Разработка ученых позволит удаленно добывать ископаемые на Луне

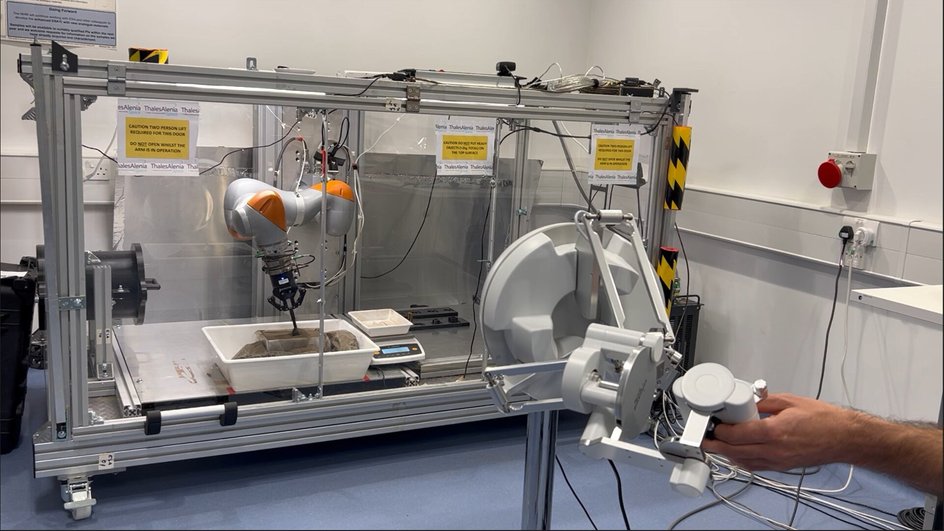
Ученые Университета Бристоля разработали систему, позволяющую управлять роботом на расстоянии с помощью виртуальной симуляции, сообщает Phys.org. Команда собрала образцы, управляя виртуальной моделью, которая в реальном времени синхронизировалась с физическим роботом. Благодаря этому методу отпадет необходимость в постоянной видеопередаче, что важно для выполнения задач в условиях задержки сигнала, например, при исследованиях на Луне.
Вместе с увеличением числа лунных миссий растет интерес к добыче полезных ископаемых на Луне. Ученые разрабатывают технологии извлечения ресурсов из лунного реголита, например кислорода и воды. Для этого нужны технологии дистанционного управления. С лунной пылью нелегко работать — она липкая и абразивная. К тому же, все это будет происходить в условиях пониженной гравитации.
Разработанная учеными симуляция позволит управлять лунными роботами удаленно с Земли, избегая проблемы задержек сигнала. Модель продемонстрировала высокую точность при прогнозировании результатов задачи по зачерпыванию симулянта реголита, достигнув показателей эффективности и надежности в 100% и 92,5% случаев соответственно. Кроме того, виртуальная система поможет астронавтам в подготовке к предстоящим миссиям по исследованию Луны. Благодаря регулировке силы тяжести и созданию тактильных ощущений, астронавты смогут почувствовать, как взаимодействовать с лунной пылью в условиях космической миссии, находясь при этом на Земле.
Использование виртуальной модели реголита снижает порог входа для разработчиков лунных роботов. Вместо того чтобы вкладывать средства в дорогостоящие симулянты лунной пыли или оборудовать специализированные лаборатории, инженеры могут проводить начальные испытания своих роботов прямо в виртуальной среде.
Теперь команда изучит, как люди адаптируются к управлению роботом с задержкой в несколько секунд. Даже если система с технической точки зрения эффективна, успешность ее применения зависит от того, насколько человек доверяет роботу и готов ли он мириться с перебоями в управлении. В следующем десятилетии планируется несколько пилотируемых и беспилотных миссий на Луну, например, миссия NASA «Артемида» и китайская программа «Чанъэ». Симуляция может стать ценным инструментом для их подготовки или проведения.
Ранее Axiom Space и Prada представили скафандр для высадки на Луну.
