Робот-пылесос iRobot Roomba 880: подберет, не наматывая
Компания iRobot пополнила семейство роботов-пылесосов Roomba новой, теперь уже 800-й линейкой, состоящей на момент написания статьи из одной модели с номером 880 двух моделей: 870 и 880. По внешнему виду и функциональному оснащению эти роботы во многом напоминают роботов 700-й серии — 770 и 780 соответственно, но есть и значимые отличия: например, узел сбора мусора подвергся существенной модернизации, и теперь вместо лопастной и ворсовой щеток используются две безворсовые щетки.
Содержание:
Паспортные характеристики, комплект поставки и цена
Кинематическая система
Два ведущих колеса и подруливающий ролик
Способ сбора пыли
Инерционное перемещение и вакуумная фильтрация
Пылесборник
AeroForce, одно отделение для мусора, встроенный вентилятор, HEPA-фильтр
Основная щетка
Две безворсовые щетки-скребки
Боковые щетки
Одна
Дополнительно
Нет
Режимы очистки
Обычный, локальная очистка (Spot), ручное управление, уборка по расписанию
Эффективность очистки
Нет данных
Уровень шума
Нет данных
Датчики препятствий
Механический передний/боковой бампер, ИК-датчики приближения и перепада высоты
Датчики ориентации
ИК-датчик поиска базы и определения виртуальных стен/маяков, датчик вращения подруливающего ролика, датчики вращения ведущих колес
Управление на корпусе
Механические кнопки
Дистанционное управление
ИК-пульт ДУ (опционально — РЧ-пульт Wireless Command Center)
Оповещение
Светодиодная индикация, звуковые сигналы и голосовое оповещение об ошибках
Время автономной работы
Нет данных
Время зарядки
Нет данных
Способ зарядки
На зарядной базе с автоматическим возвратом
Аккумулятор
Батарея » iRobot XLife Battery» Advanced Ni-MH 14,4 В, 3000 мА·ч
Потребляемая мощность
Нет данных
Масса
3,8 кг
Размеры (диаметр×высота)
353×92 мм
Особенности
HEPA-фильтр, определение заполнения пылесборника, датчик загрязнения Dirt Detect 2 (акустический и оптический сенсоры), система «антипутаница», поддержка виртуальных стен, маяков и ограничителей
Комплект поставки*
Пылесос
Зарядная база
Кабель питания
Запасной фильтрующий элемент
Виртуальная стена/маяк, 2 шт. и два комплекта (по 2 шт.) элементов питания C
ИК-пульт ДУ и два элемента питания АА
Краткое руководство пользователя
Полное руководство пользователя
*Комплект поставки лучше уточнять перед покупкой.
Ссылка на сайт производителя
irobot.com иirobot.ru
Средняя цена по данным Яндекс.Маркет
T-10631807
Предложения по данным Яндекс.Маркет
L-10631807–10
Внешний вид
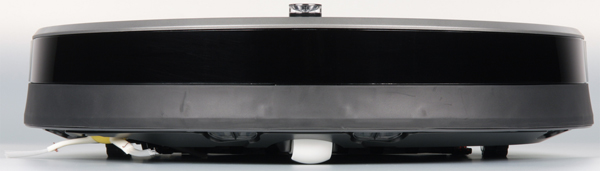
 Пылесос в плане имеет практически идеально круглую форму.
Пылесос в плане имеет практически идеально круглую форму.
 Скос от края к днищу помогает преодолевать препятствия, а некоторая угловатость сверху снижает вероятность того, что пылесос будет застревать под препятствиями с небольшим просветом.
Скос от края к днищу помогает преодолевать препятствия, а некоторая угловатость сверху снижает вероятность того, что пылесос будет застревать под препятствиями с небольшим просветом.
Корпус пластиковый, в основном черный, с матовой поверхностью и без покрытия. Периметр верхней панели, верхняя часть бампера и часть пылесборника имеют окантовку из пластика с серебристым темно-серым покрытием. Кольцеобразная накладка на верхней панели выполнена из ламинированного пластика с едва обозначенным концентрическим узором. Поверхность этой вставки относительно устойчива к повреждениям. Чего не скажешь о центральной части верхней панели, выполненной из темного тонированного в массе полупрозрачного пластика. Сквозь этот элемент корпуса просвечивают светодиодные индикаторы (подписи сенсорных кнопок, значок зарядки, сегментный индикатор часов и т. д.).
 В самом центре верхней панели находится круглая кнопка с серебристым покрытием и концентрическими канавками под точеный металл. Ободок этой кнопки, значок и надпись на ней подсвечиваются зеленым, когда робот находится в активном состоянии. Все кнопки механические. Сверху есть откидывающаяся вверх на небольшой угол ручка, за которую пылесос удобно переносить.
В самом центре верхней панели находится круглая кнопка с серебристым покрытием и концентрическими канавками под точеный металл. Ободок этой кнопки, значок и надпись на ней подсвечиваются зеленым, когда робот находится в активном состоянии. Все кнопки механические. Сверху есть откидывающаяся вверх на небольшой угол ручка, за которую пылесос удобно переносить.
 Тут есть небольшой эргономический просчет — ручка приподнимается за переднюю часть, но углубление для захвата пальцами очень мелкое. Под ручкой спрятан прикрытый резиновой заглушкой сервисный разъем (используется в частности для обновления программного обеспечения). Нижняя часть бампера окантована резиновой «юбочкой», предохраняющей мебель от царапин.
Тут есть небольшой эргономический просчет — ручка приподнимается за переднюю часть, но углубление для захвата пальцами очень мелкое. Под ручкой спрятан прикрытый резиновой заглушкой сервисный разъем (используется в частности для обновления программного обеспечения). Нижняя часть бампера окантована резиновой «юбочкой», предохраняющей мебель от царапин.
 Верхняя половина бампера прикрыта вставкой из пластика черного с виду, но прозрачного для ИК-излучения. Вверху по центру бампера — обзорный выступающий вверх ИК-датчик, который собственно и определяет минимальную высоту просвета предметов обстановки, под которые пылесос еще может забраться. Перевернув пылесос вверх днищем, мы видим две контактные площадки, подруливающий ролик, боковую щетку, крышку отсека АКБ, два ведущих колеса на подпружиненных рычагах, отсек с основными щетками и днище отсоединяемого пылесборника.
Верхняя половина бампера прикрыта вставкой из пластика черного с виду, но прозрачного для ИК-излучения. Вверху по центру бампера — обзорный выступающий вверх ИК-датчик, который собственно и определяет минимальную высоту просвета предметов обстановки, под которые пылесос еще может забраться. Перевернув пылесос вверх днищем, мы видим две контактные площадки, подруливающий ролик, боковую щетку, крышку отсека АКБ, два ведущих колеса на подпружиненных рычагах, отсек с основными щетками и днище отсоединяемого пылесборника.
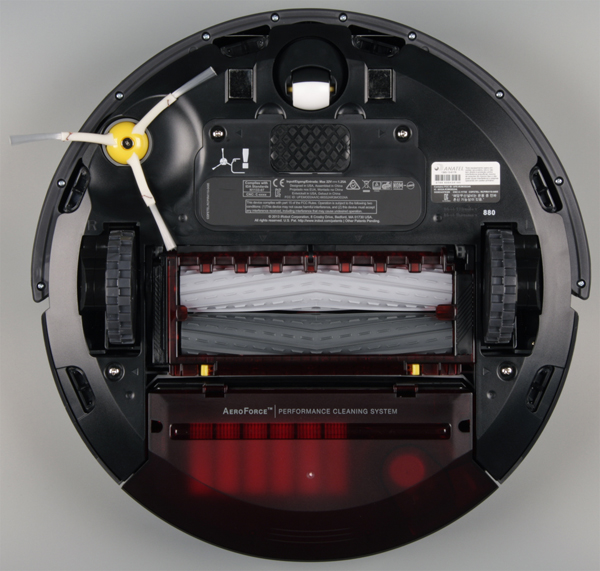 По периметру днища ближе к краю расположены шесть ИК-датчиков перепада высоты.
По периметру днища ближе к краю расположены шесть ИК-датчиков перепада высоты.
 База, на которой пылесос подзаряжается, имеет в точности такие же габариты, что и база пылесосов 500/600/700-й серий, но теперь блок питания встроен в саму базу.
База, на которой пылесос подзаряжается, имеет в точности такие же габариты, что и база пылесосов 500/600/700-й серий, но теперь блок питания встроен в саму базу.
 Это можно только приветствовать — нет внешнего БП и дополнительных проводов, которые постоянно мешались, и база стала немного тяжелее, что повысило ее устойчивость. И да, в 800-й убрали внешний разъем питания на корпусе робота, который позволял заряжать устройство, минуя базу, но и который вызывал много проблем. Штатный кабель питания относительно короткий — 930 см, но, при необходимости, найти ему замену труда не составит, так как разъем на базе представляет собой стандартную «восьмерку». Снизу на основание базы приклеены небольшая резиновая площадка и составная площадка побольше из поролона и какого-то другого пористого материала в шашечку.
Это можно только приветствовать — нет внешнего БП и дополнительных проводов, которые постоянно мешались, и база стала немного тяжелее, что повысило ее устойчивость. И да, в 800-й убрали внешний разъем питания на корпусе робота, который позволял заряжать устройство, минуя базу, но и который вызывал много проблем. Штатный кабель питания относительно короткий — 930 см, но, при необходимости, найти ему замену труда не составит, так как разъем на базе представляет собой стандартную «восьмерку». Снизу на основание базы приклеены небольшая резиновая площадка и составная площадка побольше из поролона и какого-то другого пористого материала в шашечку.
 В итоге база хорошо цепляется за полы с самой разнообразной поверхностью, но в случае чего закрепить базу на полу можно с помощью, например, двусторонней клейкой ленты. Отметим, что база полностью взаимозаменяема с комплектом из базы и БП от предыдущих моделей Roomba.
В итоге база хорошо цепляется за полы с самой разнообразной поверхностью, но в случае чего закрепить базу на полу можно с помощью, например, двусторонней клейкой ленты. Отметим, что база полностью взаимозаменяема с комплектом из базы и БП от предыдущих моделей Roomba.
Пылесос комплектуется ИК-пультом ДУ и двумя навигационными устройствами виртуальная стена/маяк, и ко всему этому приложены щелочные (!) элементы питания известного производителя. Кроме того, в коробке мы обнаружили один запасной фильтрующий элемент.
 Документация состоит из описания гарантийных обязательств, краткого руководства пользователя, пары вспомогательных листиков и полного руководства пользователя на нескольких языках. Русская версия руководства выдается при продаже в России в виде отдельной брошюры. Упакован пылесос в относительно большую коробку с пластиковой ручкой.
Документация состоит из описания гарантийных обязательств, краткого руководства пользователя, пары вспомогательных листиков и полного руководства пользователя на нескольких языках. Русская версия руководства выдается при продаже в России в виде отдельной брошюры. Упакован пылесос в относительно большую коробку с пластиковой ручкой.
 Оформление коробки строгое, но насыщенное — фотографии, рисунки, схемы, перечисление комплектации и описание основных функций. Внутри коробки в качестве разделителей и защитных вставок используются элементы из экологически безопасного гофрированного картона. Доставили нам пылесос упакованным в еще одну внешнюю невзрачную коробку из гофрированного картона, из которой высовывалась ручка от внутренней коробки.
Оформление коробки строгое, но насыщенное — фотографии, рисунки, схемы, перечисление комплектации и описание основных функций. Внутри коробки в качестве разделителей и защитных вставок используются элементы из экологически безопасного гофрированного картона. Доставили нам пылесос упакованным в еще одну внешнюю невзрачную коробку из гофрированного картона, из которой высовывалась ручка от внутренней коробки.
 Этот вариант упаковки можно только приветствовать, так как «красивая» внутренняя коробка подходит для хранения пылесоса и аксессуаров, но при транспортировке она делает вид, что вот-вот раскроется и все из нее выпадет. Опять же лишний раз пачкать ее не хочется.
Этот вариант упаковки можно только приветствовать, так как «красивая» внутренняя коробка подходит для хранения пылесоса и аксессуаров, но при транспортировке она делает вид, что вот-вот раскроется и все из нее выпадет. Опять же лишний раз пачкать ее не хочется.
Функционирование О функциях пылесоса можно нужно прочитать в прилагаемом руководстве пользователя. Тем, кто только присматривается к подобной технике, можно порекомендовать загрузить руководство с русского сайта компании-производителя (когда оно там появится — на американском сайте руководство на английском языке есть), и внимательно его изучить.
Оси ведущих колес расположены на одном диаметре окружности корпуса. Такая кинематическая схема позволяет роботу совершать разворот на месте без изменения границ, занимаемой роботом площади, поэтому пылесос отличается хорошей маневренностью. Диаметр ведущих колес относительно большой (71 мм), а ход шарниров в точке центров колес достигает почти 30 мм, поэтому робот без особых проблем преодолевает встречающиеся препятствия небольшой глубины и высоты. Потенциально робот способен преодолевать препятствия высотой где-то до 18 мм — примерно такое расстояние от пола до нижней точки бампера пылесоса, что согласуется с проходимостью, то есть робот не будет пытаться залезть на то, на чем застрянет.
При уборке передняя щеточка подгребает мусор к центру. Правильной работе этой щеточки способствует наклон ее оси внутрь, благодаря чему прижим сильнее на фазе движения сбоку-вперед. Также отметим конструкцию боковой щеточки — гибкие упругие поводки (для прочности прошитые на концах) заканчиваются относительно жесткой прямой щетиной.
 В результате щеточка работает весьма эффективно и не теряет свою форму. Саморез, фиксирующий эту щетку теперь имеет и широкий прямой паз, поэтому снять и установить щетку можно без крестовой отвертки, достаточно монеты (текущий рубль подходит). При этом прямая и обратная совместимость с боковыми щетками от предыдущих моделей сохранилась.
В результате щеточка работает весьма эффективно и не теряет свою форму. Саморез, фиксирующий эту щетку теперь имеет и широкий прямой паз, поэтому снять и установить щетку можно без крестовой отвертки, достаточно монеты (текущий рубль подходит). При этом прямая и обратная совместимость с боковыми щетками от предыдущих моделей сохранилась.
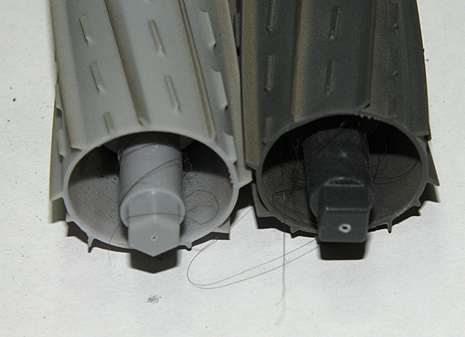
Основных щеток две, они вращаются навстречу друг другу. В 800-й это не совсем щетки, так как они лишены ворса, но мы будем по привычке называть их щетками (в русском руководстве используется сложное название валики-скребки, в английском — extractor). Прецеденты есть — первые щетки для очистки ветрового стекла автомобилей также были со щетиной, а сейчас они трансформировались в резиновые скребки, но название детали осталось прежним. Щетки не взаимозаменяемые, но конструкцию имеют одинаковую: внешний упругий цилиндр с ребрами (не резиновый, а скорее из силикона), закрепленный на оси из твердого пластика. С одной стороны эта ось продолжена шпилькой из нержавеющей стали, на которую надета желтая пластиковая втулка с бронзовым подшипником скольжения. С другой — ось заканчивается шестигранником или квадратом, что соответствует ответной части в механизме вращения щеток.
 Дополнительную упругость внешней оболочке щеток придает находящийся внутри цилиндров наполнитель из поролона. Вращающиеся щетки сначала подхватывают мусор с пола, затем мусор воздушным потоком перемещается в емкость пылесборника. Тяжелый мусор остается на дне емкости, а мелкий и легкий задерживается воздушным фильтром. Примерная схема, представленная ниже, демонстрирует основной принцип сбора мусора:
Дополнительную упругость внешней оболочке щеток придает находящийся внутри цилиндров наполнитель из поролона. Вращающиеся щетки сначала подхватывают мусор с пола, затем мусор воздушным потоком перемещается в емкость пылесборника. Тяжелый мусор остается на дне емкости, а мелкий и легкий задерживается воздушным фильтром. Примерная схема, представленная ниже, демонстрирует основной принцип сбора мусора:
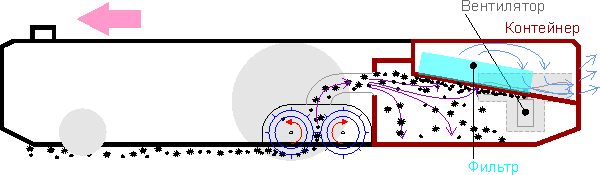 И схема-рисунок производителя:
И схема-рисунок производителя:
 Отметим, что такая конструкция не исключает прямой заброс тяжелых частиц в пылесборник, но делает его маловероятным, в отличие от предыдущего варианта с большой щеткой с ворсом. Стыки узлов и деталей на всем пути воздуха от щеток до выхлопной решетки сзади имеют упругие уплотнения, а щеточный узел соединен с корпусом упругим и герметичным воздушным рукавом, что уменьшает паразитный подсос воздуха. Также производитель обещает увеличенную мощность вентилятора. Тем не менее, все равно некоторые сомнения в реальной эффективности такой системы сбора мусора остаются. Посмотрим, что покажут тесты.
Отметим, что такая конструкция не исключает прямой заброс тяжелых частиц в пылесборник, но делает его маловероятным, в отличие от предыдущего варианта с большой щеткой с ворсом. Стыки узлов и деталей на всем пути воздуха от щеток до выхлопной решетки сзади имеют упругие уплотнения, а щеточный узел соединен с корпусом упругим и герметичным воздушным рукавом, что уменьшает паразитный подсос воздуха. Также производитель обещает увеличенную мощность вентилятора. Тем не менее, все равно некоторые сомнения в реальной эффективности такой системы сбора мусора остаются. Посмотрим, что покажут тесты.
Днище пылесборника выполнено из прозрачного тонированного красным пластика, но прозрачной оставлена только узкая полоска, остальная поверхность заматирована, поэтому визуально, просто осмотрев робота, о степени заполнения пылесборника судить сложно.
 Очищать пылесборник относительно просто: откидывается шторка и пыль вытряхивается. Затем вынимается и очищается HEPA-фильтр.
Очищать пылесборник относительно просто: откидывается шторка и пыль вытряхивается. Затем вынимается и очищается HEPA-фильтр.
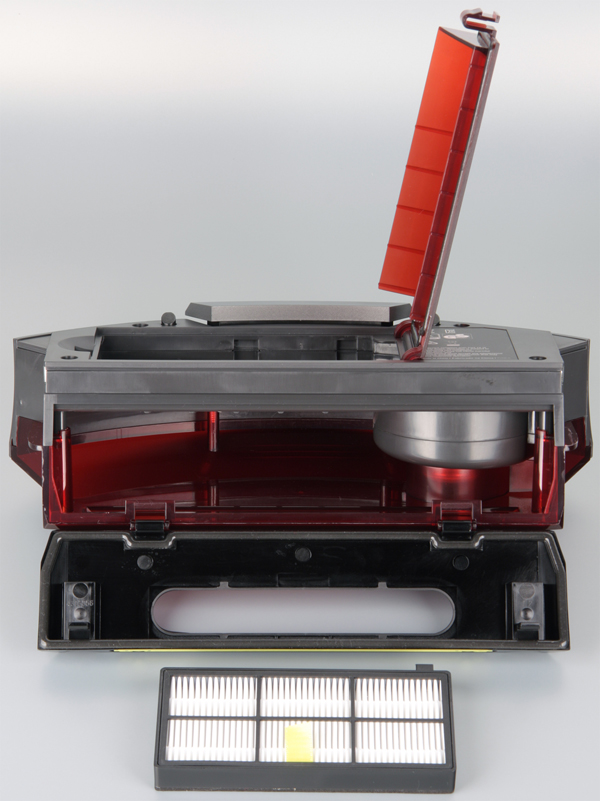 Заметим, что в этом фильтре сначала идет крупноячеистая сеточка, которая не допускает крупную пыль до складчатого мелкопористого фильтра. Это облегчает чистку фильтрующего элемента и повышает его долговечность. Отсоединять пылесборник относительно удобно, но не всегда удается сделать это одной рукой, не сдвигая припаркованный на базе пылесос.
Заметим, что в этом фильтре сначала идет крупноячеистая сеточка, которая не допускает крупную пыль до складчатого мелкопористого фильтра. Это облегчает чистку фильтрующего элемента и повышает его долговечность. Отсоединять пылесборник относительно удобно, но не всегда удается сделать это одной рукой, не сдвигая припаркованный на базе пылесос.
Отсек, в котором находятся основные щетки, закреплен на рычажках, поэтому с ходом примерно в 9 мм он следует рельефу пола, что увеличивает эффективность очистки. Проволочных направляющих-ограничителей теперь нет, что при первичном осмотре вызвало некоторые опасения — как бы пылесос не стал часто наматывать уголки ковриков.
На фотографии ниже обозначены элементы системы определения степени загрязнения Dirt Detect 2, перешедшей по наследству от предыдущей модели.
 В состав Dirt Detect 2 входят ультразвуковой (обведен пурпурным) и оптический (обведен зеленым) датчики. Первый датчик по изменению акустических свойств определяет наличие частиц в щеточном отсеке, что дает сведения о степени загрязнения в текущем месте уборки. Второй датчик, состоящий из источника ИК-излучения и фотоприемника, просвечивает пылесборник сразу за шторкой. Соответствующее изменение степени поглощения в ИК-диапазоне позволяет также отслеживать содержание пыли в потоке воздуха, и дополнительно, указывает на переполнение пылесборника.
В состав Dirt Detect 2 входят ультразвуковой (обведен пурпурным) и оптический (обведен зеленым) датчики. Первый датчик по изменению акустических свойств определяет наличие частиц в щеточном отсеке, что дает сведения о степени загрязнения в текущем месте уборки. Второй датчик, состоящий из источника ИК-излучения и фотоприемника, просвечивает пылесборник сразу за шторкой. Соответствующее изменение степени поглощения в ИК-диапазоне позволяет также отслеживать содержание пыли в потоке воздуха, и дополнительно, указывает на переполнение пылесборника.
Все, что требует частого внимания со стороны пользователя, обозначено желтым цветом. Подробно, как ухаживать за роботом, описано в руководстве пользователя, поэтому не будем повторяться. Отметим только, что в том же руководстве есть схема, поясняющая, какие модули робота пользователь при необходимости может заменить самостоятельно — щеточный модуль, колесные приводы, привод боковой щетки и даже верхнюю кольцевую панель. В этот список, разумеется, входит и аккумуляторная батарея.
 Внешне (кроме цвета) и по характеристикам новая батарея не отличается от предыдущего «желтого» варианта и полностью с ним совместима (и старые роботы могут работать с новой батареей), однако производитель обещает увеличенный вдвое срок службы. Это, конечно, очень приятное усовершенствование, так как предыдущий аккумулятор заметно терял емкость года за два щадящей эксплуатации робота. С доступностью расходных материалов и запасных частей для Roomba актуальных моделей, как правило, все очень хорошо. Впрочем, как показывает опыт использования предыдущих моделей, щетки, фильтры и механика при соответствующем уходе служат очень долго.
Внешне (кроме цвета) и по характеристикам новая батарея не отличается от предыдущего «желтого» варианта и полностью с ним совместима (и старые роботы могут работать с новой батареей), однако производитель обещает увеличенный вдвое срок службы. Это, конечно, очень приятное усовершенствование, так как предыдущий аккумулятор заметно терял емкость года за два щадящей эксплуатации робота. С доступностью расходных материалов и запасных частей для Roomba актуальных моделей, как правило, все очень хорошо. Впрочем, как показывает опыт использования предыдущих моделей, щетки, фильтры и механика при соответствующем уходе служат очень долго.
Тем, кто не читает руководства по эксплуатации, настоятельно рекомендуем прочитать хотя бы два нижеследующих абзаца:
Предупредим, что этот пылесос недопустимо использовать во влажном помещении или на поверхностях с разлитыми жидкостями. После контакта пылесоса с жидкостями в лучшем случае придется долго очищать его от налипшего слоя пыли, в худшем случае пылесос может выйти из строя.
Ни одну из частей пылесоса недопустимо мыть под водой — ни щетки, ни фильтр, ни сам пылесборник. Единственное, что допускается, так это протирать робота смоченной водой (так, чтобы не капало) тряпкой.
iRobot Roomba 880 имеет три основных режима уборки:
1. Автоматическая уборка всей доступной площади. По окончании уборки пылесос возвращается на базу.
2. Режим локальной очистки (режим Spot) — интенсивная очистка определенного участка. В нужное место пылесос переносится пользователем или направляется с помощью пульта ДУ.
3. Режим с ручным управлением.
Запускаются режимы нажатием кнопок на корпусе пылесоса или на пульте ДУ: Clean — запуск в обычном режиме, Spot — режим локальной очистки. Нажатие на кнопку Dock (три точки на пульте) — включает режим принудительного возврата на базу. Запуск автоматического режима уборки можно назначить на определенное время в любой день недели, при этом время запуска устанавливается (или не устанавливается) своё на каждый из семи дней. Если расписание создано, то в заданное время пылесос съедет с базы, проведет уборку и вернется на базу. Пульт ДУ позволяет вручную управлять движением (и уборкой, так как одновременно с передвижением пылесос убирает) робота.
 Команд движения всего пять: вперед, повороты на месте вправо и влево, движение вперед с поворотом вправо или влево (при нажатии между стрелками вперед и правой или левой). Команды движения назад нет. Робот движется только тогда, когда нажата кнопка пульта. При столкновении с препятствием пылесос автоматически выполняет маневр уклонения (поворот), а при движении вблизи базы автоматически включается режим возврата на базу.
Команд движения всего пять: вперед, повороты на месте вправо и влево, движение вперед с поворотом вправо или влево (при нажатии между стрелками вперед и правой или левой). Команды движения назад нет. Робот движется только тогда, когда нажата кнопка пульта. При столкновении с препятствием пылесос автоматически выполняет маневр уклонения (поворот), а при движении вблизи базы автоматически включается режим возврата на базу.
Пространственно организовать уборку помогут навигационные устройства, входящие в комплект поставки (и, при необходимости, докупаемые дополнительно).
 Эти устройства работают от двух элементов питания типа LR14 (или C, или А343, можно использовать и солевые). Устройства могут работать в двух режимах — виртуальная стена (Virtual Wall) и маяк (Lighthouse). В первом случае в направлении от устройства создается виртуальная преграда, которую пылесос не пересекает. С помощью этой виртуальной стены можно отгородить места, где выполнять уборку нежелательно. Режим маяка используется для установления последовательности уборки: заехав в помещение/закуток, ограниченное маяком, пылесос останется в нем, пока не уберет это пространство. Режим работы и длина виртуального барьера выбираются переключателями на корпусе устройства. Включаются устройства автоматически при запуске пылесоса в режиме уборки (для этого используется радиочастотный сигнал), выключаются тоже автоматически после окончания уборки. Такой режим удобнее, чем ручное включение «обычных» виртуальных стен, которыми комплектуются более дешевые модели Roomba, и существенно сокращает расход заряда элементов питания. В качестве опции к роботу можно докупить и такие «обычные» виртуальные стены (Auto Virtual Wall), а также устройство (круговой ограничитель или Virtual Halo), схожее по принципу, но создающее не направленный барьер, а круговую зону вокруг себя, куда робот не допускается.
Эти устройства работают от двух элементов питания типа LR14 (или C, или А343, можно использовать и солевые). Устройства могут работать в двух режимах — виртуальная стена (Virtual Wall) и маяк (Lighthouse). В первом случае в направлении от устройства создается виртуальная преграда, которую пылесос не пересекает. С помощью этой виртуальной стены можно отгородить места, где выполнять уборку нежелательно. Режим маяка используется для установления последовательности уборки: заехав в помещение/закуток, ограниченное маяком, пылесос останется в нем, пока не уберет это пространство. Режим работы и длина виртуального барьера выбираются переключателями на корпусе устройства. Включаются устройства автоматически при запуске пылесоса в режиме уборки (для этого используется радиочастотный сигнал), выключаются тоже автоматически после окончания уборки. Такой режим удобнее, чем ручное включение «обычных» виртуальных стен, которыми комплектуются более дешевые модели Roomba, и существенно сокращает расход заряда элементов питания. В качестве опции к роботу можно докупить и такие «обычные» виртуальные стены (Auto Virtual Wall), а также устройство (круговой ограничитель или Virtual Halo), схожее по принципу, но создающее не направленный барьер, а круговую зону вокруг себя, куда робот не допускается.
О своем состоянии пылесос информирует с помощью светодиодных индикаторов, кроме того, о переходах между некоторыми состояниями пылесос сообщает, проигрывая короткую мелодию, а об ошибках он информирует, проговаривая соответствующую фразу на выбранном пользователем языке (процедура смены языка описана в руководстве, русский язык доступен, но вместо развернутого сообщения на русском проговаривается только номер ошибки). Отключить звуковое/голосовое оповещение нельзя.
Тестирование Ниже представлены результаты тестирования по нашей методике, подробно описанной в отдельной статье.
Режим Время уборки*, ММ: СС % С повторами 15:41 94,5 Первый повтор 15:37 98,0 (суммарный) Второй повтор 15:01 99,0 (суммарный) С повторами 20:10 97,3 Первый повтор 22:57 98,7 (суммарный) Второй повтор 19:08 99,1 (суммарный) Фиксированный интервал, первые 10 мин. 10:00 89,7 Фиксированный интервал, вторые 10 мин. 10:00 97,9 (суммарный) Фиксированный интервал, третьи 10 мин. 10:00 98,7 (суммарный) Фиксированный интервал, первые 10 мин. 10:00 85,6 Фиксированный интервал, вторые 10 мин. 10:00 97,2 (суммарный) Фиксированный интервал, третьи 10 мин. 10:00 98,6(суммарный) Видео ниже снято сверху с одной точки, база находится внизу по центру, при обработке часть видеоряда ускорена в десять раз:
Проведенные тесты позволяют сделать некоторые предварительные выводы. В автоматическом режиме на уборку нашего тестового участка робот тратит от 15 до 23 минут, после чего возвращается на базу. Как правило, за первый заход убирается более 90% мусора. Последующие заходы увеличивают процент до 99%:
 Неубранными остаются минимальные участки в труднодоступных местах и в самых уголках, куда этот пылесос не может ни заехать, ни дотянуться боковой щеточкой:
Неубранными остаются минимальные участки в труднодоступных местах и в самых уголках, куда этот пылесос не может ни заехать, ни дотянуться боковой щеточкой:


А также около базы, которую робот обходит на некотором расстоянии:
 При этом не было случая, чтобы пылесос сдвинул базу после начала уборки, и робот всегда заезжал на базу с первого раза. Можно предположить, что робот как-то оценивает убираемую площадь, например, исходя из среднего расстояния от препятствия до препятствия, и на основании этого определяет требуемое время уборки. В нашем случае это время можно считать близким к оптимальному, так как дальнейшее увеличение времени уборки (свыше 20–30 минут) уже не приводит к существенному росту процента убираемого мусора. Робот не обладает способностью решать навигационные задачи дальнего порядка, впрочем, принимать решения относительно следующего направления движения, а также выбираться из сложных мест и выпутываться из проводов роботу помогают ИК-датчики приближения, механический бампер, отслеживание вращения ведущих колес и щеток, отслеживание перемещения с помощью оптического датчика, регистрирующего вращение подруливающего ролика (не зря он наполовину черный, а на половину белый).
При этом не было случая, чтобы пылесос сдвинул базу после начала уборки, и робот всегда заезжал на базу с первого раза. Можно предположить, что робот как-то оценивает убираемую площадь, например, исходя из среднего расстояния от препятствия до препятствия, и на основании этого определяет требуемое время уборки. В нашем случае это время можно считать близким к оптимальному, так как дальнейшее увеличение времени уборки (свыше 20–30 минут) уже не приводит к существенному росту процента убираемого мусора. Робот не обладает способностью решать навигационные задачи дальнего порядка, впрочем, принимать решения относительно следующего направления движения, а также выбираться из сложных мест и выпутываться из проводов роботу помогают ИК-датчики приближения, механический бампер, отслеживание вращения ведущих колес и щеток, отслеживание перемещения с помощью оптического датчика, регистрирующего вращение подруливающего ролика (не зря он наполовину черный, а на половину белый).
Судя по характеру движения во время уборки, робот перебирает несколько вариантов движения, выбираемых в зависимости от текущего состояния, какой-то предыстории и случайным образом. Мы определили четыре варианта:
Вариант первый — движение от препятствия до препятствия с последующей сменой направления. Используется для перемещения по комнате и из комнаты в комнату и, возможно, для оценки доступной площади.
Вариант второй — веерообразное движение с возвратом в исходную точку. Используется для очистки сильно загрязненных мест. При этом используется информация с ультразвукового датчика, размещенного в отсеке со щетками, и оптического датчика в пылесборнике.
Вариант третий — движение вдоль препятствия правым боком (где боковая щеточка) к нему на небольшом расстоянии (15–20 мм) от препятствия — до срабатывания ИК-датчика приближения. Используется для быстрой очистки вокруг, например, ножек стула и т. д., а также вдоль стен.
Вариант четвертый — то же, что и третий вариант, но до срабатывания механического бампера (получается пилообразное движение), что позволят роботу убирать практически впритык к препятствию. Иногда робот двигался вдоль препятствия аналогичным образом, но касаясь левым боком.
Независимо от варианта движения робот всегда убирает — вращает боковой и основными щетками и прогоняет воздух вентилятором. При затрудненном вращении боковой или основных щеток включается алгоритм высвобождения — робот выключает приводы этих щеток, но не прекращает движения. В итоге то, что на щетки намоталось, сматывается обратно. Узкий загончик (шириной на 5 см шире корпуса робота) не представлял для пылесоса особо сложной задачи — как правило, он заезжал в него в течение первого цикла уборки, а, заехав, довольно быстро из него выбирался. На фрагментах видео, снятых в режиме слежения, можно подробно рассмотреть особенности работы робота, включая автоматический возврат на базу:
В режиме локальной очистки (Spot) робот убирает по разворачивающейся и затем сворачивающейся спирали, так как это демонстрирует видео ниже:
В этом режиме робот убирает в почти круге диаметром 1,2–1,3 м. Дополнительно были испытаны устройства навигации в режимах виртуальная стена (Virtual Wall) и маяк (Lighthouse). Для этого оба устройства мы расположили примерно в центре тестового участка (без препятствий), одно мы переключили в режим виртуальной стены и направили в центр дальней стены (красный луч на заставке видео), второе — в режиме маяка направили в центр левой стены (желтый луч). Предохранительная ограничивающая зона условно обозначена пурпурной границей, а направляющие лучи маяка — зеленым. Таким образом мы разделили тестовый участок на две зоны. Что получилось, демонстрирует ускоренное в 25 раз видео ниже:
В итоге робот примерно 29 минут убирал в основной части, после чего заехал в выгороженный участок, убирал там 14 минут и быстро вернулся на базу. Результат соответствует ожидаемому.
Дополнительно были проведены натурные испытания. В первом тесте мы испытывали в основном систему ориентации с помощью маяков. Для этого в офисном и относительно чистом помещении был выгорожен участок из трех помещений, обозначенных на схеме как А (28,4 м² — «прихожая»), Б (23,3 м² — «коридор») и В (18,5 м² — «комната»). База установлена в помещении А, а маяки — на границах А—Б и Б—В (мебель и прочее — столы, кресла, аквариум и т. д. на схеме не показаны, маяки — черные кружочки с желтыми лучами):
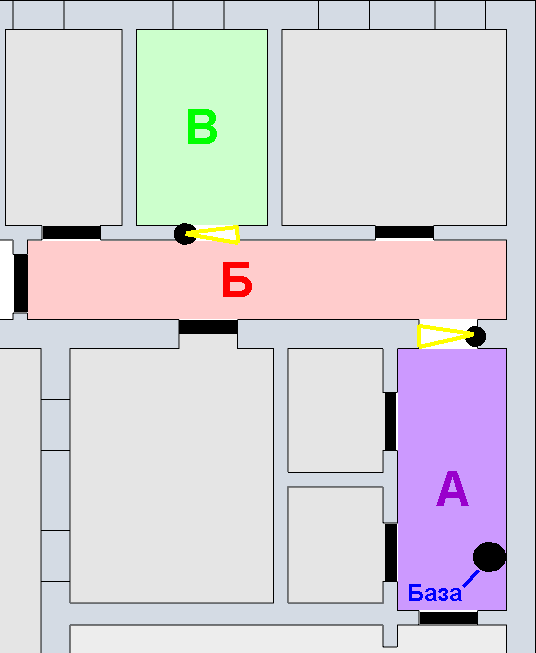 Робот в паре с маяками полностью оправдал наши ожидания. При запуске с базы робот 29 минут убирал в помещении А, затем переместился в помещение Б и убирал там 26 минут, заехал в комнату В, где провел 21 минуту, всего 3 минуты покатался в коридоре и еще через пару минут уже был на базе. Маяки «заставили» робота провести в помещениях время, в общем-то, пропорциональное их площади, и быстренько «сопроводили» трудягу обратно на базу по завершении миссии чистоты.
Робот в паре с маяками полностью оправдал наши ожидания. При запуске с базы робот 29 минут убирал в помещении А, затем переместился в помещение Б и убирал там 26 минут, заехал в комнату В, где провел 21 минуту, всего 3 минуты покатался в коридоре и еще через пару минут уже был на базе. Маяки «заставили» робота провести в помещениях время, в общем-то, пропорциональное их площади, и быстренько «сопроводили» трудягу обратно на базу по завершении миссии чистоты.
Исследование с пристрастием показало, что крупный песок действительно плохо переносится с потоком воздуха и может какое-то время болтаться в щеточном отсеке:
 Боковая щеточка традиционно наматывает на себя длинные волосы:
Боковая щеточка традиционно наматывает на себя длинные волосы:
 А вот основные щетки нового дизайна удивили. Да, намотавшиеся волосы были обнаружены на обоих торцах (и только на торцах!):
А вот основные щетки нового дизайна удивили. Да, намотавшиеся волосы были обнаружены на обоих торцах (и только на торцах!):
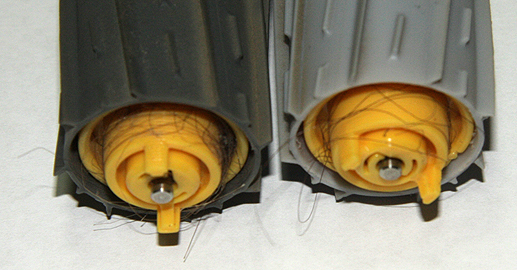
Но намотка была очень рыхлой, и все намотавшееся было быстро всосано обычным пылесосом. Разительное отличие от ситуации со щетками в предшествующих моделях Roomba, где на торцах образовывались трудно удаляемые «войлочные» шайбы, а колтуны на основной щетке с ворсом удалялись только с помощью гребенки и/или длительным прочесыванием обычным пылесосом с установленной щелевидной насадкой.
На втором этапе натурных испытаний новый робот соревновался в качестве уборки с далеко не новым (но в хорошем состоянии) iRobot Roomba 531 (с установленным пылесборником AeroVac) в условиях слегка захламленного жилого помещения. Результаты этих тестов однозначными не получились, так как при попеременном запуске на уборку, то один робот приносил больше мусора после второго, то наоборот. Впрочем, выводы про то, что на новые щетки ничего не наматывается, подтвердились, а опасения, что незащищенные проволочными ограничителями щетки-валики будут наматывать уголки ковриков, не подтвердились. Вернее они наматываются, но, благодаря системе «антипутаница» робот моментально высвобождается из ловушки, не прерывая уборку, только значок-индикатор включения этого режима подмаргивает.
Во всех режимах шумит робот примерно одинаково, только при резких маневрах заметно повышается шум приводов. Уровень шума мы измеряли в режиме локальной уборки, в котором робот дольше движется вблизи микрофона:
Режим Уровень шума, дБА, среднее Локальной очистки 60 Для сравнения уровень шума в этих условиях обычного (не самого тихого) пылесоса равен примерно 76,5 дБА. Робот работает относительно громко (смотреть кино в комнате, где он убирает, не очень приятно), но несколько тише, чем предыдущие модели серий 500/600/700. Кажется, что в 880 меньше «механического» жужжания щеточного узла и вентилятора. В целом звук не является неприятным. Запускать в ночное время его можно, но только в соседнем от спальной комнаты помещении, и желательно за дверями с хорошей звукоизоляцией.
Полностью заряженный пылесос может убирать в течение 2 часов 25 минут. На полный заряд батареи уходит немногим больше двух часов (у нас получилось 2 часа и 7 минут). В процессе зарядки пылесоса на базе потребление от электросети равно 28–29 Вт. Если пылесос включен, заряжен и находится на базе, то от сети потребляется 3,6–3,8 Вт. Если пылесос убрать с базы, то потребление упадет до 0,5–0,6 Вт — столько потребляет сама база, включенная в сеть.
Выводы Мы не будем утверждать, что новшества, реализованные в роботах 800-серии, а именно безворсовые щетки-скребки и пылесборник новой конструкции, кардинально повышают качество уборки. Согласно нашим тестам 880 убирает если и лучше 780-й модели, то ненамного. Однако обслуживать новые модели Roomba точно проще и удобнее, так как на щетки-валики практически не наматываются волосы, шерсть, нитки и прочее, а намотавшееся на торцы легко удаляется. Это особенно должны оценить владельцы шерстистых кошек и собак. Кроме того, новый HEPA-фильтр увеличенной площади и с защитной сеточкой должен дольше сохранять эффективность, как в течение цикла уборки, так и в целом в процессе эксплуатации пылесоса. И, конечно, нельзя не отметить новую аккумуляторную батарею с увеличенным сроком службы.
Достоинства: Высокое качество уборки вдоль стен, вокруг препятствий и на открытой площади Легкая очистка основных щеток Поддержка межкомнатной навигации, виртуальных стен и круговых ограничителей Система против запутывания Датчик переполнения пылесборника и два типа датчиков загрязнения Бережное отношение к мебели — замедление перед препятствием и мягкая накладка на бампере Режим уборки по расписанию Хорошая комплектация — запасной фильтр, пульт ДУ, два устройства навигации Virtual Wall Lighthouse и полный комплект щелочных элементов питания Голосовое оповещение Хорошая локализация для России Недостатки: Значимых нет Благодарим компанию «НоркПалм», являющуюся официальным партнером iRobot Corporation, за предоставленный на тестирование робот-пылесос iRobot Roomba 880
Полный текст статьи читайте на iXBT
