Квадрокоптер Simtoo Fairy Air Camera: верный повод сделать в комнате ремонт
Не так давно мы познакомились с миниатюрным, но умным квадрокоптером DJI Ryze Tello TLW004. Он показался нам совершенно безопасным: чуткое управление, широкая полетная функциональность, относительно неплохая устойчивость даже в неподходящих условиях. Но один серьезный минус может перевесить все конструктивные преимущества. Плохая камера. Которая, к тому же, записывает фото- и видеоматериал не в локальное хранилище, а на смартфон.
Сегодня у нас в руках еще один представитель класса некрупных летательных аппаратов со встроенной камерой — Simtoo Fairy Air Camera. Этот квадрокоптер тоже невелик размерами. Встроенная в него камера немного отличается конструкцией от камеры DJI Ryze Tello, поскольку позволяет изменять угол своего наклона. Электропривода у блока камеры нет, нужный угол выставляется заранее, перед взлетом. Характеристики видео здесь тоже посерьезнее — судя по всему, оптико-электронный блок взят не из слишком дальних складских хранилищ.
И все же нет в мире миниатюрных дронов совершенства. Хоть один факто, но обязательно погубит идею. В данном случае этот фактор — серьезная аварийная опасность, которую несет махонький с виду квадрик.
Конструкция, технические характеристики
Как, упаковка не мятая и почти не битая? Хвала службам доставки!

Снежно-белая очень прочная коробка из плотного картона содержит внутри пенопластовый каркас, благодаря которому дрон приедет целым и невредимым, даже если его доставлял лично Эйс Вентура.
Поставляется коптер вместе с «родным» пультом дистанционного управления. Точнее, контроллером. Этот контроллер традиционно для подобных устройств поддерживает подключение смартфона, на дисплей которого выводится живая трансляция с камеры коптера.

Аксессуаров, входящих в комплект, вполне хватит, чтобы взлететь сразу же после подзарядки аккумулятора:
- дрон со сложенными «лучами» и закрепленными на них винтами (правильнее — лопастями)
- две съемных защитных рамки из почти невесомого пластика
- аккумулятор с зарядной станцией и USB-кабелем
- пульт дистанционного управления дроном
- шестигранный ключ для установки лопастей и краткая инструкция на китайском и английском языках

Корпус квадрокоптера, ярко-красный сверху и черный снизу, изготовлен из пластика. Откидные лапки, на концах которых находятся двигатели, также пластиковые. О надежности сочленения лапок с корпусом говорить излишне — небольшие люфты совершенно некритичны для коптера с таким малым весом.

На задней части корпуса находится полупрозрачное окошко, под которым расположены датчики и светодиодный индикатор, сигнализирующий о состоянии дрона. Чуть выше имеется разъем Micro-USB для полевой подзарядки аккумулятора (но лучше пользоваться зарядным устройством, так как непосредственно в коптере аккумулятор заряжается в разы дольше). Спереди можно видеть камеру, в сложенном состоянии ее объектив направлен вперед строго по горизонтали. Отметим совсем невысокие ножки-опоры: благодаря им выступающие вниз части коптера не касаются ровной поверхности лишь чудом — до нее остается не более трех миллиметров. В случаях с тяжелыми конструкциями это означало бы необходимость взлета и посадки с идеально гладких поверхностей. Но в нашем легковесном случае роль посадочной площадки может играть даже примятая трава или утоптанный снег — без разницы.


На левом боку дрона находится слот карты памяти microSD, куда записывается видео и сохраняются фотоснимки.


Основная площадь нижней части дрона — это аккумулятор, который с силой вщелкивается в корпус летательного аппарата и не имеет никаких видимых креплений или фиксаторов. Отметим, что отсоединять его от дрона довольно страшно:, а вдруг отломаешь лапки…


Системы пассивного охлаждения в корпусе дрона не предусмотрено — никаких вентиляционных отверстий. Ближе к задней части корпуса можно видеть небольшую камеру, направленную вниз. Она требуется системе позиционирования (или автозависания, как угодно). Подробно об этой системе (точнее, про ее недостатки) мы рассказывали в упоминавшемся обзоре квадрокоптера Tello. Вкратце: эта система автоматического удерживания летательного аппарата на одном месте работает на том же принципе, который используется в обычной оптической мышке: камера, направленная вниз, беспрерывно фотографирует поверхность, а программа, обрабатывающая данные, сравнивает поступающие изображения и вычисляет направление перемещения. Это простейшая система, главное преимущество которой — ее низкая стоимость.

Камера — имеется в виду основная камера, дающая изображение — смонтирована в отдельном оптико-электронном блоке, который может изменять угол своего наклона на 80° от горизонтали. Вид этой камеры говорит о том, что серьезных претензий к качеству съемки предъявлять нельзя. Типичная «вебка», только с большим количеством пикселей на датчике.

Энергию моторам и электронике дрона дает съемный аккумулятор емкостью 970 мА·ч. Его энергии хватает на 16 минут полета. Но это «по паспорту». На практике, конечно же, получается меньше из-за неодинакового расхода энергии во время активных полетов, а также вследствие низких температур, при которых проводилось тестирование. Этот аккумулятор можно заряжать непосредственно в дроне (это очень долго), либо — особенно, если есть запасные аккумуляторы — пользоваться для зарядки комплектным адаптером.

Пропеллеры закрепляются на осях моторов с помощью маленького комплектного ключа. Конструкция лопастей довольно оригинальна: будучи закрепленными, они все равно свободно «болтаются» по горизонтали. Выпрямляются они самостоятельно после раскрутки моторов.
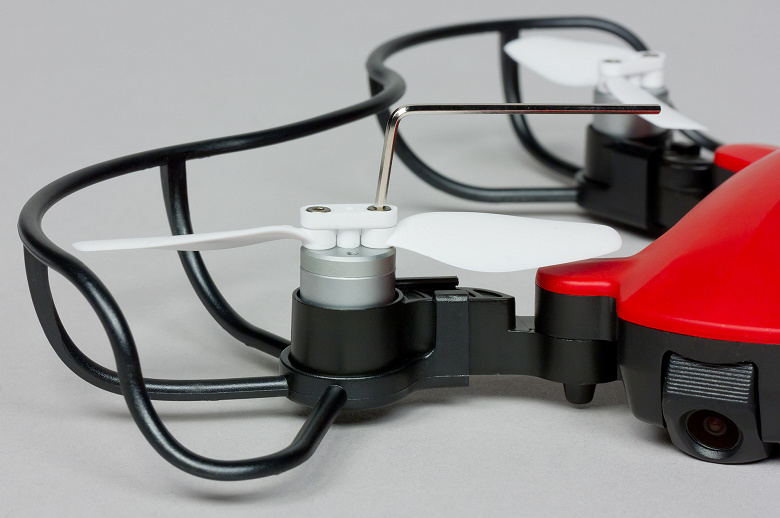
Казалось бы, это плюс, ведь в случае столкновения с чем-либо лопасть не нанесет препятствию порез, не расколется сама, а просто отклонится. Как бы не так! На практике, после нескольких посеченных пальцев, выяснилось, что лопасти выполнены из прочного пластика, а крутятся они с такой высокой скоростью, что, сунь в лопасть железный прут, лопасть просто расколется, но не отклонится.
Следующая конструктивная особенность привода дрона заключается в том, что защитные рамки кое-как защищают от бешеных лопастей лишь снизу и с боков. Но не сверху. Вращающиеся лопасти и их крепления (пластинки с винтами) крайне опасны, они могут поранить и даже просверлить дырки в потолке. Именно это и произошло при попытке взлететь в помещении. Об этом мы расскажем — и покажем — позже.
Прилагаемый пульт управления поддерживает установку смартфонов с шириной корпуса до 85 мм. Никакой связи смартфона с пультом не предусмотрено. На пульте наблюдается минимум органов управления. Но их вполне достаточно — все остальное имеется в интерфейсе управляющего мобильного приложения.

Пульт снабжен встроенной батареей, подзарядка которой осуществляется через порт Micro-USB, встроенный в переднюю часть устройства.
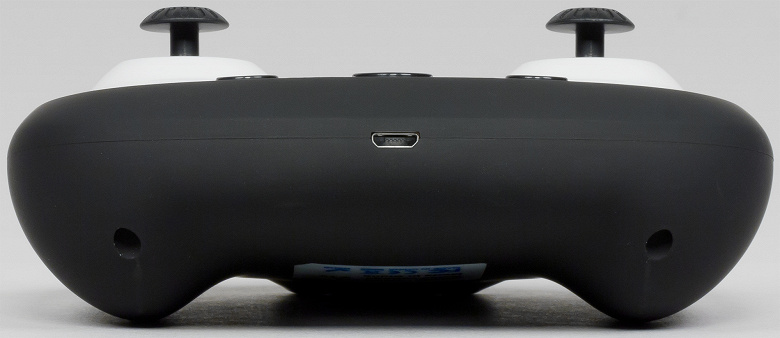
Ход джойстиков можно описать как плавный, ровный, при этом очень четкий, без хлюпаний и щелчков. Это даже удивительно, если учесть игрушечный дизайн контроллера.

Основные технические характеристики квадрокоптера и его пульта приведены в следующей таблице.
| Квадрокоптер Simtoo Fairy Air Camera | |
|---|---|
| Количество двигателей | 4 |
| Связь с мобильным устройством | Wi-Fi 802.11n 5 ГГц |
| Датчики | визуально-ультразвуковая система позиционирования, GPS, Глонасс (см. в тексте статьи) |
| Интерфейсы | Micro-USB для зарядки батареи |
| Питание | сменная аккумуляторная батарея 970 мА·ч/7.6 В |
| Дальность связи с пультом ДУ | 150 м |
| Максимальная высота полета | 15 м |
| Максимальная скорость | 11,1 м/с (40,0 км/ч) |
| Максимальное время полета | 16 минут |
| Управление | с помощью мобильного устройства, приложение Fairy (версия для Android) |
| Размеры, вес | 128×66×33 мм (сложенное состояние); 143×130×33 мм (рабочее состояние), 140 г с батареей |
| Функции | автоматический взлет/посадка, живая трансляция видео на смартфон, обучающие материалы |
| Камера | |
| Тип | встроенная в корпус дрона, с изменяемым углом наклона |
| Оптико-электронная система | CMOS 8 Мп |
| Угол обзора | 115° по диагонали |
| Видеосъемка | MP4 (H.264), до 1920×1080 30p, без звука |
| Фотосъемка | JPG, 5 Мп (2592×1936) |
| Стабилизатор | нет |
| Локальный носитель информации | карта памяти microSDHC |
| Пульт ДУ, модель YK-XT175 | |
| Тип контроллера | беспроводной геймпад для управления мультикоптером |
| Органы управления | 2 мини-джойстика, 3 кнопки, колесико подстройки, переключатель питания |
| Связь с дроном | устанавливается автоматически, Wi-Fi 802.11n 2,4 ГГц, мощность передатчика 3 дБм |
| Питание | встроенный аккумулятор 470 мА·ч |
| Рабочий температурный диапазон | от 0 до +40 °C |
| Максимальная ширина корпуса подсоединяемого смартфона | 85 мм |
| Размеры (Ш×В×Г), вес | 130×50×102 мм, 145 г |
Подключение, настройка
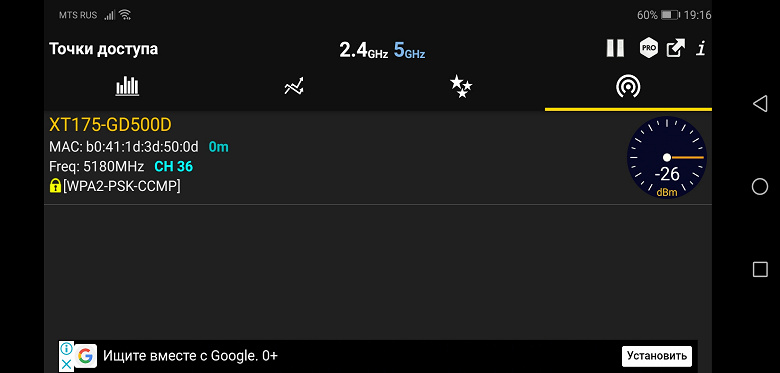
Прежде всего требуется установить на мобильное устройство приложение Fairy, после чего включить дрон долгим нажатием единственной кнопки на корпусе. Коптер после включения создает Wi-Fi точку с именем XT175-GD500D. Эта точка работает на частоте, как оказалось, 5 ГГц со следующими характеристиками:
После того, как смартфон подключился к этой точке, нужно запустить мобильное приложение и либо сразу перейти к полетам, управляя дроном виртуальными кнопками на экране смартфона, либо все же вспомнить наше предостережение и сначала все-таки подключить пульт. Тем более, что никаких умственных усилий для этого не требуется: достаточно передвинуть переключатель питания на корпусе пульта в положение On. Через несколько секунд контроллер самостоятельно установит связь с включенным коптером по отдельному каналу, после чего они будут общаться между собой на понятной им волне, никак не взаимодействуя со смартфоном.
При первом запуске мобильного приложения перечисляются пункты того, что делать нельзя. Здесь можно видеть предостережения, касающиеся особенностей полетов в помещении. Ну да, ну да… Речь, насколько можно понять, идет о некоем ультразвуковом датчике, с помощью которого (совместно с видеопозиционированием) дрон «понимает», где он находится, и должен ощущать препятствия. Ну, если уж не ощущать, то хотя бы не влетать на полном ходу в потолок и толкать его вверх, пытаясь пробиться к соседям.
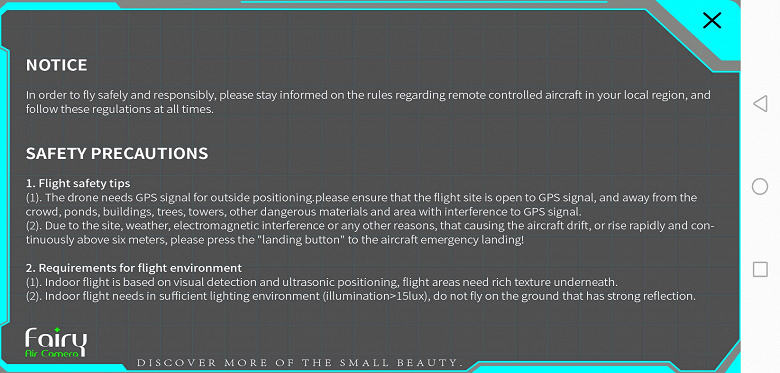
Также в тексте упоминается минимальная освещенность в люксах, необходимая для работы оптической системы устойчивости. Постойте-постойте, 15 люкс минимум? Но в комнате, где дрон, как пьяный, мотается из стороны в сторону и регулярно стучится к соседям в потолок, освещенность на уровне пола составляла более ста люксов, при этом рисунок коврового покрытия достаточно контрастный, чтобы оптическая система могла определить перемещение. Так нам кажется. Но не дрону.

В общем, с системой позиционирования у коптера явно что-то не то. По крайней мере, в помещении. Ну, или так: в имеющемся у нас помещении. Хотя, в других помещениях мы летать больше и не пытались — причину объяснять, наверное, не нужно.
Впрочем, достаточно пока злословий, перейдем к настройкам дрона. Точнее, настройкам приложения, которое управляет коптером и может изменить его характеристики. Во время запуска приложение спрашивает пользователя, с помощью какого устройства он желает управлять полетом дрона: посредством смартфона или же контроллера.
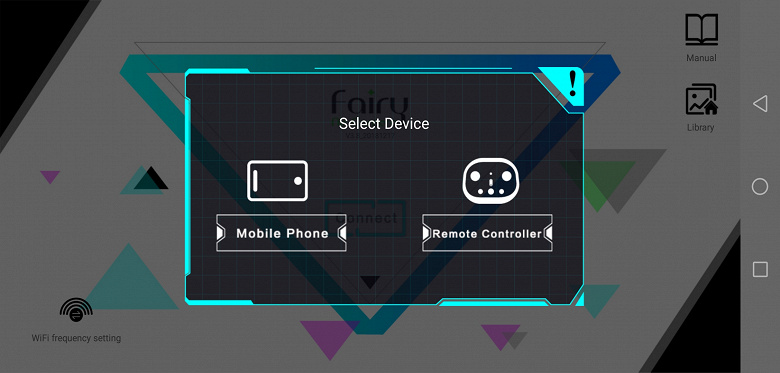
В зависимости от сделанного выбора главное окно программы будет содержать разные инструменты. Если управлять дроном планируется только с помощью смартфона, то поверх видеокартинки станут отображаться необходимые для этого инструменты. Если выбран «правильный» способ управления, механический контроллер, то эти инструменты будут отсутствовать.
 Управление смартфоном
Управление смартфоном  Управление контроллером
Управление контроллеромРазличия найти нетрудно — вот они, эти кнопки в нижней части экрана: смена способа управления, автовзлет и автопосадка. Кстати, о способах управления. Оказалось, что при управлении со смартфона коптером можно командовать тремя методами:
 Виртуальный джойстик
Виртуальный джойстик 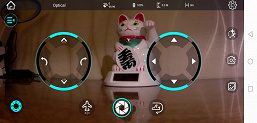 Виртуальные кнопки
Виртуальные кнопки 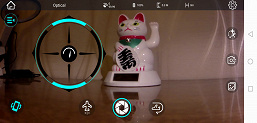 Наклон/поворот смартфона
Наклон/поворот смартфонаПервые два способа, по идее, вполне работоспособны. Но, повторяем, лучше ими не пользоваться. Такое управление виртуальными кнопками оказывается гораздо менее предсказуемо, чем управление контроллером с настоящими механическими кнопками. Скорее всего, дело в радиочастоте. Она, как мы уже выяснили, разная для смартфона и пульта.
Ну, а этот третий способ управления, с помощью наклона и поворота смартфона, совсем не внушает доверия. Во-первых, для такого управления требуется недешевый смартфон с очень точным гиродатчиком. А во-вторых, даже представить жутко, что случится с дроном, если владелец смартфона споткнется или поскользнется. На морозной улице такое запросто может произойти. И что же, дрон повторит все движения катящегося кубарем пилота и его смартфона? Интересно бы посмотреть на такой пердимонокль. Но только со стороны, не в качестве участника.
Помимо кнопок, показанных на скриншотах, главный экран может содержать несколько дополнительных объектов, которые появятся только после отрыва от земли или при доступности спутников. То есть, на улице или же непосредственно в полете (по крайней мере, в теории и согласно инструкции). Но взлетать нам еще рано, мы даже в настройках не успели покопаться. Заглянем в них, много времени это не займет — они чрезвычайно скудные, состоят всего лишь из четырех вкладок:
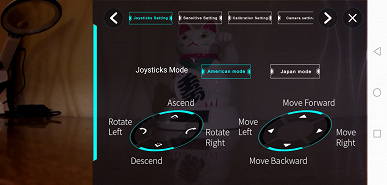 Переключение джойстика
Переключение джойстикас «американского» стиля на «японский»
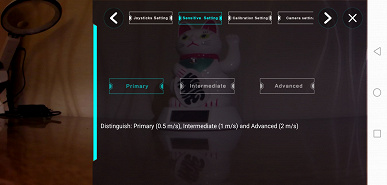 Смена режимов от «новичка» до «продвинутого»
Смена режимов от «новичка» до «продвинутого» 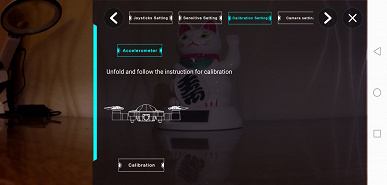 Калибровка акселерометра
Калибровка акселерометра 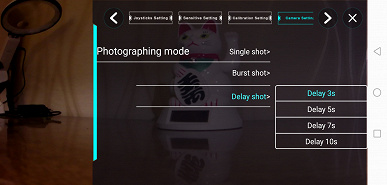 Выбор фоторежима
Выбор фоторежимаВот и все. Негусто. Зато понятно. Кроме разве что первого пункта, в котором раскладка джойстика меняется с «американской» на «японскую». Оказывается, эта смена всего лишь переносит команды Вверх и Вниз с левого джойстика на правый. Соответственно, при этом с правого джойстика на левый перемещаются команды Вперед и Назад. Вот уж, действительно, «японская логика».
Кстати, никто не заметил настроек видеосъемки? Нет? И правильно. Потому, что их нет. Вообще. Камера всегда снимает в одном режиме, 1080p30, записывая видео со следующими характеристиками: AVC (H.264), 1920×1080, 30 к/с, максимальный битрейт 14 Мбит/с. Звуковой дорожки в видеофайлах традиционно не имеется. Кстати, почему почти в камерах почти всех квадрокоптеров отсутствуют микрофоны? Неужели разработчики коптеров полагают, что этот «ж-ж-ж» от работающих винтов не нужно записывать? Они крепко ошибаются. Достаточно установить пусть простенький, но направленный вниз микрофон.
Чтобы составить полное впечатление от ПО дрона, осталось изучить кнопки, которые остаются невидимыми, пока не взлетишь или хотя бы не окажешься на улице. Там, где (по идее) доступны Глонасс и GPS. Но взлет — это уже эксплуатация.
Эксплуатация
Особенности
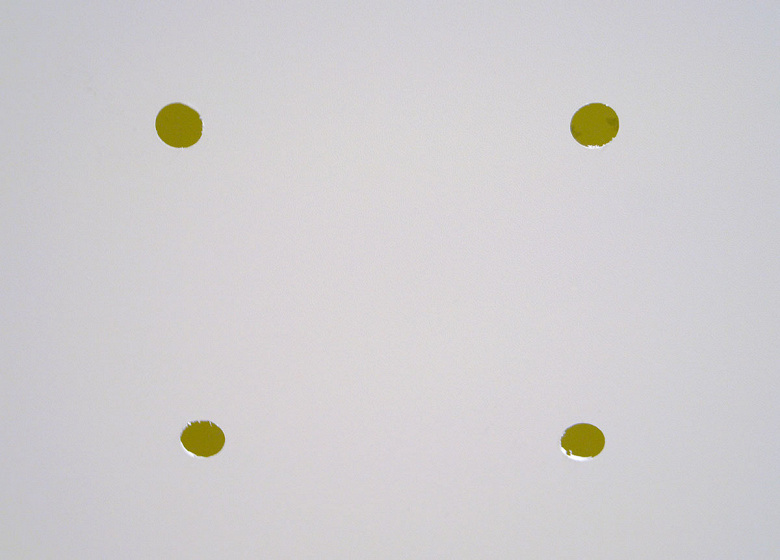 Аккуратно просверленные дырочки в натяжном потолке — последствия неуправляемого набора высоты
Аккуратно просверленные дырочки в натяжном потолке — последствия неуправляемого набора высотыНу, а что дырочки… Зато теперь есть повод расцветить скучный белый потолок красивыми аппликациями. Заодно мы выяснили, что осуществлять полеты и даже просто включать этот дрон в помещениях строго не рекомендуется. Что бы вам ни говорили в руководстве или других источниках (кстати, «есть мнение», что в этих других источниках информация о дроне попросту взята с официального сайта производителя, а не получена в ходе реальной эксплуатации).
Несмотря на наличие (как заявляется) чутких датчиков и оптической системы автозависания, этот дрон отличается редкостной слепоглухотой в помещении (позже выяснилось, что и на улице он ведет себя ничем не лучше). После взлета дрон не зависает в неподвижности, а склонен либо болтаться из стороны в сторону, как летучая мышь, объевшаяся подгулявших фруктов, либо (если пилот не совершает никаких действий с пультом ДУ) пускается в неконтролируемый дрейф. И это, повторим, несмотря на имеющуюся оптическую и ультразвуковую систему определения положения. Такое ощущение, что эти датчики попросту не работают! Как, кстати, не работает и система GPS-позиционирования, что выяснится чуть позже.
Более того, дрон склонен неконтролируемо набирать высоту после команды «Взлет», если она подана с виртуального пульта управления в мобильном приложении. Что интересно — при управлении дроном с помощью физического контроллера (пульта) такого не происходит. Еще интересней: даже упершись в потолок или стену, дрон продолжит «взлёт» или «полет». Отсюда еще один вывод:, а ну его подальше, это виртуальное управление с помощью мобильного устройства. «Железные» кнопки — они понадежней будут. Тем более, что пульт ДУ и дрон общаются между собой по своему отдельному каналу, а не через смартфонный вайфай.
От нашей давней привычки фотографировать каждый исследуемый гаджет тепловизором на сей раз пришлось отказаться. Это объясняется тем, что теплоснимки работающих электронных устройств разумно делать при комнатной температуре. Которая считается средней, комфортной и «умолчальной» для людей и электроники. Но вспомним бешеный норов и непредсказуемость рассматриваемого дрона. Как его оставишь зависшим хотя бы на минуту? Что уж говорить про положенные пять минут работа двигателей с непрерывной видеосъемкой для доведения электроники до нужной тепловой «кондиции». Нет уж. Если этот дрон оставить взлетевшим в комнате — он за минуту перемелет в труху всю вашу обстановку.
Ну, а фотографировать тепловизором на улице в многоградусный минус — это, во-первых, несерьезно и нечестно. Очевидно ведь, что дрон не сумеет заметно нагреться и тем более перегреться при полете в морозном воздухе. А во-вторых, невозможно «попасть» тепловизором в непрерывно болтающийся коптер, который банально не умеет «висеть» на одном месте, неподвижно.
Эта особенность дрона, которая может явиться — и многократно являлась! — причиной аварии, описывалась нами уже неоднократно. Проблема кроется в оптической системе удержания на месте и ультразвуковых датчиках. В условиях, когда дрону недоступны спутники, дрон, по уверениям разработчика, ориентируется на показания оптического и ультразвукового датчиков. Мы уточним: не ориентируется, а должен ориентироваться. При полете в условиях, соответствующих требованиям, дрон сразу после взлета начинает медленный дрейф в одном ему известном направлении, пока не упрется в препятствие. Например, в стену. Но и воткнувшись в нее, он не отлетает от стены, не падает и не идет на посадку. Он упорно продолжает толкать стену своими рожками. Ой, рамками. Хотя…
И будет он так упираться в преграду до тех пор, пока наконец-то не перевернется. Упав, дрон все-таки затихает и выключает моторы. Крайне своеобразный характер. Конечно, в моменты блужданий по комнате он достаточно адекватно поддается ручному управлению, однако в небольшом помещении командовать резвым коптером очень непросто. Его постоянно болтает, кидает в разные стороны поток воздуха, отражающийся от стен и пола. Это — еще один довод против полета в помещениях.
Как указывается в спецификациях коптера, полностью заряженной батареи ему хватает на 16 минут полета в зависимости от активности. На морозе это время может сократиться в разы, если батарея успела охладиться до взлета. Поэтому аккумулятор следует всегда держать в тепле, доставая лишь в самый последний момент, перед самым взлетом.
Звук, издаваемый коптером во время полета — довольно резкий, даже режущий. Это объясняется малым диаметром его винтов (точнее, малой длиной лопастей) и, соответственно, увеличенной скоростью их вращения. Наверное, будь скорость вращения еще чуть выше, лопасти перейдут на сверхзвук.
Об указанном в характеристиках дрона расстоянии, на котором он слушается команд пульта, трудно судить точно. Мы не стали узнавать возможный максимум из-за элементарной опаски потерять дрон в снежных заносах, и позволяли отлетать ему от оператора не более чем на 50 метров. Зато расстояние, на котором видеосигнал с дрона уверенно приходит на смартфон, все-таки проверили: получилось около 50 метров в условиях прямой видимости. Но стоило увеличить это расстояние на пять-десять метров, как трансляция начинала прерываться, видеокартинка замирала. Если подумать, то еще большего расстояния и не требуется: коптер позиционируется как летающий автоселфщик, а не в качестве исследователя непролазных чащоб, куда нельзя дойти ногами.
Максимальная высота, на которую может подняться коптер, составляет 15 метров. Довольно неплохой результат для почти игрушки. Почему нельзя выше? Очень просто: дрон «потеряет» землю. Точнее, потеряют его датчики, оптический и ультразвуковой, с помощью которых он определяет свое положение (снова уточним: должен определять). GPS приемник, встроенный в дрон, тут не поможет.
Режимы полета
Кстати, о GPS-приемнике. За время тестирования дрона эта функция никак о себе не напомнила. Ни разу. Впрочем, мы уже и не удивляемся такому положению, не впервой. Ведь оптико-ультразвуковая система удержания коптера на месте тоже скорее не работает, чем работает. В итоге не удалось проверить в деле одно из редких и полезных умений коптера. Эта функция называется Follow Me и позиционируется как наиболее «вкусная» среди возможностей дрона. Якобы, активировав режим «Следуй за мной», пользователь может спокойно передвигаться, в то время как дрон должен послушно лететь вслед, попутно ведя съемку.
Как бы не так. Даже на открытой со всех сторон площадке, где спутников хоть отбавляй, коптер при попытке активировать эту функцию отвечает отказом, причем мотивированным довольно странно.
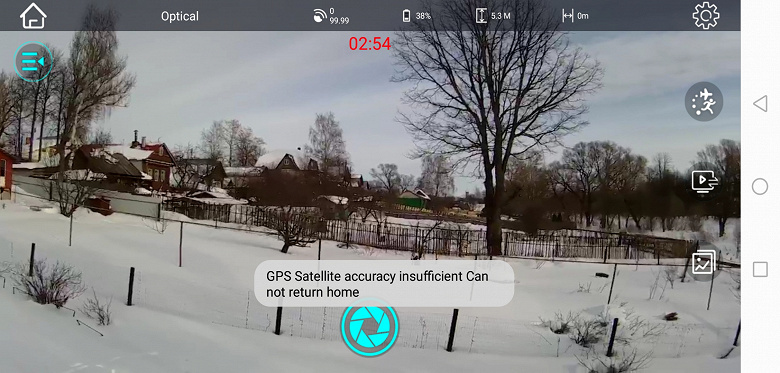
Ну, с GPS все понятно — недостаточная точность, бывает. Но причем тут какое-то возвращение домой? Команда была не вернуться домой, а следовать за хозяином (в интерфейсе приложения это правая верхняя иконка с изображением бегущего человечка и преследующего его самолетика). Уточним: мы использовали несколько разных смартфонов, в которых было включено геопозиционирование. Увы, не помогло.
Как вариант: дрону требуется больше времени, чтобы отыскать спутники. Но увы — запас батареи коптера не бесконечен, после 10 минут работы ему пора на подзарядку. А скриншот, приведенный выше, сделан после 10 минут полетов и простоя на снегу, что можно видеть по оставшемуся заряду батареи. Что, за 10 минут активности электроника не смогла увидеть ни одного спутника? Слабо верится. Похоже, что GPS приемник в коптере если и имеется, то попросту не работает.
Кстати, для того, чтобы сделать этот скриншот, пришлось задействовать обе руки. А значит, перестать управлять дроном. Что из этого следует, мы уже знаем — дрон в который раз упал.
Прочих режимов полета в дроне нет. По крайней мере, нам их не удалось отыскать. Скорее всего, по той причине, что коптер не в состоянии определить спутники. Соответственно, и функции, завязанные на GPS-приемник, не активировались.
Соберем воедино все сведения об особенностях дрона, полученные в ходе его эксплуатации. Только теперь добавим видео с нашим разрушительным героем в главной роли.
Итак, взлет коптера осуществляется нажатием соответствующей иконки на дисплее смартфона либо с помощью отдельной кнопки на пульте ДУ. Далее начинаются тонкости. Если оператор коптера не предпримет никаких действий, оставив дрон висеть в воздухе на одном месте (точнее, болтающимся на одном месте), то с высокой долей вероятности через три-пять секунд аппарат резво отправится в случайном направлении, снижая высоту полета. При этом ни на какие команды с пульта или смартфона дрон не реагирует. Воткнувшись в препятствие, он продолжит упираться, пока не упадет. Если препятствия на его неведомом пути не окажется, то коптер просто воткнется в землю и выключится. Ну, или, как в нашем случае, в снег. Все описанное хорошо продемонстрировано в следующем ролике.
Таким образом, при полетах на улице (а в помещениях мы уже договорились не летать) от оператора требуется немедленно после взлета брать управление на себя, заставляя дрон непрестанно двигаться. Влево-вправо-вверх-вниз, без разницы. Важно, чтобы коптер постоянно получал какие-то команды и изменял направление движения. Иначе, чаще всего — ступор, отказ слушаться, неконтролируемый дрейф со снижением и, как следствие, авария. Между прочим, будь вместо снега трава, эта статья не состоялась бы вовсе, поскольку жесткая растительность непременно расколет крутящиеся пропеллеры на кусочки. Это случилось бы непременно, при первом же взлете. А снег — это безопасно.
Беспрестанное вмешательство в движение дрона означает нестабильную видеосъемку. Постоянное дерганье камеры используется в некоторых художественных фильмах для усиления эффекта присутствия, но дольше минуты смотреть такую болтанку невозможно. Вот и оператору коптера надоела трясущаяся картинка, через полминуты полета он отпустил оба стика на пульте ДУ, понадеявшись на то, что дрон спокойно зависнет на месте. Но дрон, как обычно, тут же пошел в сторону со снижением, чуть не поранив второго оператора с камерой, и опять воткнулся в снег. Это еще раз доказывает нашу «находку»: коптер слеп и глух, он не видит и не ощущает никаких препятствий на своем пути.
«Освоив» взлет и управление, пора вспомнить о посадке. В следующем ролике оператор принудительно заставил дрон прекратить полет. Нажатие кнопки на пульте ДУ — и коптер начинает снижение. Однако и здесь дрон удивил. Вместо того, чтобы спокойно приземлиться, аппарат начал скользить над снежной поверхностью, пока… Правильно, пока снова не воткнулся!
Можно предположить, что тут виноват снег. Ничуть. Ровно так же дрон «садился» и в помещении. Жаль, что не удалось снять это его поведение со стороны.
За все полеты не было отмечено ни одного случая, когда дрону удавалось бы самостоятельно зависнуть в одном положении. Таким образом, сделать селфи с помощью данного аппарата решительно невозможно. А ведь камера его не так уж и плоха, если сравнивать с упоминавшимся дроном-малюткой DJI Tello. Правда, снимать в полете, как мы выяснили, практически бесполезно: непрестанная болтанка уничтожает всю полезность воздушного кино.
Камера
Судя по всему, в этой камере используется датчик и процессор, не отличающиеся повышенным энергопотреблением. Скромная электроника, дающая столь же скромный результат. В этом мы еще убедимся.
Дать команду на запись или создание фотографии можно только с дисплея смартфона, поскольку на контроллере для этого не предусмотрено кнопок.
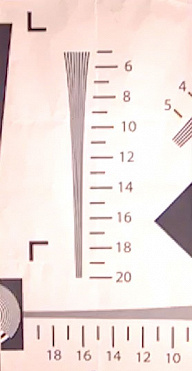
Разрешающая способность камеры в видеорежиме напоминает таковую в дешевых любительских Full HD видеокамерах первых поколений, едва достигая 700 ТВ-линий по горизонтальной стороне кадра. Детализация, конечно, не ахти высокая, но такой микрокамерке с недорогой оптикой это простительно.
Кстати, этот оранжево-непонятный цвет стоп-кадра — не ошибка оператора. Ручных настроек изображения в мобильном приложении не имеется, а автоматика камеры чрезвычайно неумело определяет цветовую температуру сцены в помещении, допуская ошибку баланса белого. Но мы уже говорили, что в помещении применять дрон категорически не рекомендуется. Хотя, после продырявленного потолка, мы больше и не применяли.
Роллинг-шаттер в видео заметен невооруженным глазом — в камере используется довольно «несвежий» сенсор с невысокой скоростью построчного считывания. Ни о какой стабилизации, конечно, нет и речи. Да о ней никто и не говорит, даже производитель. Хотя, при такой болтанке, которую создает дрон во время полета, не поможет никакая стабилизация, кроме дорогого гироскопического подвеса.
Встроенная в корпус камера имеет одну степень свободы, ее можно наклонить на 80° вниз. Правда, только вручную. И делается это, само собой, перед взлетом при выключенном коптере. Вообще, приближаться к работающему дрону, пусть его лопасти и прикрыты защитными рамками, не нужно. И тем более касаться его руками. Глубокие порезы пальцев заживают неделю-две.
Отметим значительную разницу в качестве между видео и фото: ее можно оценить с помощью этих стоп-кадров и снимков:
Почему такая разница? Видеокадр кажется размытым, с низкой детализацией и нечеткими контурами. В отличие от него, фотография, сделанная ровно в тех же условиях, по качеству не уступает фотоснимкам, которые сняты неплохим смартфоном.
Ответ: слабый процессор. Он не в состоянии обработать полный видеокадр с той частотой, которая требуется для видеозаписи с разрешением Full HD. Но даже и при таком размере кадра с невысокой частотой, детализация получается низкой из-за явного пропуска строк при снятии информации с датчика.
Чувствительность камеры можно рассматривать как средненькую, типичную для любой микрооптики. Одно хорошо: при недостатке света автоматика камеры не включает супер-усиление, от которого все равно нет никакого толка, кроме цифрового шума.
Эти кадры сняты, конечно, не в полете, а при неработающих моторах, с руки. Ночью летать нельзя, дрон тут же потеряется.
Выводы
Попробуем отыскать положительные качества рассмотренного коптера:
- неплохая автономность
- быстрая подзарядка сменного аккумулятора с помощью прилагаемой зарядной площадки
- камера с изменяемым углом наклона
Увы, все перечисленные плюсы намертво перечеркиваются единственным и главным недостатком аппарата: небезопасность, неустойчивость и непредсказуемость при полетах в помещении и вне помещений.
Странно, что в комплекте с этим коптером не имеется запаса бактерицидных лейкопластырей. А заодно и материалов для быстрого ремонта натяжных потолков или посеченных обоев. С такими умениями дрона перечисленные дополнения просто необходимы. Конечно, нельзя исключить, что нам попался никудышный тестовый экземпляр с нераспаянными или заведомо неработающими электронными компонентами. С другой стороны, при нынешних принципах производства гаджетов такие казусы почти невероятны.
Полный текст статьи читайте на iXBT
