Робот-улитка может собирать микропластик в океане (видео)
Конструкция робота основана на гавайской яблочной улитке (Pomacea canaliculate). Это обычная аквариумная улитка, которая использует волнообразные движения своих ног, чтобы управлять потоком воды на поверхности и всасывать плавающие частицы пищи, пишет Techxplore.
Существующие устройства для сбора пластика обычно используют сети или конвейерные ленты, чтобы удалять крупный пластиковый мусор из воды. Однако они не эффективны в отношении микропластика — мельчайших частиц пластика. Микропластик может проникать в ткани морских животных и встраиваться в пищевую цепочку, представляя угрозу для здоровья и потенциально являясь канцерогенами для людей. Пластиковые отходы составляют 80% загрязнения морской среды, при этом каждый год около 8–10 миллионов тонн пластика попадает в океан.
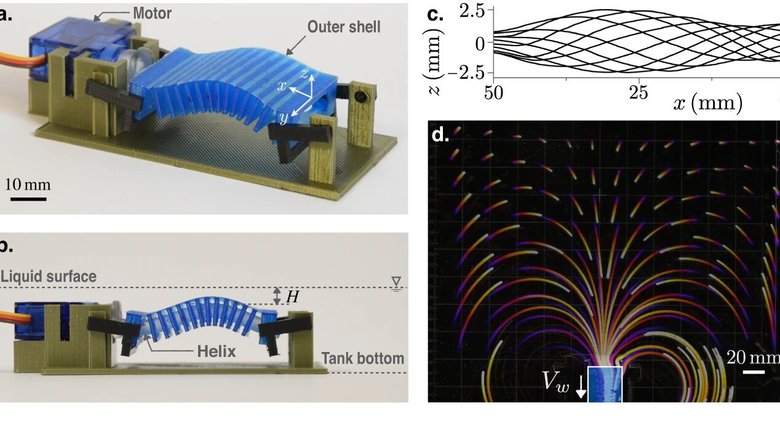
Прототип, модифицированный на основе существующей конструкции, необходимо будет масштабировать, чтобы он был практичным в реальных условиях. Исследователи использовали 3D-принтер, чтобы сделать гибкий лист, способный волнообразно двигаться. Спиральная структура под ним вращается, как штопор, приводя конструкцию в движение и создавая волну на поверхности воды.
Анализ движения жидкости был ключом к этому исследованию. Ученые изучили поток воды и поняли, как работает процесс перекачки. Исследователи пришли к выводу, что закрытая система, в которой насос использует трубку для всасывания воды и частиц, требует больших энергетических затрат. Вместо этого, открытая система, которая напоминает работу улитки, оказалась гораздо эффективнее. Прототип, хоть и небольшой, работал эффективно, потребляя всего 5 вольт электроэнергии для всасывания воды.
Из-за веса аккумулятора и двигателя исследователям, возможно, придется прикрепить к роботу плавучее устройство, чтобы он не затонул.
Ранее исследователи из Принстона разработали гибкого, легкого и энергоэффективного мягкого робота, который передвигается без использования ног или вращающихся частей.
