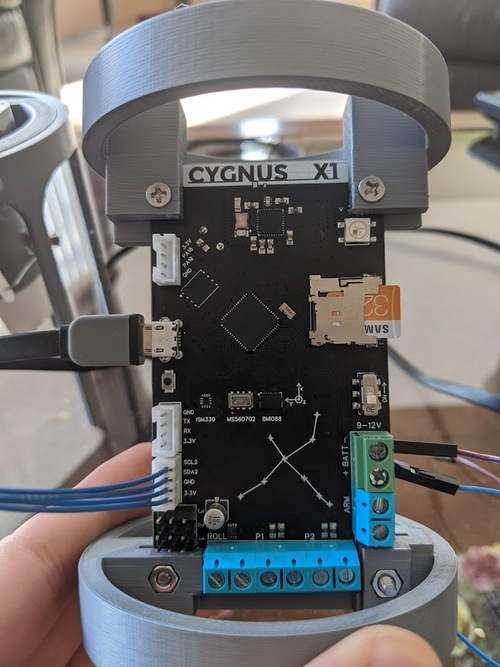
Представлена открытая плата управления ракетой Cygnus-X1
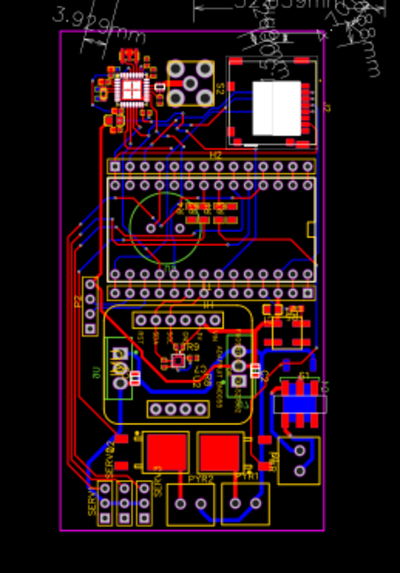
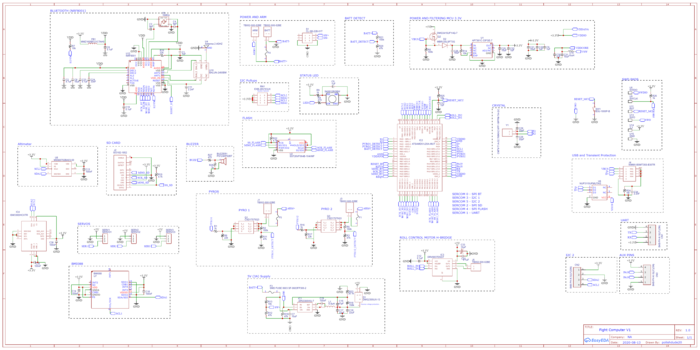
Проект Cygnus-X1 развивает открытую плату для управления вектором тяги реактивного двигателя и сопутствующими бортовыми системами. Плата может быть использована энтузиастами для стабилизации полёта самодельных ракет. Наработки проекта распространяются под лицензией GPLv3. Доступны схемы, макет печатной платы и спецификация для симулятора EasyEDA (Electronic Design Automation).
Плата полностью совместима со средами разработки Arduino IDE и Platformio. Программные компоненты написаны на C++. В качестве основы задействован микроконтроллер SAMD51, работающий на частоте 120 MHz и имеющий 1МБ встроенной Flash-памяти. Для записи телеметрии во время полёта может применяться внешний Flash или SD-карта. Передача данных и команд осуществляется через Bluetooth Low Energy (BLE), что позволяет использовать обычный смартфон для управления.
Предоставляется три канала управления сервоприводами — два для движения сопла при изменении вектора тяги и один для других систем, например, для активации раскрытия парашюта. Также имеется два пироканала для зажигания и свечей накала, и канал управления электродвигетелем для изменения крена при помощи центробежного колеса. Для питания могут использоваться LiPo-аккумуляторы 2S или 3S. Среди применяемых датчиков: шестиосевой гидростабилизатор (IMU BOSCH BMI088) и высотомер (MS560702). Для подключения дополнительных датчиков, таких как GPS-модуль, имеются коннекторы UART и I2C.

Источник: http://www.opennet.ru/opennews/art.shtml? num=54327
© OpenNet
