Новая технология позволяет роботам уклоняться от столкновения с людьми. Вот как это работает

Сегодня роботы по большей части корректируют тракторию очень поздно, при этом не принимая в расчет действия людей. С новой системой все это может измениться
Стоит сказать, что и нам самим нередко не удается избежать столкновения с другими людьми. Происходит это во многом из-за того, что наш мозг не может адекватно предсказать действия других людей и траекторию их движения. Что уж говорить о роботах, которые также нередко попадаются нам под ноги и не могут так быстро реагировать на такое сложное динамическое препятствие, как человек.
Как роботы избегают столкновения с людьми
Исследователи из Университета Торонто придумали, как сделать так, чтобы робот мог эффективно обходить людей в процессе передвижения. Эта система становится все более актуальной по мере того как на улицах начинают появляться роботы-доставщики, а в домах у нас селятся роботы-пылесосы и другие роботизированные помощники по дому.
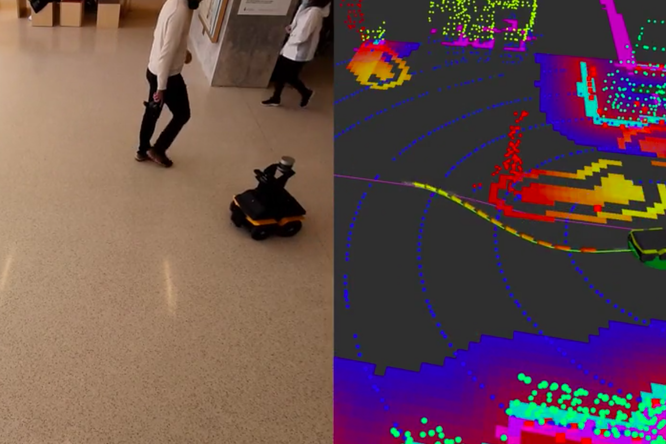
Чтобы решить, куда двигаться, робот использует пространственно-временные сетчатые карты занятости (SOGM). Это 3D-карты в сетку, каждая двумерная ячейка которых содержит прогнозируемую информацию об активности в этом пространстве в определенное время. Робот выбирает свои будущие действия, обрабатывая эти карты с помощью алгоритмов планирования траектории.
Еще одним ключевым инструментом, который ученые использовали в своей технологии, являются лидары. Это технология дистанционного зондирования, похожая на радар, за исключением того, что она использует для определения положения объекта свет вместо звука. Каждый проход лидара создает точку, хранящуюся в памяти робота. Затем, анализируя положение точек, робот может определять положение динамического препятствия, на основе чего затем предсказывать его перемещение.
Сеть SOGM команды в настоящее время способна распознавать четыре категории лидарных точек: землю; постоянные препятствия, такие как стены; вещи, которые могут изменить свое местоположение, но не двигаются сами, такие как стулья и столы; и динамические препятствия, такие как люди. При этом на данном этапе роботу уже не требуется ручная маркировка точек.
