Роботы научились разбирать препятствия
Роботов нынче учат всему. Очередной виток — преодоление препятствий.
Очень долгое время машины этого не умели. Они либо уклонялись от проблемы, либо просто шли напролом, ликвидируя все встречаемое на пути. В противном случае — начинались беспорядочные движения туда-сюда, и ничего более.
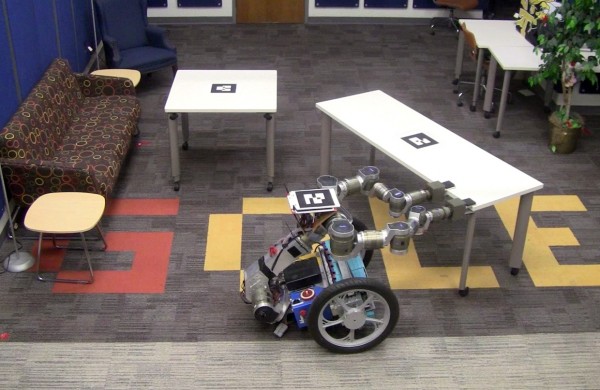
Теперь электромеханические создания подходят к преградам с умом — благодаря алгоритму Physics-Based Reinforcement Learning (PBRL) от Джонатана Шольца (представителя Google DeepMind). Презентация решения состоялась на конференции IROS 2016. Для наглядности общественность познакомили с Golem Krang.
Робот Golem Krang снабжен системой Navigation Among Movable Obstacle (NAMO), а также камерами в количестве 6 штук и несколькими манипуляторами для перестановки массивных предметов.
Теперь при встрече с каким-либо объектом, машина анализирует, как лучше действовать. Стоит ли продолжать попытки в случае малоэффективности подхода?
Golem Krang разбирает «баррикады», если это возможно. И никуда не ломится, попав в тупик.
You Can’t Stop Robots With Furniture Barricades Anymore — It used to be that even sophisticated mobile robots could be easily defeated by using (say) a table to block its way. The robot would sense the table, categorize it as an obstacle, try to plan a path around it, and then give up when its planner fails.
Tweet
