Квадрокоптер DJI Mavic Air: складной летающий цифрокомпакт
Кто из фотографов хотя бы раз не мечтал снимать что-либо с воздуха! Ведь на свете так много мест, которые при взгляде с высоты человеческого роста выглядят довольно скучно и невыразительно, но совершенно преображаются, если смотреть на них с высоты птичьего полета. Поэтому летающим камерам успех был гарантирован a priori, и убеждать специалистов в целесообразности создания таких устройств не было необходимости.
Иное дело — воплощение идеи. На этом пути перед разработчиками последовательно вставали разные препятствия, начиная от чисто технологических и кончая психологическими. Поэтому ждать появления по-настоящему удачных беспилотных летательных аппаратов (БПЛА), оснащенных фото- и видеокамерами, пришлось достаточно долго. Однако за последние пару лет специалистам удалось решить большинство возникавших проблем, и нынче летающие камеры получают все более широкое распространение.
Сегодня наиболее успешным производителем БПЛА с камерами следует, пожалуй, признать китайскую компанию DJI, аппараты которой стали de facto стандартом в сфере потребительских дронов. Испытаниям интересного представителя ее семейства летающих камер и посвящается этот материал.

| Наименование | DJI Mavic Air |
|---|---|
| Дата анонса | 23 января 2018 г. |
| Тип | компактный складной БПЛА с камерой, снабженной механическим стабилизатором изображения |
| Производитель | DJI |
| Информация о дроне | DJI Mavic Air на сайте производителя |
| Средняя цена в России (стандартная минимальная комплектация с одной батареей) | |
| Розничные предложения |

Начнем с краткого описания самых важных особенностей DJI Mavic Air.
Главное
- легкий и компактный БПЛА, удобный для путешествий
- длительность полета — 21 минута от одной полностью заряженной батареи
- максимальная скорость — 68,4 км/ч
- максимальное удаление от точки взлета — до 4 км
- поддержка спутниковой навигации GPS и Глонасс
- может взлетать с руки и садиться на руку
- управление полетом с помощью пульта ДУ, смартфона или посредством жестов (SmartCapture)
- датчики визуального позиционирования предотвращают столкновения с препятствиями и обеспечивают возможность их облета
- улучшенная система автоматического пилотирования (APAS)
- система «возвращения домой» по команде пилота и автоматическая (при критическом снижении заряда батареи или утрате связи с пультом управления)
- наличие автоматических режимов фото- и видеосъемки
- камера с сенсором CMOS типоразмера ½,3″ с разрешением 12 Мп, фиксированным фокусным расстоянием 24 мм (в эквиваленте) и фиксированным раскрытием диафрагмы f/2,8
- автоматическая съемка и создание панорам размером до 33 Мп
- возможность съемки в режиме HDR, съемка серией, автоматический экспобрэкетинг, интервальная съемка (таймлапс)
- изображения во всех режимах фотографирования можно сохранять в JPEG и DNG (RAW)
- съемка видео в Ultra HD 4K 3840×2160 при 30 кадрах/с и Full HD 1920×1080 при 120 кадрах/с с битрейтом до 100 Мбит/с
- трехосевая стабилизация камеры (стедикам), активная при съемке фото и видео
- встроенное хранилище отснятого материала емкостью 8 ГБ
- поддержка карт памяти microSD до 128 ГБ
За деталями конструкции следует обратиться к спецификациям, которые, будучи сваленными в общую кучу, не помогают, а, скорее, мешают разобраться с аппаратом. Приходится иметь дело и с БПЛА, и с камерой, и с пультом управления, не говоря уже о программном обеспечении и особенностях источников питания. Дабы ввести хотя бы видимость порядка, я группировал технические данные так, как это принято у изготовителя.
Технические характеристики
Во всех таблицах приведены данные производителя.
Летательный аппарат
| Максимальная скорость полета (на уровне моря в штиль) |
режим S: 68,4 км/ч (19 м/с); режимы P и Wi-Fi: 28,8 км/ч (8 м/с) |
|---|---|
| Максимальная высота полета (над уровнем моря) |
5000 м |
| Максимальная скорость набора высоты |
режим S: 4 м/с; режимы P и Wi-Fi: 2 м/с |
| Максимальная скорость вертикального снижения | режим S: 3 м/с; режим P: 1,5 м/с; режим Wi-Fi: 1 м/с |
| Максимальная длительность полета (в штиль) |
21 минута при скорости 25 км/ч |
| Максимальное время зависания (в штиль) |
20 минут |
| Максимальное расстояние полета (в штиль) |
10 км |
| Максимально допустимая скорость ветра |
29—38 км/ч (8—10,5 м/с) |
| Максимальный угол наклона | режим S: 35°; режим P: 15° |
| Максимальная угловая скорость | 250°/с |
| Диапазон рабочих частот | 2,4000—2,4835 ГГц |
| Мощность передатчика (ЭИИМ1) | CE2 ≤ 19 дБм; FCC3 ≤ 28 дБм; MIC4 ≤ 19 дБм; SRRC5 ≤ 19 дБм |
| Поддержка спутниковых систем позиционирования | GPS и Глонасс |
| Точность позиционирования | в вертикальной плоскости: ±0,1 м при включенной и ±0,5 м при выключенной системе визуального позиционирования; в горизонтальной плоскости: ±0,1 м при включенной и ±1,5 м при выключенной системе визуального позиционирования |
| Объем встроенного хранилища | 8 ГБ |
| Диапазон рабочих температур | 0—40 °C |
| Размеры | в сложенном виде: 168×83×49 мм; в рабочем состоянии: 168×184×64 мм |
| Размер по диагонали | 213 мм |
| Взлетный вес | 430 г |
1 ЭИИМ — эффективная изотропно излучаемая мощность; интегральная энергетическая характеристика радиопередатчика. Вычисляется как произведение мощности радиочастотного сигнала, подводимого к антенне, на абсолютный коэффициент усиления антенны; измеряется в единицах мощности (Вт, дБВт, дБм). Устанавливается программным обеспечением квадрокоптера (автоматически по данным системы глобального спутникового позиционирования) в зависимости от региона, в котором в настоящий момент находится летательный аппарат.
2 CE — Conformité Européenne (Евросоюз).
3 FCC — Federal Communications Commission (США).
4 MIC — Ministry of Internal Affairs and Communications (Япония).
5 SRRC — State Radio Regulation Committee (Китай).
Система визуального позиционирования
| Передние датчики | диапазон точного измерения: 0,5—12 м; общий диапазон: 0,5—24 м; скорость обнаружения препятствий: ≤8 м/с; поле обзора (FOV): 50° в горизонтальной плоскости, ±19° в вертикальной плоскости |
|---|---|
| Задние датчики | диапазон точного измерения: 0,5—10 м; общий диапазон: 0,5—20 м; скорость обнаружения препятствий: ≤8 м/с; поле обзора (FOV): 50° в горизонтальной плоскости, ±19° в вертикальной плоскости |
| Нижние датчики | диапазон высот: 0,1—8 м; рабочий диапазон: 0,5—30 м |
| Рабочие условия | передняя, задняя и нижняя система обзора: поверхность с видимой текстурой и коэффициентом отражения >20%, уровень освещенности >15 лк |
Система стабилизации изображения
| Тип | трехосевая (продольная, поперечная, вертикальная оси вращения) |
|---|---|
| Механический диапазон углов вращения | наклон от −100° до +22°; крен от −30° до +30°; поворот от −12° до +12° |
| Рабочий диапазон углов вращения | наклон: от −90° до 0° (по умолчанию), от −90° до +17° (в расширенном режиме) |
| Максимальная угловая скорость перемещения (наклон) | 120°/с |
| Диапазон угловых вибраций | ±0,005° |
Камера
| Сенсор | ½,3″ CMOS, 12 млн эффективных пикселей |
|---|---|
| Диапазон эквивалентной светочувствительности | видео: ISO 100—3200 (автомат и ручная установка); фото: ISO 100—1600 (автомат) и ISO 100—3200 (ручная установка) |
| Объектив | встроенный (несменный); фокусное расстояние 4 мм (24 мм в эквиваленте «полному кадру» 36×24 мм); угол обзора 85°; диафрагма f/2,8 (фиксированная); глубина резкости от 0,5 м до ∞ |
| Затвор | электронный |
| Диапазон выдержек | 8—1/8000 с |
| Формат фотофайлов | JPEG (Exif 2.3), DNG (RAW) |
| Режимы фотосъемки | одиночный снимок; расширенный динамический диапазон (HDR); съемка серией по 3, 5 или 7 кадров; автоматический экспобрэкетинг по 3 или 5 кадров с шагом в 0,7 EV; интервальная съемка (таймлапс) по 2, 3, 5, 7, 10, 15, 20, 30, 60 с; автопанорамы 3×1; 3×3, горизонтальная 180°, сферическая |
| Максимальный размер фотографии | 4:3: 4056×3040 (12 Мп); 16:9: 4056×2280 (9 Мп); автопанорамы: 3×1 — 42°×78°, 2048×3712 (7,6 Мп); 3×3 — 119°×78°, 4096×2688 (11 Мп); 180° — 251°×88°, 6144×2048 (12,6 Мп); сферическая (3×8+1) — 8192×4096 (33,6 Мп) |
| Разрешение видео | 4K (Ultra HD): 3840×2160 24/25/30p; 2.7K: 2720×1530 24/25/30/48/50/60p; Full HD: 1920×1080 24/25/30/48/50/60/120p; HD: 1280×720 24/25/30/48/50/60/120p |
| Максимальный битрейт видео | 100 Мбит/с |
| Форматы записи видео | MP4 или MOV (H.264/MPEG-4 AVC) |
| Поддержка карт памяти | microSD UHS-I Class 10; 16 ГБ (Sandisk Extreme и Kingston SDHC-I SDCAC); 32 ГБ (Sandisk Extreme V30, V30 A1, Extreme Pro V30 A1); 64 ГБ (Sandisk Extreme V30 A1, Extreme Pro V30 A1); 128 ГБ (Sandisk Extreme V30 A1, Extreme Plus V30 A1) |
Пульт дистанционного управления
| Диапазон рабочих частот | 2,400—2,4835 ГГц |
|---|---|
| Дальность передачи сигнала (на открытом пространстве) | CE1: 2000 м; FCC2: 4000 м; MIC3: 2000 м; SRRC4: 2000 м |
| Диапазон рабочих температур | 0—40 °C |
| Мощность передатчика (ЭИИМ5) | CE1: ≤18 дБм; FCC2: ≤26 дБм; MIC3: ≤18 дБм; SRRC4: ≤18 дБм |
| Емкость встроенной аккумуляторной батареи | 2970 мА·ч |
| Рабочий ток/напряжение | 140 мА/3,7 Вт (Android) 750 мА/3,7 Вт (iOS) |
| Размеры совместимых устройств | длина до 160 мм; толщина 6,5—8,5 мм |
| Типы интерфейсных разъемов | Lightning; Micro-USB (Type-B); USB Type-C |
1 CE — Conformité Européenne (Евросоюз).
2 FCC — Federal Communications Commission (США).
3 MIC — Ministry of Internal Affairs and Communications (Япония).
4 SRRC — State Radio Regulation Committee (Китай).
Управление с помощью мобильного устройства
| Диапазон рабочих частот | 2,400—2,4835 ГГц |
|---|---|
| Дальность передачи сигнала (на открытом пространстве) | до 80 м по горизонтали; до 50 м по вертикали |
Источник питания летательного аппарата
| Тип | Intelligent Flight Battery; литий-полимерный аккумулятор (LiPo 3S) |
|---|---|
| Емкость/производимая энергия | 2375 мА·ч/27,43 Вт·ч |
| Выходное напряжение | 11,55 В |
| Максимальное напряжение заряда | 13,2 В |
| Диапазон рабочих температур при заряде | от +5 до +40 °C |
| Максимальная мощность зарядного устройства | 60 Вт |
Зарядное устройство
| Номинальная мощность | 50 Вт |
|---|---|
| Напряжение | 13,2 В |
| Вход | 100—240 В 50/60 Гц; 1,4 А |
| Выход | главный: 13,2 В/3,79 A USB: 5 В/2 А |
Управляющее программное приложение
| Наименование | DJI Go 4 (Google Play и App Store) |
|---|---|
| Системные требования | Android 4.4; iOS 9.0 |
| Передача видео | усиленный Wi-Fi |
| Качество трансляции видео с камеры | пульт управления, мобильное устройство и DJI Goggles: 720p при 30 кадрах/с |
| Задержка сигнала (зависит от условий среды и мобильного устройства) | 170—240 мс |
Конструкция и дизайн
DJI Mavic Air представляет собой четырехмоторный БПЛА (квадрокоптер) со съемными лопастями пропеллеров и складными плечами. Для облета препятствий дрон оснащен тремя системами обзора: передней, задней и нижней. Камера аппарата снабжена механическим стабилизатором (подвесом).
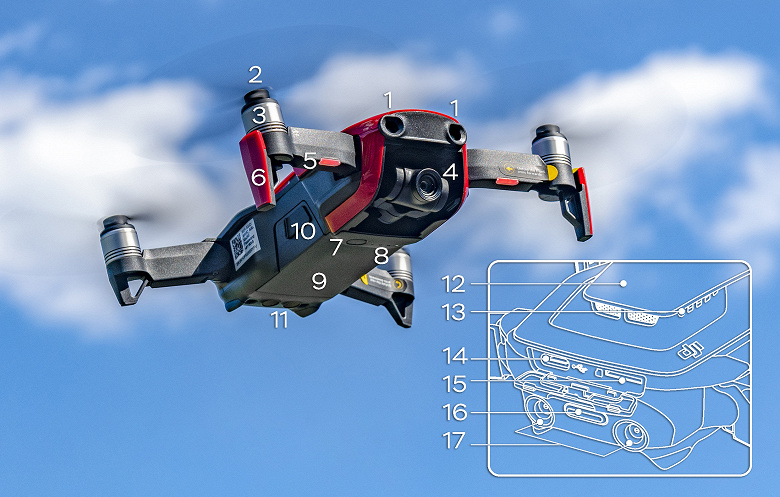 1 — система переднего обзора; 2 — пропеллеры; 3 — бесщеточные моторы; 4 — камера с подвесом (стабилизатором); 5 — передние позиционные огни; 6 — переднее посадочное шасси (встроенные антенны); 7 — кнопка питания; 8 — индикатор уровня заряда; 9 — аккумуляторная батарея; 10 — фиксатор аккумулятора; 11 — система нижнего обзора; 12 — сенсор GPS; 13 — решетка вентилятора системы охлаждения; 14 — порт USB-С; 15 — слот для microSD; 16 — кнопка функций с встроенным светодиодным индикатором состояния летательного аппарата; 17 — система заднего обзора.
1 — система переднего обзора; 2 — пропеллеры; 3 — бесщеточные моторы; 4 — камера с подвесом (стабилизатором); 5 — передние позиционные огни; 6 — переднее посадочное шасси (встроенные антенны); 7 — кнопка питания; 8 — индикатор уровня заряда; 9 — аккумуляторная батарея; 10 — фиксатор аккумулятора; 11 — система нижнего обзора; 12 — сенсор GPS; 13 — решетка вентилятора системы охлаждения; 14 — порт USB-С; 15 — слот для microSD; 16 — кнопка функций с встроенным светодиодным индикатором состояния летательного аппарата; 17 — система заднего обзора.Внутреннее устройство БПЛА довольно сложное, но о нем никто не распространяется. Полагаю, что нам не стоит довольствоваться слухами, и поэтому расскажу только о том, что не вызывает сомнений.


Если попытаться понять что-либо по рисункам, приводимым производителем на его официальном сайте, можно утверждать лишь то, что у БПЛА есть бортовой компьютер с неизвестным процессором и мощной системой охлаждения. Как и всегда в последние годы, акцент в описаниях сложных изделий смещен с особенностей внутреннего устройства на специфику внешнего вида.
Ну что ж… Замечу, что DJI Mavic Air выпускается в трех вариантах оформления: белом, красном и черном. Каждый из них по-своему эстетичен. Хочется надеяться, что других, более серьезных отличий обнаружить не удается.
 белый (Arctic White)
белый (Arctic White)  красный (Flame Red)
красный (Flame Red)  черный (Onyx Black)
черный (Onyx Black)
В сложенном состоянии квадрокоптер занимает площадь меньше моей ладони, и — это следует подчеркнуть особо — компактность является едва ли не самым привлекательным его качеством.


Хранение и переноска DJI Mavic Air — дело необременительное: для самого аппарата и всех его причиндалов можно без труда найти пространство в крупном фоторюкзаке, при этом не слишком сильно потеснив в нем другое съемочное оборудование. Замечу здесь же, что нескладные дроны (DJI Phantom, Xiaomi Mi и прочие) потребуют в багаже отдельного места, то есть отдельного рюкзака.
Привести DJI Mavic Air в рабочее состоянии можно менее чем за полминуты. Сначала нужно разложить аппарат, развернув задние плечи на 180° и отведя передние от корпуса на 120° вперед.


Спереди следует снять защитную крышку подвеса камеры (она же — защитный колпачок для объектива), а также опустить вниз небольшие «копытца» передних моторов, которые, кстати, также служат антеннами для приема и передачи радиосигнала.
Приготовлений требует и пульт ДУ — в интересах компактности он тоже хранится в сложенном состоянии. Первым делом следует развести в стороны детали кронштейна для удержания мобильного устройства, извлечь миниатюрные ручки и ввернуть их в полусферы джойстиков управления.
 пульт с установленными
пульт с установленными
ручками джойстиков управления  пульт в разложенном состоянии,
пульт в разложенном состоянии,
готов к установке смартфона  пульт с подключенным
пульт с подключенным
смартфоном,
в рабочем состоянии
Затем следует разложить антенны, подключить USB-кабель к гнезду смартфона, вложить мобильное устройство между компонентами крепления и зафиксировать его.
Комплектация
Согласно традиции производителя, сложившейся со времен более ранних моделей квадрокоптеров, DJI Mavic Air поставляется в двух вариантах комплектации: стандартном минимальном и расширенном (Fly More Combo), которые существенно разнятся.
| Стандартный минимальный набор | Комплект Fly More Combo |
|---|---|
 |
 |
| Квадрокоптер, жесткий футляр для него, пульт ДУ и три интерфейсных кабеля с разными разъемами (Lightning, USB Type-С и Micro-USB) для подключения к пульту портативных устройств, одна батарея питания дрона, зарядное устройство, кабель с разъемом USB Type-С для подключения квадрокоптера к ПК, два запасных комплекта пропеллеров и один комплект бамперов для них. | Квадрокоптер, жесткий футляр для него, пульт ДУ и три интерфейсных кабеля с разными разъемами (Lightning, USB Type-С и Micro-USB) для портативных устройств, три батареи для дрона, зарядное устройство, кабель USB Type-С для подключения квадрокоптера к ПК, три запасных комплекта пропеллеров, один комплект бамперов и сумка для переноски дрона, батарей и пульта ДУ. |
Как выясняется после первых же шагов в освоении дрона, комплектация Fly More Combo не только весьма выгодна по цене, но и чрезвычайно желательна с практической точки зрения. Дело в том, что всего одна батарея в стандартном наборе — это почти ничто, то есть этого слишком мало для эффективного освоения аппарата. В начальном периоде обладания дроном основное время его работы расходуется не на совершенствование навыков пилотирования и съемки, а на задачи другого рода, пусть и необходимые, но совершенно не те, с которым пользователь собирался иметь дело. Я имею в виду обновление прошивки, калибровку компаса, настройку органов управления, установку параметров фото- и видеосъемки и прочее в том же духе. С единственной же батареей пользователь обречен через каждые 15–17 минут бежать за ее подзарядкой и делать полутора-двухчасовые перерывы, что, согласитесь, не всегда возможно и попросту нежелательно.
Камера и подвес
Mavic Air располагает камерой смартфонного класса с матрицей типоразмера ½,3″. Компания DJI не указывает ее происхождения, но это не столь важно: преодолеть ограничения, диктуемые размерами сенсора (неширокий динамический диапазон, нетерпимость высоких ISO, выраженная «шумогенность») пока не в состоянии ни один производитель. Поэтому согласимся с тем, что изменить ничего нельзя, и дело нам предстоит иметь с системой, живущей по собственным законам и не подлежащей улучшениям.
Известно, что в камеру DJI Mavic Air ввернули простенький объектив с фиксированным фокусным расстоянием 4 мм (24 мм в эквиваленте полного кадра 24×36 мм) и фиксированной же диафрагмой F2,8. Оптическая система работает в гиперфокальном положении с обеспеченной глубиной резкости от 0,5 м до бесконечности; она лишена возможности любой (даже ручной) фокусировки. Зато ее стабилизацией занимается довольно сложная электронно-механическая система, именуемая в просторечии подвесом.
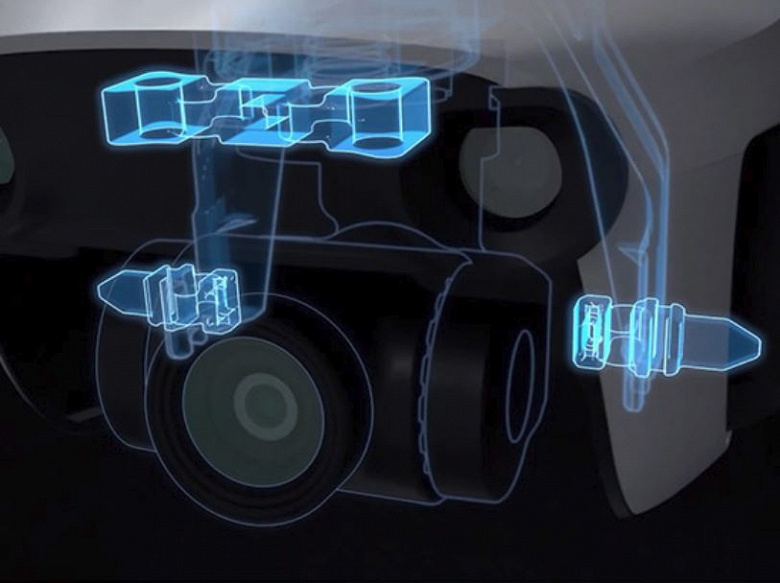
Этот подвес обеспечивает стабилизацию камеры за счет компенсации смещений по трем осям: продольной, поперечной и вертикальной. Проверить эффективность работы подвеса в плане получения выигрыша в длительности экспозиции — отдельная задача, которой я был просто не в состоянии заняться при подготовке этого материала.
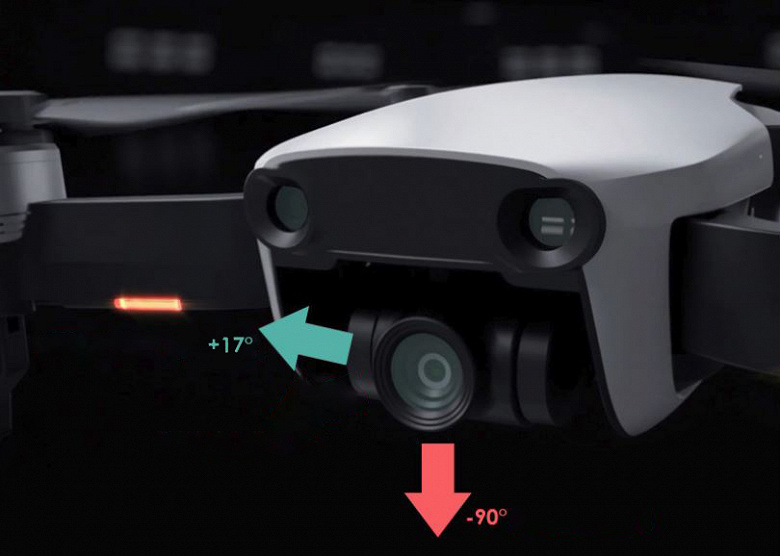
Помимо выигрыша в виде самой стабилизации, сервопривод подвеса позволяет перемещать камеру вдоль поперечной оси, направляя ее вниз (до 90°, «вид сверху вниз») и вверх (до 17°, «вид снизу вверх»). Это, кстати сказать, производится посредством специального колеса на пульте ДУ, который оказывается на его передней боковой поверхности, под левым указательным пальцем. Забегая вперед, замечу, что при максимальном отклонении подвеса с камерой вверх следует сильно ограничить горизонтальную скорость перемещения БПЛА, так как из-за образующегося в этом случае наклона горизонтальной плоскости дрона в поле зрения камеры попадают вращающиеся пропеллеры передних моторов. Поэтому я вообще не использовал эту позицию при полете; она требовалась мне лишь в ходе съемки сферической панорамы, когда дрон зависает неподвижно.
Определение препятствий
Весьма важным компонентом конструкции квадрокоптера является блок распознавания и облета препятствий на пути следования. Он работает по умолчанию в режиме P, а в режиме S (спортивном) отключается.
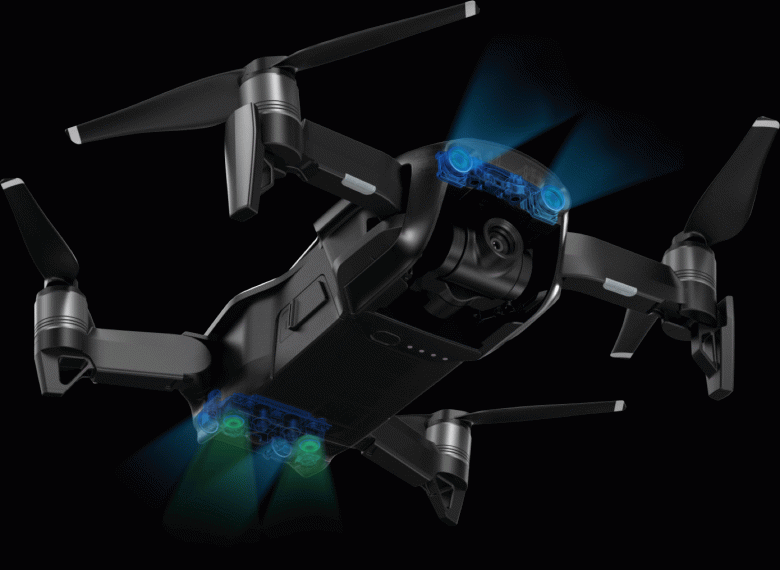 Передняя, задняя (синие) и нижняя (эеленая) системы обзора DJI Mavic Air
Передняя, задняя (синие) и нижняя (эеленая) системы обзора DJI Mavic AirВсе датчики системы парные, что дает возможность определять расстояние до объекта, возникающего на пути движения БПЛА, путем применения принципа дальномера. Впрочем, этим занимается не пилот, а бортовой компьютер дрона. И как он это делает — производственный секрет.

Углы зрения передней и задней систем ограничены полем 50° по горизонтали и 38° по вертикали (из-за пропеллеров, ограничивающих обзор), а нижней — 67° в длину и 53° в ширину. Детекция препятствий возможна на дистанции от 0,5 до 24 м. Боковых датчиков дрон не имеет — об этом всегда следует помнить при маневрировании на боковой тяге.
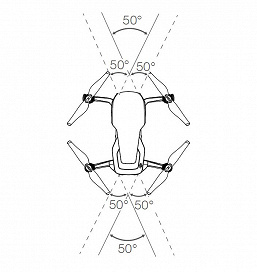 вид сверху
вид сверху 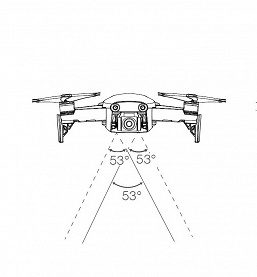 вид спереди
вид спереди 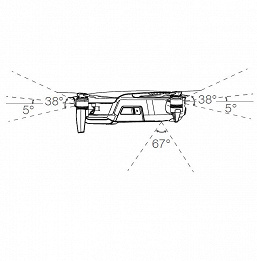 вид сбоку
вид сбоку
Преодоление препятствий работает в режиме P (позиционирование), при выполнении всех полетных программ и процедуры «возвращения домой» Return to Home, RTH).
Апгрейд и дополнительные аксессуары
Помимо очевидно необходимых запчастей — дополнительных аккумуляторов, запасных пропеллеров, держателей для планшетов с креплением на пульт ДУ, — есть целый ряд дополнений, потребность в которых возникает после приобретения первоначального опыта фото- и видеосъемки. К таковым относятся, например, светофильтры, бленды и насадки на объектив камеры, позволяющие изменять угол его обзора.
С первыми двумя категориями «довесков» дела обстоят как нельзя лучше: их можно долго и придирчиво выбирать, благо предложений очень много (на eBay, Amazon, AliExpress и т. д.).
К сожалению, с конвертерами, изменяющих угол обзора объектива камеры, ситуация неутешительная: достаточно легких решений, которые выдерживала бы хрупкая и нежная система стабилизации камеры, пока не создано. Поэтому пользователь вполне может решиться на более сложный шаг: навесить на квадрокоптер дополнительную экшн-камеру. Однако и такой подход может не сработать, поскольку DJI Mavic Air заметно ограничен грузоподъемностью и спецификой аэродинамики.
Я долго пытался установить, какой дополнительный груз дрон способен поднять в воздух. Эксперименты дали довольно скромный результат: около 200 г. С учетом необходимости крепить вторую камеру к корпусу (в моем случае — к батарее, так удобнее) и вес такого крепления (с «липучкой», винтами и другими приспособлениями) многие экшн-камеры и регистраторы просто выбывают из игры. Без особых опасений можно использовать GoPro Hero 4/5/6, Yi 4K и их аналоги. Однако важно помнить, что длительность полета с дополнительным оборудованием очень сильно сокращается.
С камерами, снимающими сферические панорамы (например, Samsung Gear 360), возникает и другая проблема. Дело в том, что их объективы следует хотя бы немного опустить по отношению к нижней поверхности дрона, чтобы уменьшить перекрытие верхней полусферы фюзеляжем и винтами. А вот этого сделать уже нельзя: торчащая вниз крепежная штанга работает как стабилизатор, не дающий возможности летательному аппарату поддерживать положение в пространстве за счет наклонов корпуса. В ходе моих экспериментов с камерой Samsung Gear 360, прикрепленной к DJI Mavic Air на вертикальной пластмассовой опоре (длина 20 см), дрон во время взлета просто заваливался на бок и падал.
Управление
Квадрокоптером можно управлять с помощью пульта ДУ, со смартфона и посредством жестов, которые распознает «машинное зрение» DJI Mavic Air. Все три варианта требуют установки на мобильное устройство «фирменного» приложения DJI Go, представленного в двух разных вариантах, для Android и для iOS.
Начать следует с установления связи между квадрокоптером и пультом ДУ (с подключенным к нему мобильным устройством). Для этого включаем питание квадрокоптера, а после его перехода в рабочий режим — питание пульта ДУ.
При первом запуске приложения нужно зарегистрировать дрон на серверах DJI. Успешное сопряжение пульта ДУ с дроном будет автоматически запускать на подключенном смартфоне приложение DJI Go. Его функциональность довольно богатая.
 После установления связи с Mavic Air
После установления связи с Mavic Air
активируется Go Fly (начать полет)  Меню приложения:
Меню приложения:
карты, журнал, найти дрон и др. 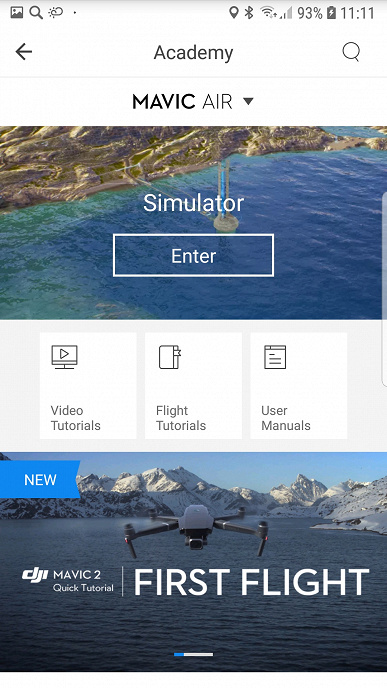 Академия: симулятор, видеоуроки,
Академия: симулятор, видеоуроки,
руководство пользователя 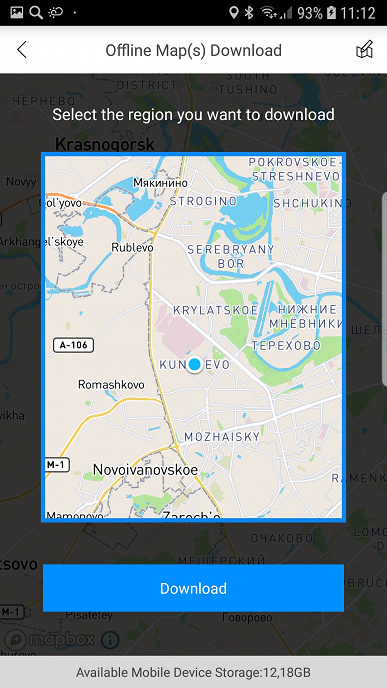 При недоверии к качеству мобильной передачи
При недоверии к качеству мобильной передачи
данных можно загодя скачать
полетные карты нужного региона 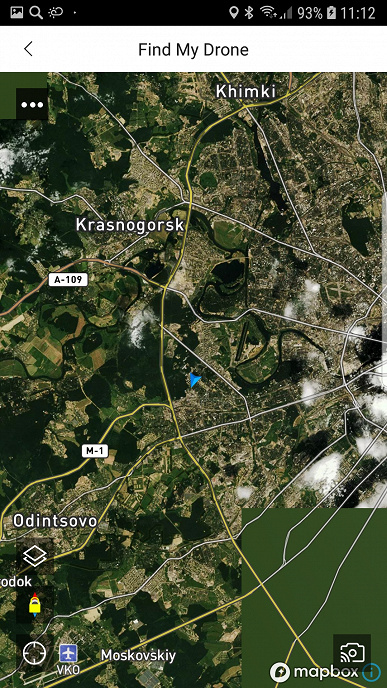 Если дрон совершил посадку вне поля зрения,
Если дрон совершил посадку вне поля зрения,
его можно найти по карте по координатам
при помощи GPS-трекера 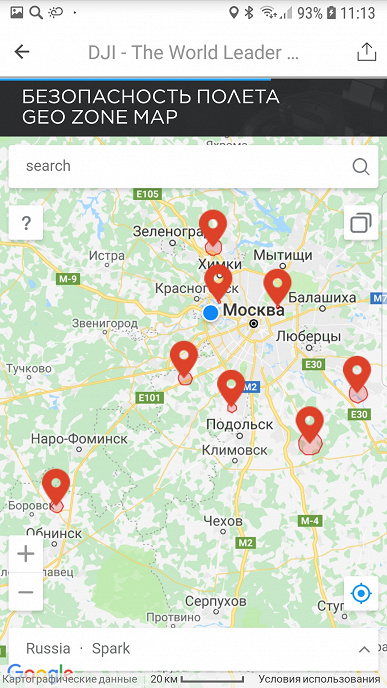 Области, неблагоприятные или
Области, неблагоприятные или
вовсе запрещенные для пилотирования,
хранятся в базе данных DJI
Если сразу начинать полет, коснувшись пальцем синей закладки Go Fly, то приложение сначала выведет список параметров, установленных в квадрокоптере по умолчанию.

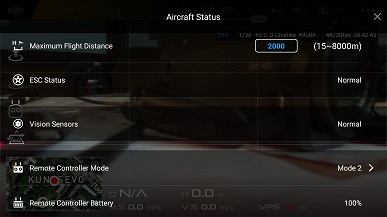
При закрытии этого прокручиваемого списка DJI Go покажет на экране вид глазом (то есть камерой) дрона и даст возможность начать управление квадрокоптером. Ниже я разъясню, как выглядит главный экран на мобильном устройстве, подключенном к пульту ДУ. Фиолетовые номера — введенные мною обозначения, которые на экране не отображаются. Они приведены лишь для удобства распознавания соответствующих зон.
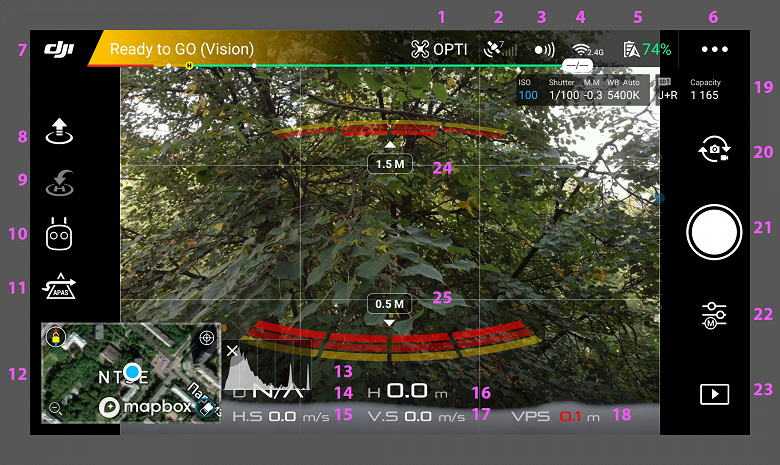
1 — режим полета (Opti, оптимальный); 2 — количество доступных спутников GPS; 3 — состояние систем переднего и заднего обзора; 4 — настройки Wi-Fi; 5 — уровень заряда аккумулятора; 6 — меню общих настроек; 7 — строка для сообщений; 8 — активация автоматического взлета; 9 — активация автоматического «возвращения домой» (RTH, Return to Home); 10 — автоматические режимы полета; 11 — расширенный автопилот; 12 — карта региона полета; 13 — яркостная гистограмма текущей сцены; 14 — удаление квадрокоптера от домашней точки; 15 — горизонтальная скорость; 16 — высота от домашней точки; 17 — вертикальная скорость; 18 — вертикальная позиция; 19 — параметры съемки; 20 — переключение режимов съемки с фото на видео и обратно; 21 — спуск затвора (фото), активация съемки панорамы или съемки видео; 22 — меню настроек камеры; 23 — воспроизведение (просмотр) фото и видео; 24 — обнаружение препятствий спереди (и дистанция до них); 25 — обнаружение препятствий сзади (и дистанция до них).
Калибровка компаса
До первого полета, а также после каждого перемещения БПЛА на географическое расстояние от 50 км и более придется выполнить калибровку компаса. Кстати, приложение DJI Go само потребует этого при необходимости.
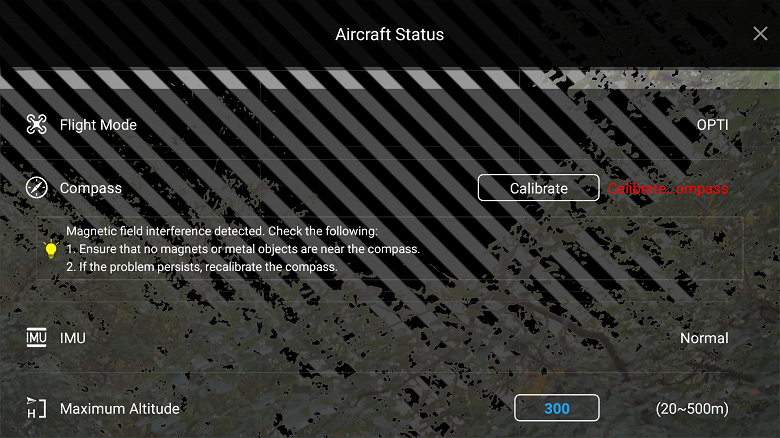
Начинаем процедуру калибровки тапом по надписи Calibrate.
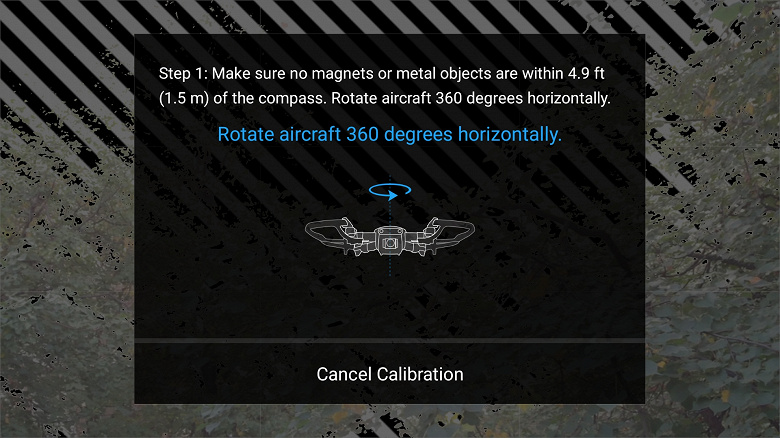
На первой стадии следует повернуть дрон на 360° против часовой стрелки в горизонтальной плоскости. Я убедился, что проще делать это собственным телом, просто держа квадрокоптер над головой.
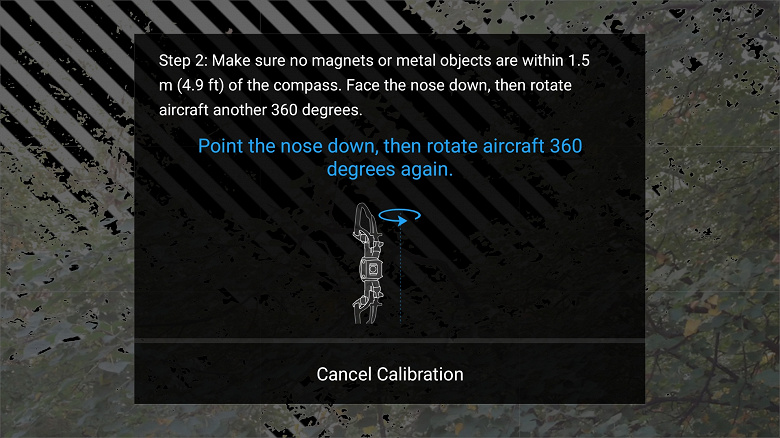
На второй стадии следует опустить нос БПЛА вниз и описать круг в вертикальной плоскости (опять-таки, удобнее сделать это собственным телом). Если калибровка не удалась с первого раза, ее нужно повторять до тех пор, пока не будет достигнут успех.
По завершении юстировки компаса можно взлетать. Самый простой вариант запуска двигателей — переместить джойстики пульта ДУ вниз и в направлении друг к другу либо, наоборот, в разные стороны.
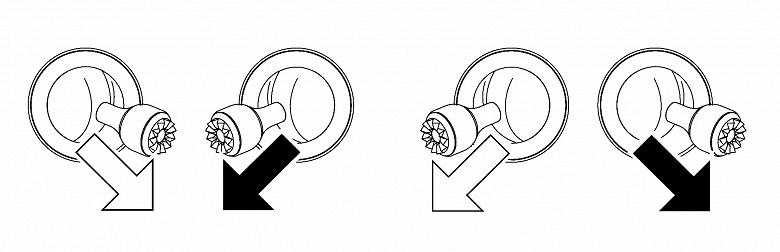 Два варианта позиционирования джойстиков для запуска двигателей дрона
Два варианта позиционирования джойстиков для запуска двигателей дронаВ результате начнется вращение пропеллеров. После запуска отпустим оба джойстика и двинем вперед (от себя) левый — дрон взлетает. В качестве альтернативы можно использовать и автоматическую процедуру взлета, коснувшись пиктограммы с фиолетовым номером 8 (см. выше). Дрон запустит двигатели, поднимется на высоту примерно 1,2 м над поверхностью земли и зависнет в ожидании дальнейших команд пилота.
Если система глобального позиционирования аппарата получает сигналы от спутников GPS/Глонасс, то почти тотчас после взлета программное приложение уведомит о записи в память БПЛА координат «домашней точки» — того места, откуда он стартовал и куда ему нужно будет вернуться при активации режима RTH (Return to Home, «возвращение домой»).
Установки дрона
Нужно понимать, что DJI Mavic Air — не совсем игрушка, это инструмент для фото- и видеосъемки, который технологически сложнее любой современной камеры. Сложнее он хотя бы потому, что умеет летать и выполнять автоматически не только фото-, но и видеосъемку — в соответствии с набором программ. Не следует относиться к нему легкомысленно и сразу рваться ввысь, не разобравшись в особенностях пилотирования. Перед первым полетом, равно как и перед началом всех последующих, нужно все правильно настроить.
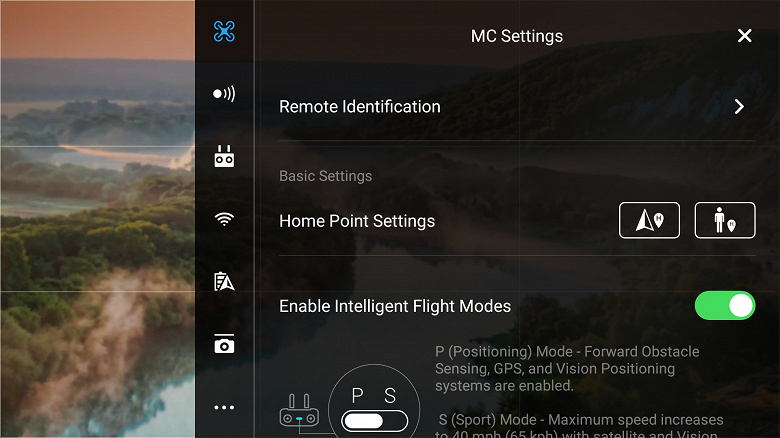
Home Point Settings позволяет проконтролировать координаты записанной «домашней точки». Enable Intelligent Flight Modes позволяет выбрать один из двух режимов полета — P (позиционирование) или S (спортивный). В первом случае работают все датчики дрона, и он в состоянии облетать препятствия, выбирать место, подходящее для посадки, но скорости полета, подъема и снижения ограничены. Во втором случае снимаются все ограничения, но БПЛА «слепнет» и может быть легко поврежден препятствиями на пути следования. Возможность изменить режим с H на S предоставляет еще и механический переключатель, расположенный точно посередине между джойстиками пульта ДУ.
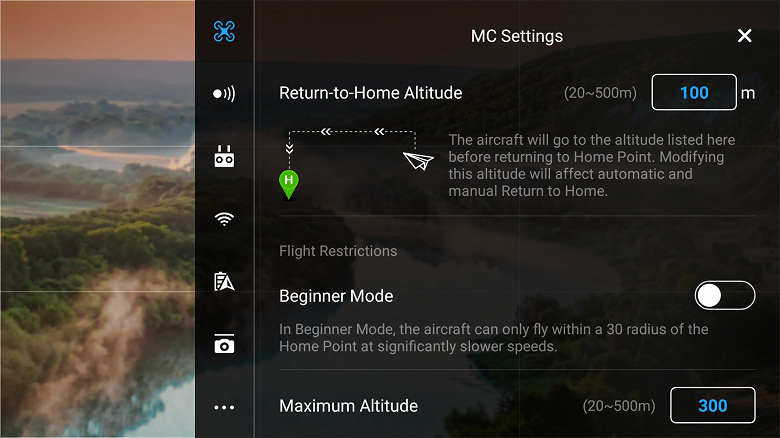
Return-to-Home Altitude определяет высоту полета дрона при выполнении программы «возвращение домой». Активация Beginner Mode дает возможность на первых порах ограничить скорость и максимальное удаление аппарата по горизонтали и вертикали.
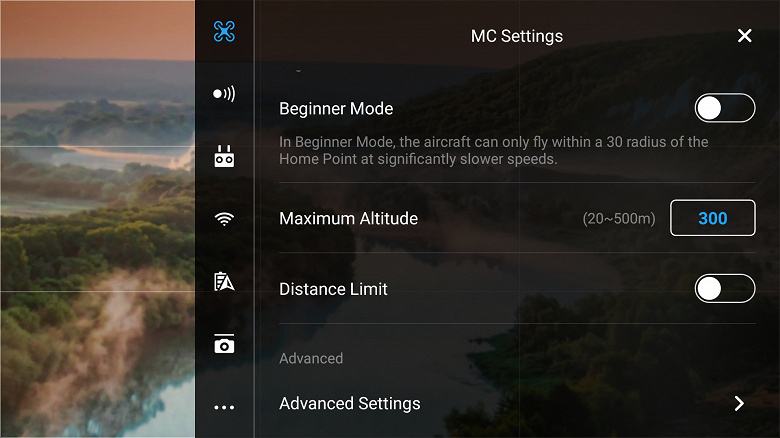
Дополнительно можно вводить для себя ограничения максимальной высоты и максимального удаления БПЛА (Distance Limit).
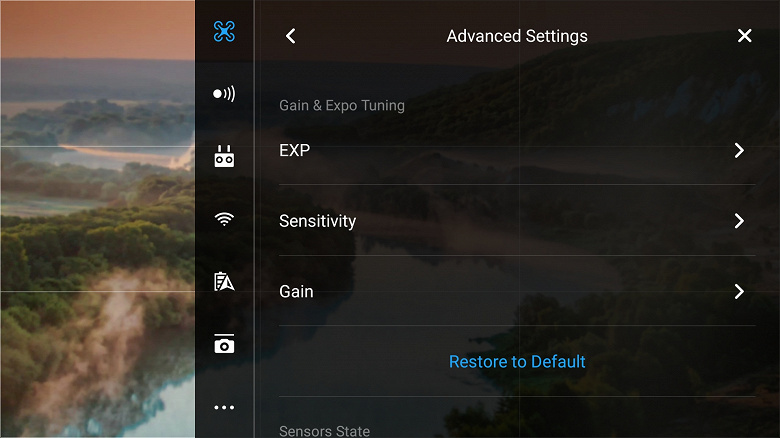
Расширенные настройки позволяют устанавливать чувствительность джойстиков и максимальные значения линейных и угловых ускорений при маневрировании.
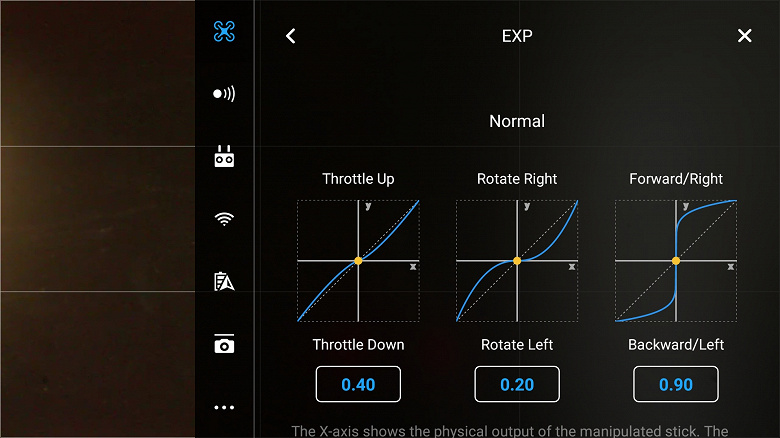
Плавность и скорость изменения тяги в ответ на подъемную тягу, вращение и горизонтальное ускорение.
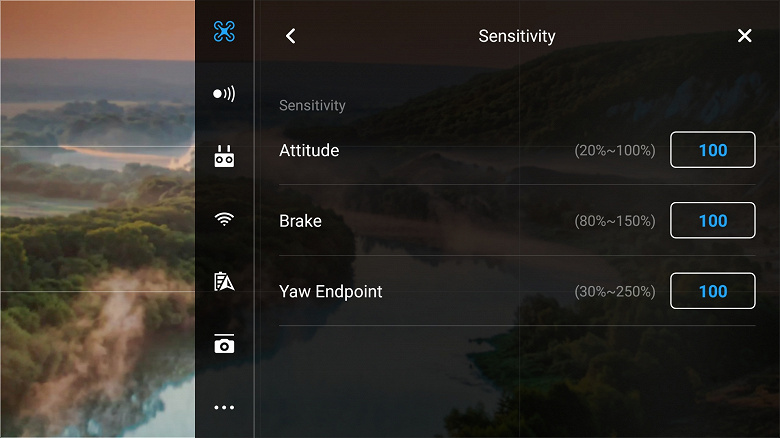
Параметры чувствительности управления тягой: усилие, торможение, конечная точка рыскания.
Установки визуальной навигации
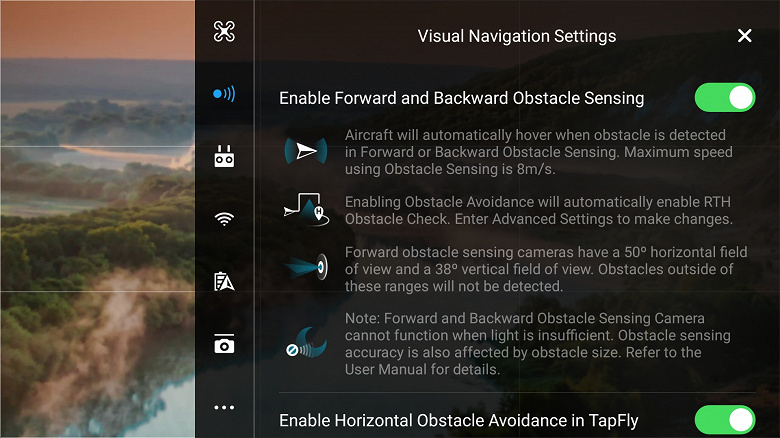
Активация системы сенсоров.
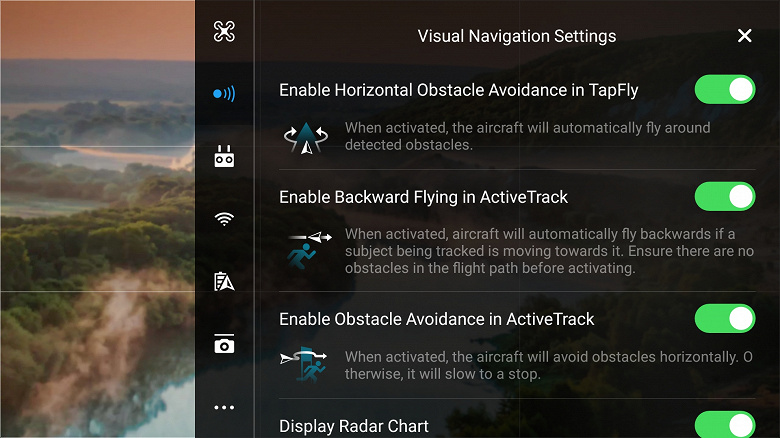
Включение системы преодоления препятствий при горизонтальном перемещении, при движении назад, в режиме слежения за объектами.
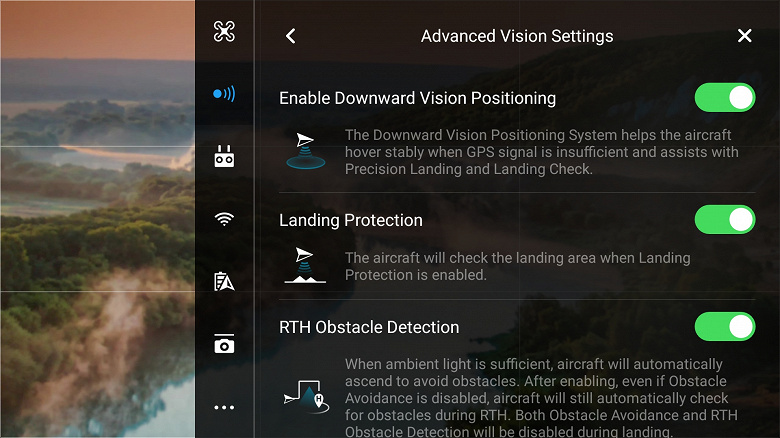
Активация системы преодоления препятствий при снижении дрона; защита от столкновений при посадке и в режиме «возвращения домой».
В начальном периоде освоения управления дроном рекомендуется оставлять все подсистемы в режиме «включено», дабы избежать всевозможных неприятностей.
Настройка пульта ДУ
Приложение DJI Go позволяет до известных пределов изменять конфигурацию органов управления пультом ДУ.
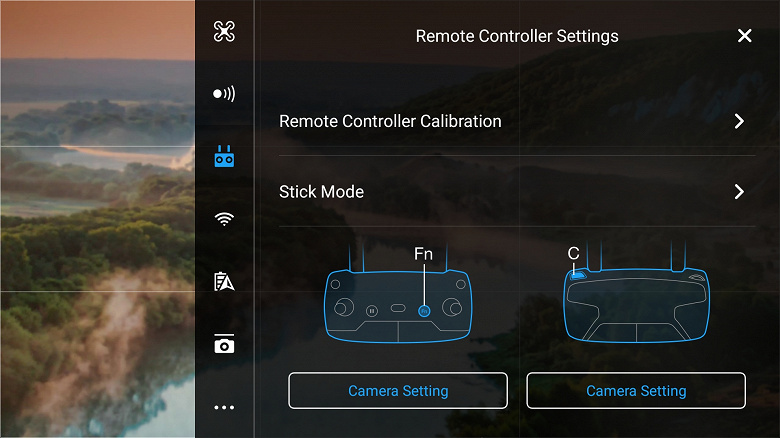
Назначение функциональных кнопок.
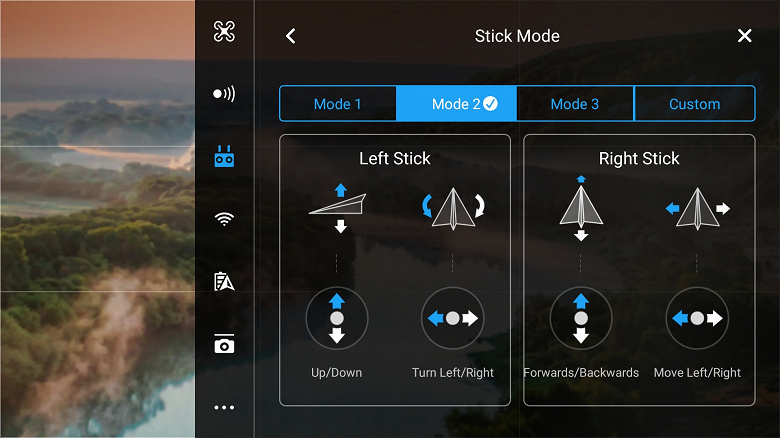
Изменение режимов работы джойстиков.
Установки камеры
При съемке доступны автоматический и ручной режимы установки экспозиционных параметров, однокадровая, серийная и интервальная съемка, создание панорам.
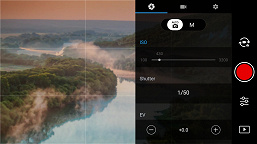 Автоматический режим фото
Автоматический режим фото 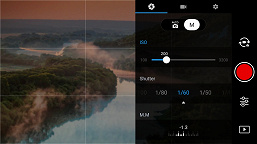 Ручной режим (M).
Ручной режим (M).
Можно выбрать значение ISO,
длительность выдержки
и степень экспокомпенсации 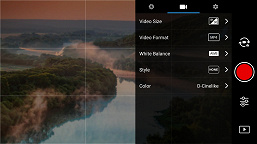 Параметры видеосъемки
Параметры видеосъемки 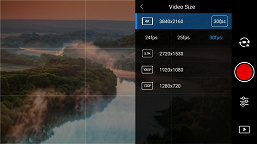 Разрешение видео
Разрешение видео 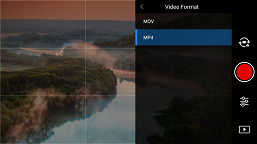 Формат записи видео
Формат записи видео 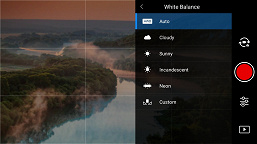 Предустановки баланса белого
Предустановки баланса белого 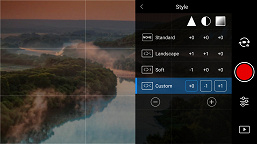 Предустановки резкости,
Предустановки резкости,
яркости, контрастности 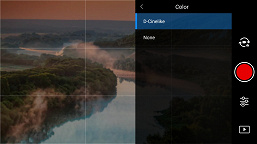 Параметры цветности
Параметры цветности 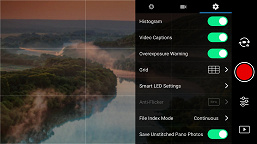 Общие параметры съемки
Общие параметры съемки  Режимы фотосъемки:
Режимы фотосъемки:
одиночный снимок, HDR, серия,
автоэкспобрэкетинг,
интервальная съемка, панорама 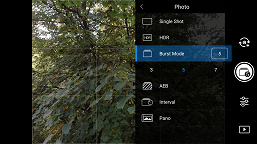 Непрерывная фотосъемка
Непрерывная фотосъемка
возможна серией
от 3 до 7 кадров 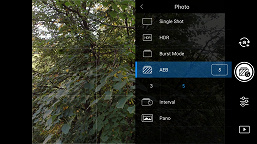 Автоматический
Автоматический
экспозиционный брэкетинг
в серии по 3 или 5 кадров 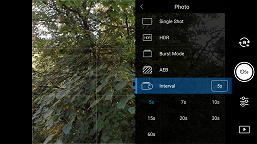 Покадровая съемка
Покадровая съемка
с интервалами
5, 7, 10, 15, 20, 30, 60 с 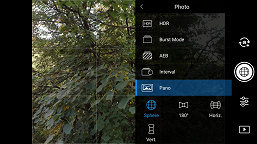 Режим панорамы:
Режим панорамы:
сферическая (360°), 180°,
горизонтальная и вертикальная 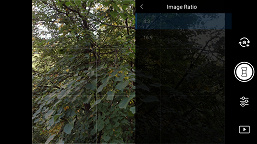 Соотношение размеров:
Соотношение размеров:
4:3 или 16:9 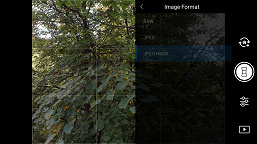 Запись фото возможна
Запись фото возможна
в RAW, JPEG и JPEG+RAW 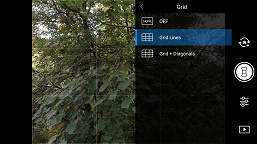 Варианты отображения сетки,
Варианты отображения сетки,
облегчающей кадрирование  Выключение позиционных огней
Выключение позиционных огней
дрона при фото- и видеосъемке
Скажу откровенно: настраивая все эти параметры, я первым делом заставил аппарат сохранять фотоснимки в JPEG и RAW одновременно и впоследствии ни разу не отменил свое решение, поскольку JPEG можно использовать только для просмотра, а постобработка DNG может давать намного более интересные результаты.
Режимы полета
При касании пальцем пи
Полный текст статьи читайте на iXBT
