Создан летающий робот без единого пропеллера — он словно птица парит в восходящих потоках
Учёные из Института интеллектуальных систем Общества Макса Планка в Тюбингене (Max Planck Institute for Intelligent Systems) и Штутгартского университета (University of Stuttgart) представили летающего робота Floaty, который держится в воздухе не за счёт винтов, а за счёт восходящего потока воздуха. Такой полёт требует намного меньше энергии по сравнению с коптерами и даже самолётами, а также может быть воплощён в управлении ракетами и метеозондами.

Источник изображения: Max Planck Institute for Intelligent Systems
Разработка воспроизводит аэродинамику птиц, использующих восходящие потоки воздуха: робот меняет аэродинамическую форму «оперения» и тем самым перераспределяет сопротивление воздушному потоку, чтобы зависать и даже маневрировать при минимальном расходе энергии своих аккумуляторов.
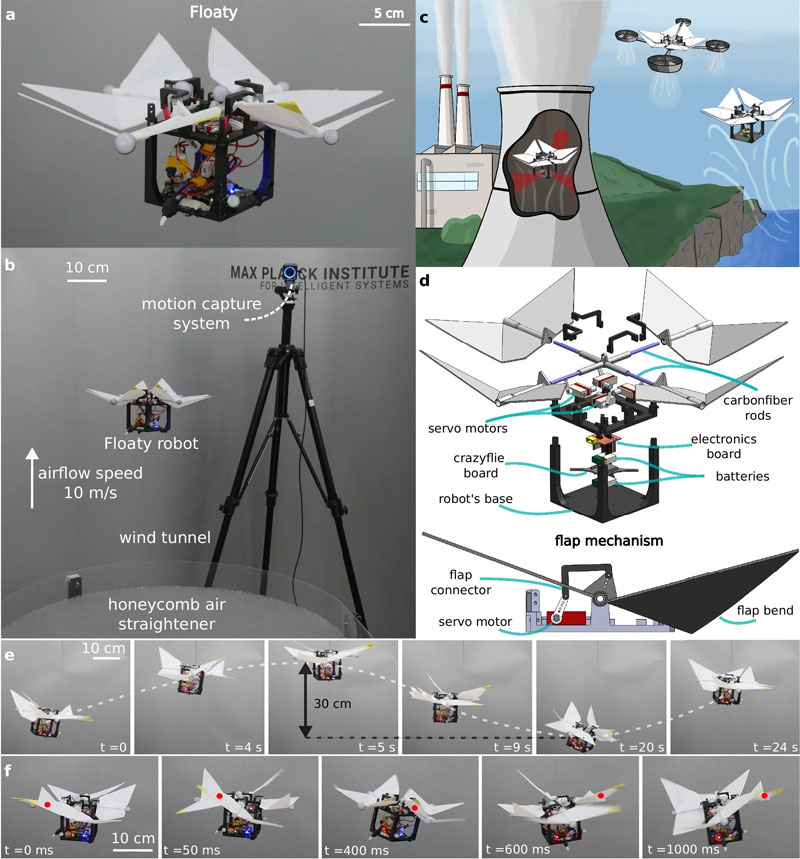
Робот Floaty оснащён четырьмя независимо управляемыми створками в верхней части корпуса. Поворачивая их, система изменяет эффективную площадь, обтекаемую воздушным потоком, и тем самым управляет подъёмной силой, креном, тангажом и рысканием. В отличие от квадрокоптера, робот не создаёт тягу: подъёмная сила фактически берётся из внешнего восходящего потока, а бортовые сервоприводы лишь меняют конфигурацию створок. Для управления использована экспериментально обученная аэродинамическая модель, позволяющая рассчитывать команды для створок и стабилизировать аппарат в условиях шести степеней свободы.
Источник изображения: Nature 2025
Ключевой инженерной проблемой была устойчивость в воздухе. Чтобы робот не заваливался набок, его центр масс опустили примерно на 7 см ниже плоскости створок, а сами створки выполнили с изгибом под углом 42,5°. В испытаниях в вертикальной аэродинамической трубе диаметром 1,2 м робот парил при скоростях потока 8–11 м/с, а его положение отслеживалось системой OptiTrack с частотой 200 Гц, тогда как управляющие команды передавались ему по радиоканалу.
В экспериментах Floaty массой 340 г зависал в рабочей зоне, выдерживал толчки и боковой поток со скоростью до примерно 4 м/с, то есть около 40% от скорости основного вертикального потока. При питании от двух LiPo-аккумуляторов ёмкостью 250 мА·ч он держался в воздухе в среднем около 33 минут, потребляя примерно 3,4 Вт, что соответствует около 10 Вт/кг. Для сравнения, обычные мультикоптеры при зависании обычно требуют порядка 100–250 Вт/кг.
Потенциальные области применения представленной схемы — инспекция дымовых труб и других промышленных объектов с сильными восходящими потоками, управление полезной нагрузкой метеозондов, наведение ракет при входе в атмосферу, а в перспективе — создание гибридных аппаратов, сочетающих пассивное парение с активной тягой.
© 3DNews
