Робот-пылесос iClebo Pop: упрощенный вариант корейской компании Yujin Robot
Мы уже тестировали робота iClebo Arte — продвинутую модель корейской компании Yujin Robot. В портфолио этого производителя входит и упрощенный вариант робота-уборщика, без камеры, без «умной» навигации и без второй боковой щеточки. Это робот iClebo Pop, обзор которого мы предлагаем нашим читателям.
Содержание:
Паспортные характеристики, комплект поставки и цена
Кинематическая система
Два ведущих колеса и фиксированный опорный ролик
Способ сбора пыли
Инерционное перемещение и вакуумная фильтрация
Пылесборник
Одно отделение
Основная щетка
Одна с ворсом
Боковые щетки
Одна
Дополнительно
Протирочная насадка из микрофибры и резиновый скребок
Режимы очистки
Автоматический с ограничением по времени, максимальный до разряда аккумулятора, локальный, ручной
Скорость движения
30 см/с (максимальная)
Уровень шума
58 дБА
Датчики препятствий
Механический передний/боковой бампер, ИК-датчики приближения и перепада высоты
Датчики ориентации
ИК-датчик поиска базы, датчик вращения ведущих колес
Управление на корпусе
Сенсорные кнопки
Дистанционное управление
ИК-пульт ДУ
Оповещение
Светодиодная индикация и звуковые сигналы
Время автономной работы
До 120 мин.
Время зарядки
110 мин.
Способ зарядки
На зарядной базе с автоматическим возвратом или от блока питания
Батарея
Литий-ионный аккумулятор, 14,8 В, 2200 мА·ч
Потребляемая мощность
10 Вт при работе, менее 1,4 Вт на базе в режиме ожидания
Масса
2,75 кг
Размеры (диаметр×высота)
∅350×89 мм
Особенности
Режим преодоления препятствий высотой до 20 мм
Комплект поставки
Пылесос
Зарядная база
Блок питания (100—240 В, 50/60 Гц на 19 В, 2,5 А)
Кабель питания
ИК пульт ДУ и два элемента питания ААА для него
Руководство пользователя
Боковая щетка
Запасной фильтр пылесборника, 2 шт.
Щетка+гребень для очистки фильтра / датчиков (убрана в базу)
Накладка из микрофибры, 2 шт.
Поддон для накладки
Ссылка на сайт производителя
iclebo.com.ru
Средняя цена по данным Яндекс.Маркет
T-9362911
Предложения по данным Яндекс.Маркет
L-9362911–10
Внешний вид
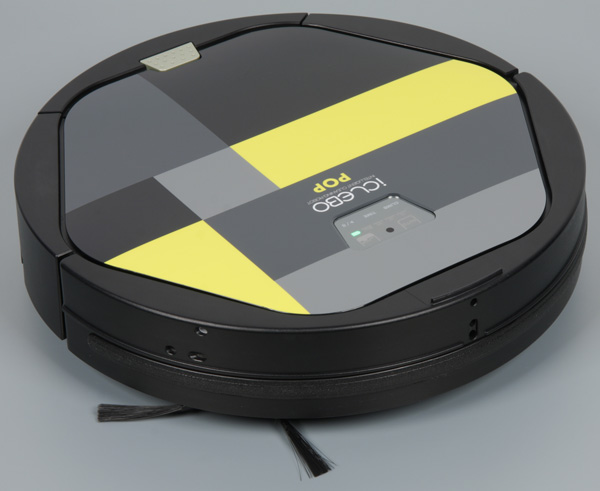 Пылесос в плане имеет почти идеально круглую форму, почти, так как радиус закругления полукруглого бампера чуть-чуть больше радиуса задней половины корпуса. Края снизу скошены, что помогает роботу преодолевать препятствия.
Пылесос в плане имеет почти идеально круглую форму, почти, так как радиус закругления полукруглого бампера чуть-чуть больше радиуса задней половины корпуса. Края снизу скошены, что помогает роботу преодолевать препятствия.
 Переход прямым углом от верхней панели к боковой поверхности снижает вероятность того, что пылесос будет застревать под препятствиями с небольшим просветом. Сверху корпус прикрыт панелью из ламинированного пластика с ярким рисунком под прозрачным покрытием, относительно устойчивым к появлению царапин. У нас был вариант с раскраской «Lemon», еще на выбор предлагается «Magic» и строгий «Phantom». На верхней панели ближе к передней части корпуса находится контрольная панель с тремя емкостными сенсорными кнопками, подсвечиваемыми светодиодами значками режимов/состояния и, видимо, глазком ИК-приемника.
Переход прямым углом от верхней панели к боковой поверхности снижает вероятность того, что пылесос будет застревать под препятствиями с небольшим просветом. Сверху корпус прикрыт панелью из ламинированного пластика с ярким рисунком под прозрачным покрытием, относительно устойчивым к появлению царапин. У нас был вариант с раскраской «Lemon», еще на выбор предлагается «Magic» и строгий «Phantom». На верхней панели ближе к передней части корпуса находится контрольная панель с тремя емкостными сенсорными кнопками, подсвечиваемыми светодиодами значками режимов/состояния и, видимо, глазком ИК-приемника.
 Панель прикрывает пластина, выполненная, судя по идеальной гладкости и отсутствию царапин, из минерального стекла. Отметим, что индикаторы режимов больше похожи на кнопки, чем собственно кнопки, обозначенные белыми значками. Днище, боковые поверхности и бампер изготовлены из немаркого черного пластика с матовой поверхностью. Всю переднюю половину корпуса огибает подпружиненный бампер с небольшим ходом. Сверху в передней части бампера есть небольшой выступ. Этот выступ является самой высокой частью пылесоса и, соответственно, определяет минимальный просвет препятствия (например, дивана), под которое пылесос еще может забраться. Согласно нашим измерениям этот просвет равен 89 мм (приведем и полученное значение диаметра робота — 347 мм). Спереди на бампер наклеена узкая полоска из полиэтилена, на которой повреждения от столкновений с препятствиями практически нельзя обнаружить.
Панель прикрывает пластина, выполненная, судя по идеальной гладкости и отсутствию царапин, из минерального стекла. Отметим, что индикаторы режимов больше похожи на кнопки, чем собственно кнопки, обозначенные белыми значками. Днище, боковые поверхности и бампер изготовлены из немаркого черного пластика с матовой поверхностью. Всю переднюю половину корпуса огибает подпружиненный бампер с небольшим ходом. Сверху в передней части бампера есть небольшой выступ. Этот выступ является самой высокой частью пылесоса и, соответственно, определяет минимальный просвет препятствия (например, дивана), под которое пылесос еще может забраться. Согласно нашим измерениям этот просвет равен 89 мм (приведем и полученное значение диаметра робота — 347 мм). Спереди на бампер наклеена узкая полоска из полиэтилена, на которой повреждения от столкновений с препятствиями практически нельзя обнаружить.
 Пристыкованный сзади пылесборник продолжает окружность корпуса.
Пристыкованный сзади пылесборник продолжает окружность корпуса.
 На правой поверхности корпуса внизу и чуть сзади расположены разъем питания и клавиша выключения робота.
На правой поверхности корпуса внизу и чуть сзади расположены разъем питания и клавиша выключения робота.
 Перевернув пылесос вверх днищем, мы увидим две контактные площадки, передний опорный неповоротный ролик, боковую щетку, крышку отсека АКБ, два ведущих колеса на подпружиненных рычагах, отсек с основной щеткой и полупрозрачное дно пылесборника.
Перевернув пылесос вверх днищем, мы увидим две контактные площадки, передний опорный неповоротный ролик, боковую щетку, крышку отсека АКБ, два ведущих колеса на подпружиненных рычагах, отсек с основной щеткой и полупрозрачное дно пылесборника.
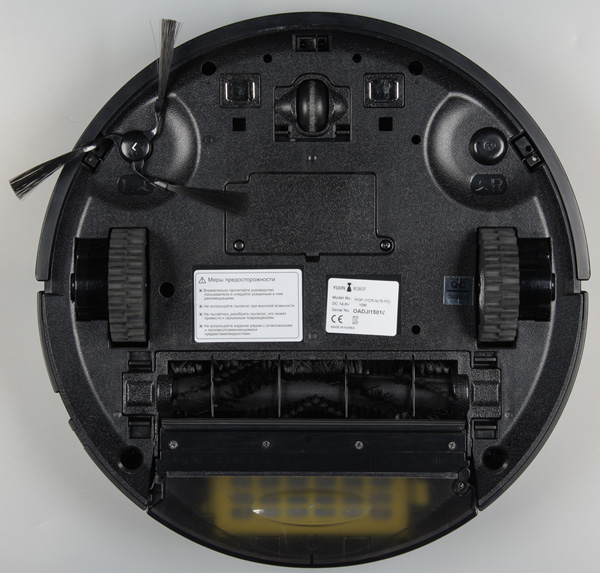 Робот-пылесос оборудован механическими датчиками столкновения, реагирующими на перемещение бампера, ИК-датчиками приближения к препятствию (расположены в углублениях на бампере), ИК-датчиками перепада высоты (три пары излучатель—приемник на днище в передней части близко к краю), благодаря которым пылесос не падает со ступенек, ИК-датчиками обнаружения базы (спереди на бампере), и датчиком отрыва от пола, по сигналу которого пылесос прекращает всякую механическую активность.
Робот-пылесос оборудован механическими датчиками столкновения, реагирующими на перемещение бампера, ИК-датчиками приближения к препятствию (расположены в углублениях на бампере), ИК-датчиками перепада высоты (три пары излучатель—приемник на днище в передней части близко к краю), благодаря которым пылесос не падает со ступенек, ИК-датчиками обнаружения базы (спереди на бампере), и датчиком отрыва от пола, по сигналу которого пылесос прекращает всякую механическую активность.
База, на которой пылесос подзаряжается, является своеобразной шкатулкой с секретами.
 Во-первых, под верхней крышкой закреплена щетка-гребенка, при помощи которой можно чистить пылесборник, основную щетку, датчики и т. д. А изнутри на верхнюю крышку наклеена табличка, разъясняющая коды ошибок.
Во-первых, под верхней крышкой закреплена щетка-гребенка, при помощи которой можно чистить пылесборник, основную щетку, датчики и т. д. А изнутри на верхнюю крышку наклеена табличка, разъясняющая коды ошибок.
 Во-вторых, задняя крышка базы прикрывает отсек, куда устанавливается внешний адаптер питания.
Во-вторых, задняя крышка базы прикрывает отсек, куда устанавливается внешний адаптер питания.
 Получается, что в собранном виде база представляет собой единую (и относительно тяжелую) конструкцию, но при необходимости адаптер можно извлечь, для замены или ремонта или, чтобы зарядить работа без использования базы, в случае ее выхода из строя. Основание базы большое по площади и снизу на него наклеены три резиновые площадки.
Получается, что в собранном виде база представляет собой единую (и относительно тяжелую) конструкцию, но при необходимости адаптер можно извлечь, для замены или ремонта или, чтобы зарядить работа без использования базы, в случае ее выхода из строя. Основание базы большое по площади и снизу на него наклеены три резиновые площадки.
 Сочетание указанных особенностей препятствует непредвиденному перемещению базы при маневрах пылесоса. Адаптер питания имеет широкий диапазон входного напряжения и по выходному напряжению (19 В) совпадает с типичными блоками питания для ноутбуков, поэтому вряд ли будет сложно найти замену в случае выхода из строя штатного БП. Длина кабеля питания от базы до вилки составляет 137 мм.
Сочетание указанных особенностей препятствует непредвиденному перемещению базы при маневрах пылесоса. Адаптер питания имеет широкий диапазон входного напряжения и по выходному напряжению (19 В) совпадает с типичными блоками питания для ноутбуков, поэтому вряд ли будет сложно найти замену в случае выхода из строя штатного БП. Длина кабеля питания от базы до вилки составляет 137 мм.
К пылесосу прилагается небольшой ИК-пульт ДУ.
 Его корпус изготовлен из черного пластика с матовой поверхностью. Кнопки на пульте относительно крупные, их обозначения читаются хорошо. Работает пульт от двух элементов ААА. Продается робот упакованным в не очень большую коробку с пластиковой ручкой.
Его корпус изготовлен из черного пластика с матовой поверхностью. Кнопки на пульте относительно крупные, их обозначения читаются хорошо. Работает пульт от двух элементов ААА. Продается робот упакованным в не очень большую коробку с пластиковой ручкой.
 Набор аксессуаров, входящих в комплект поставки, включает в себя запасные сменные фильтрующие элементы, протирочную насадку и к ней две салфетки из микрофибры.
Набор аксессуаров, входящих в комплект поставки, включает в себя запасные сменные фильтрующие элементы, протирочную насадку и к ней две салфетки из микрофибры.


Запасных щеток, к сожалению, нет. Локализация для использования в России выполнена на хорошем уровне — есть напечатанное руководство на русском языке, а наклейки на пылесосе и на базе выполнены на русском языке. На сайте «официального представителя iClebo от Yujin Robot в России» файла с руководством не было, но после нашего анонимного запроса в службу поддержки он там появился. Правда, лучше все же найти в Сети версию руководства на английском, так как в русском очень много неточностей.
Функционирование Оси ведущих колес расположены на одном диаметре окружности корпуса. Такая кинематическая схема позволяет роботу совершать разворот на месте без изменения границ, занимаемой роботом площади. Положительную роль также играют относительно небольшая высота и гладкий по периметру корпус. В итоге пылесос отличается хорошей маневренностью и способностью проникать в места с небольшим просветом по высоте. Указанная производителем скорость движения равна 300 мм/с. Ход шарниров в точке центров ведущих колес достигает примерно 30 мм, а диаметр колес равен примерно 70 мм, поэтому робот без особых проблем преодолевает встречающиеся препятствия небольшой глубины и высоты. Заявлено, что робот может преодолевать препятствия (пороги) высотой до 2 см (при выборе специального режима). Примерно столько и составляет расстояние от пола до нижней точки бампера пылесоса. Проверка подтвердила способность робота забираться на плиту толщиной 19 мм, положенную на ковролин с коротким ворсом. При ручном управлении, когда робот игнорирует датчики бампера, он смог забраться на препятствие высотой 24 мм.
При уборке передняя щеточка подгребает мусор к центру, затем основная щетка, работая в паре с неподвижным резиновым скребком, перебрасывает его в пылесборник. Тяжелые частицы мусора попадают в пылесборник по инерции, волокна и налипшие на щетку фрагменты мусора снимаются гребенкой на пылесборнике, а легкие частицы, подхваченные основной щеткой, потоком воздуха засасываются в пылесборник, где задерживаются двухслойным воздушным фильтром. Щетина на основной щетке расположена рядами с чередованием чуть более длинных и относительно мягких щетинок и жестких щетинок покороче. Видимо, так выше эффективность. Отметим конструкцию боковой щеточки — гибкие упругие поводки заканчиваются относительно жесткой прямой щетиной. В результате щеточка работает весьма эффективно и долго не теряет свою форму. Этот робот не является пылесосом в классическом смысле, так как непосредственно с очищаемой поверхности пыль не засасывается. Для дополнительной очистки гладких полов на днище за основной щеткой можно закрепить специальную планку, на которую на липучке прикрепляется махровая насадка из микрофибры (ее можно увлажнить), начисто протирающая поверхность.
 При установке этой планки нужно не забыть отключить режим повышенной проходимости (Climb), чтобы робот не зацепился насадкой за преодолеваемое препятствие. Препятствие определяется с помощью нижнего переднего ИК-датчика перепада высоты, с двумя порогами срабатывания — или слишком близкое препятствие, или слишком далекое (отрыв от пола/ступенька/очень черный пол). Два других датчика на днище сигнализируют только о втором событии.
При установке этой планки нужно не забыть отключить режим повышенной проходимости (Climb), чтобы робот не зацепился насадкой за преодолеваемое препятствие. Препятствие определяется с помощью нижнего переднего ИК-датчика перепада высоты, с двумя порогами срабатывания — или слишком близкое препятствие, или слишком далекое (отрыв от пола/ступенька/очень черный пол). Два других датчика на днище сигнализируют только о втором событии.
Днище пылесборника выполнено из слегка тонированного полупрозрачного пластика, но особой пользы это не приносит, так как взглянуть на него можно только или перевернув пылесос днищем вверх или вынув пылесборник.
 Очищать пылесборник очень просто и удобно: снимается верхняя крышка и пыль вытряхивается. Также можно откинуть скребок на шарнире и вытряхнуть пыль через открывшуюся щель, но смысла в этом нет, так как первый вариант гораздо удобнее, а фиксатор скребка лишний раз лучше не отгибать, чтобы в последствии скребок на открывался в самый неподходящий момент. При необходимости вынимается и очищается фильтр, прижатый желтой пластиковой решеткой.
Очищать пылесборник очень просто и удобно: снимается верхняя крышка и пыль вытряхивается. Также можно откинуть скребок на шарнире и вытряхнуть пыль через открывшуюся щель, но смысла в этом нет, так как первый вариант гораздо удобнее, а фиксатор скребка лишний раз лучше не отгибать, чтобы в последствии скребок на открывался в самый неподходящий момент. При необходимости вынимается и очищается фильтр, прижатый желтой пластиковой решеткой.
 Вентилятора в самом пылесборнике нет, поэтому пылесборник можно мыть под водой, главное потом его хорошо высушить. Воздух, установленным внутри пылесоса вентилятором, засасывается через щель на корпусе пылесборника (там, где она прилегает к корпусу пылесоса, имеется резиновое уплотнение) и выдувается куда-то внутрь. Отсоединять пылесборник относительно удобно и после некоторой тренировки это можно делать одной рукой, не сдвигая припаркованный на базе пылесос.
Вентилятора в самом пылесборнике нет, поэтому пылесборник можно мыть под водой, главное потом его хорошо высушить. Воздух, установленным внутри пылесоса вентилятором, засасывается через щель на корпусе пылесборника (там, где она прилегает к корпусу пылесоса, имеется резиновое уплотнение) и выдувается куда-то внутрь. Отсоединять пылесборник относительно удобно и после некоторой тренировки это можно делать одной рукой, не сдвигая припаркованный на базе пылесос.
 При обслуживании пылесоса боковая щетка просто с усилием снимается с оси, а основная щетка и передний ролик вынимаются после удаления пластиковых фиксаторов. Фиксатор основной щетки довольно хлипкий на вид и с тонкими ребрами-ограничителями, правда, пластик качественный, поэтому случайно эту деталь сломать сложно.
При обслуживании пылесоса боковая щетка просто с усилием снимается с оси, а основная щетка и передний ролик вынимаются после удаления пластиковых фиксаторов. Фиксатор основной щетки довольно хлипкий на вид и с тонкими ребрами-ограничителями, правда, пластик качественный, поэтому случайно эту деталь сломать сложно.
 Ось переднего ролика вращается в двух шариковых подшипниках. На одном торце основной щетки также установлен шариковый подшипник в гасящей вибрации резиновой вставке.
Ось переднего ролика вращается в двух шариковых подшипниках. На одном торце основной щетки также установлен шариковый подшипник в гасящей вибрации резиновой вставке.
В данном роботе установлена литий-ионная аккумуляторная батарея (видимо, составленная из 4 популярных элементов типоразмера 18650). Заменить батарею может сам пользователь, вооружившись только крестовой отверткой среднего размера.
 Предупредим, что этот пылесос недопустимо использовать во влажном помещении или на поверхностях с разлитыми жидкостями. После контакта пылесоса с жидкостями в лучшем случае придется долго очищать его от налипшего слоя пыли, в худшем случае пылесос может выйти из строя.
Предупредим, что этот пылесос недопустимо использовать во влажном помещении или на поверхностях с разлитыми жидкостями. После контакта пылесоса с жидкостями в лучшем случае придется долго очищать его от налипшего слоя пыли, в худшем случае пылесос может выйти из строя.
Эта модель имеет три основных режима уборки:
Автоматический с ограничением по времени, при этом робот движется по, в общем-то, произвольной траектории.
Максимальный — уборка всей доступной площади до тех пор, пока батарея почти не разрядится.
Локальный — интенсивная очистка определенного места. В это место пылесос или просто переносится, или направляется в режиме ручного управления.
Ручной — ручное управление движением с помощью пульта ДУ.
Модификатором режимов уборки является опция преодоления препятствий (Climb), при ее выборе робот будет пытаться преодолевать препятствия высотой до 20 мм, а если эта опция не активна, то высота преодолеваемых препятствий ограничена 5 мм.
О своем состоянии пылесос информирует с помощью светодиодного индикатора и звуковых сигналов. Отключить звуковое оповещение, к сожалению, нельзя.
Тестирование Ниже представлены результаты тестирования по нашей методике, подробно описанной в отдельной статье.
Режим Время уборки*, мм: сс % Первые 10 мин. 10:00 78,1 Вторые 10 мин. 10:00 89,3 (суммарный) Третьи 10 мин. 10:00 92,7 (суммарный) Max (до разряда АКБ) 112:04 96,5 Max (до разряда АКБ) 114:15 95,7 *От начала уборки до заезда на базу. Видео ниже снято с одной точки с полным охватом убираемой территории, база находится внизу по центру, при обработке часть видеоряда ускорена в десять раз, показаны только начало уборки и парковка на базу. Режим — до разряда АКБ:
На видео ниже в режиме слежения показаны несколько фрагментов: начало уборки, движение по произвольной траектории, обход вокруг препятствия, заезд в загончик.
Проведенные тесты показали, что траектория движения носит в основном хаотичный характер с «отскоком» от препятствия под различными углами, дополнительно периодически включается режим следования вдоль препятствия (правым боком, где боковая щеточка, или левым боком, где щеточки в этой версии робота нет), и очень редко робот начинает двигаться по разворачивающейся спирали. Иногда на пути движения робота оказывается зарядная база, которую он лишь слегка толкает, почти не смещая, и затем объезжает на минимальном расстоянии.
Робот не очень любит заезжать в узкий загончик (на 50 мм шире ширины робота), но все же периодически там оказывается и убирает в нем. Между высокими вертикальными и хорошо отражающими ИК-лучи стенками и корпусом робота обычно остается зазор порядка 2 см, тогда как к низким, наклонным (например, к плинтусу) или черным в ИК-свете стенкам робот подъезжает вплоть до срабатывания механического датчика в бампере. Итоговое качество уборки довольно высокое, совсем немного риса остается в самых углах, в «сложном» для робота загончике и чуть-чуть вдоль тех стенок, к которым робот не подъезжает вплотную:
В режиме до разряда батареи робот возвращается на базу с отключенным вентилятором и основной щеткой, чтобы оставшегося заряда с большей вероятностью хватило на дорогу домой. В случае режима с ограничением на время вентилятор и щетка работают вплоть до самой парковки на базе.
Тесты в «реальном» помещении показали, что робот достаточно уверенно перемещается по заставленным мебелью помещениям и возвращается на базу по окончании выбранного срока уборки. Основная щетка наматывает на себя довольно много волос и ниток, но не очень плотно, а большой диаметр валика с канавками позволяет очищать его просто пальцами без помощи инструментов.
В режиме локальной уборки (Spot) робот убирает по разворачивающейся и потом сворачивающейся спирали. Видео ниже это демонстрирует:
Уборка с ручным управлением включается только после запуска в автоматическом режиме при нажатии на кнопки направлений на пульте. Иначе робот перемещается, но не убирает. В ручном режиме робот двигается вперед при удерживании соответствующей кнопки, что не очень удобно (зато он точно не уедет за пределы действия пульта). Кнопка вправо — поворот робота на месте вправо, кнопка влево — поворот на месте влево. Кнопка назад — разворот на месте на 180 градусов. В режиме ручного управления робот, как было отмечено, игнорирует сигналы с датчиков бампера, поэтому в этом режиме роботом можно двигать по полу нетяжелые предметы и загонять его туда, куда он сам не забирается.
Во всех режимах уборки шумит робот одинаково, впрочем, удобнее было измерять в режиме локальной уборки, в котором робот дольше движется вблизи микрофона:
Режим Уровень шума, дБА Spot 55 Робот относительно тихий, впрочем, и вентилятор у него относительно слабый, поэтому основным вкладом является шум от редукторов ведущих колес и основной щетки.
При начале зарядки пылесоса на базе потребление от электросети равно 38–40 Вт. Если пылесос включен, заряжен и находится на базе, то от сети большую часть времени потребляется 0,6 Вт. Если пылесос убрать с базы (или выключить его кнопкой на боку), то потребление упадет до 0,4 Вт — столько потребляет сама база, включенная в сеть. Для полной зарядки роботу достаточно провести на базе от 54 до 1 ч. 21 мин.
Выводы Робот-пылесос iClebo Pop отличается высоким качеством изготовления и рядом рациональных конструктивных решений. К числу последних можно отнести боковую щеточку правильной конструкции — не просто с ворсом, но и с гибкими поводками; пылесборник с верхней крышкой, который можно мыть, так как вентилятор установлен внутри самого робота; простой фильтрующий элемент воздушного фильтра, который при необходимости можно изготовить из подходящего материала; устойчивую базовую станцию с щеточкой под крышкой. Если сравнить с более продвинутой моделью iClebo Arte, то можно прийти к выводу, что отсутствие навигации и второй боковой щеточки отрицательно сказывается на скорости уборки, но при увеличении времени уборки в ограниченном пространстве модель iClebo Pop справляется с задачей ничуть не хуже, если не лучше, так как большее влияние оказывают уже другие факторы — например, насколько близко робот подходит к препятствиям.
Достоинства: Удобный для очистки пылесборник Невысокий круглый корпус Боковая щетка Возможность установки насадки из микрофибры для протирки пола Устойчивая база оригинальной конструкции Невысокий уровень шума Есть пульт ДУ Недостатки: Значимых нет Робот-пылесос iClebo Pop предоставлен на тесты компанией ООО «Робототехника», являющейся официальным дистрибьютором продукции Yujin Robot в России
Полный текст статьи читайте на iXBT
