Turbo | 63 |
В режиме Turbo робот Neato Botvac Connected чуть шумнее, чем модель Botvac D85, а в режиме Eco заметно тише. При быстром движении робота колесные редукторы вносят существенный вклад в общий шум от робота, но в целом шум от вентилятора доминирует. Характер шума несильно раздражает, однако находиться в одной комнате с работающим роботом некомфортно, даже если он использует режим Eco.
При зарядке пылесоса на базе потребление от электросети составляет до 42 Вт в начале процесса. Если пылесос включен и находится на базе, то от сети потребляется примерно 2,8 Вт (Wi-Fi включен). Если пылесос убрать с базы, то потребление упадет до 0,4 Вт — столько потребляет сама база, включенная в сеть. На полную зарядку аккумулятора требуется примерно 1 час 50 минут. Аккумулятор без проблем может заменить пользователь самостоятельно, воспользовавшись обычной крестовой отверткой среднего размера. Судя по внешнему виду и габаритам, батарейный блок составлен из восьми цилиндрических элементов популярного типоразмера 18650.

Отметим, что это литий-ионная батарея может использоваться только с роботами Neato Botvac Connected. Весит она 376 г, против 589 г Ni-MH батареи у роботов Botvac Dxx. Кстати, масса робота равна 3,7 кг, что несколько меньше указанной производителем величины.
Тестируемый пылесос автономно в режиме Turbo убирает примерно полтора часа. Этого времени роботу хватило, чтобы в дополнительном тесте убрать тестовое помещение, состоящее из пяти комнат общей площадью примерно в 104 м². Отметим, что время, которое робот тратит на уборку, очень сильно зависит от количества мебели и ее вида. Например, пустой коридор робот убирает очень быстро, а в переговорной комнате, со столом и кучей плотно составленных стульев робот проводит много времени, тщательно обходя все ножки, убирая под стульями и столом. В итоге максимальная площадь, которую робот может убрать, зависит от конкретных условий. Так как циклов уборки с возвратом для зарядки может быть до трех подряд, то максимальная площадь, с которой может справиться робот на свежем аккумуляторе, в нашем случае составляет порядка 300 м² (правда, с учетом площади, занимаемой типичной офисной мебелью, но вряд ли в типичной квартире больше доступной роботу площади пола).
По окончании уборки почти весь мусор скопился на складчатом фильтре.

Отметим, что часть мусора проникла за сеточку на фильтре, и никак оттуда уже не удалялась, но все равно, чистить этот фильтр гораздо удобнее и быстрее, чем складчатый без сеточки. Проще всего, с нашей точки зрения, очищать пылесборник и фильтр с помощью обычного пылесоса с щелевой насадкой. Впрочем, это замечание относится ко всем роботам-пылесосам. Боковая щеточка собрала на себя немного волос:

Снять их не потребовало никакого труда. На основную щетку волос намоталось больше, их плотность чуть больше на торцах.

Однако щетка по длине от волос легко очистилась пальцами, использовать резак на гребенке не потребовалось. С
Полный текст статьи читайте на iXBT
