Китайские специалисты создали электронный аналог человеческой кожи
Кожа человека покрыта густой сетью клеток, механорецепторами — окончаниями чувствительных нервных волокон. Они расположены в трех измерениях, что позволяет людям с исключительной точностью различать такие ощущения, такие как давление, сдвиг (трение) и деформация. Существующие на данный момент технологии «электронной кожи» не оправдывают себя и не в состоянии воспроизвести это сложное и тонкое человеческое восприятие на физическом уровне.
Однако исследовательская группа профессора Чжан Ихуэя из Университета Цинхуа, вдохновившись великолепием природы человеческой кожи, разработала новый дизайн электронной оболочки. Он включает в себя трехмерную архитектуру — конструкция имитирует пространственное распределение механорецепторов, обнаруженных в коже человека, таких как клетки Меркеля и тельца Руффини. В результате получилось устройство, способное независимо измерять давление, трение и деформацию на физическом уровне. Это значительный скачок вперед в технологии искусственного осязания.
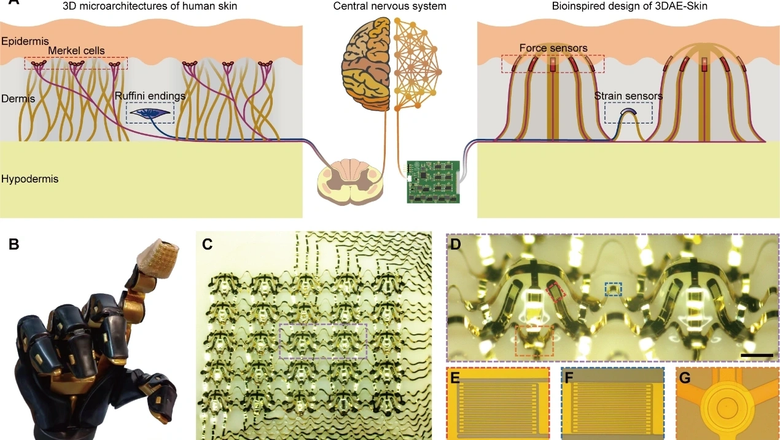
Разработанная бионическая «электронная кожа» состоит из трех отдельных слоев, повторяющих структуру кожи человека:
- Эпидермис: самый верхний слой, напоминающий текстуру поверхности человеческой кожи;
- Дерма: средний слой, в котором расположено большинство датчиков и рецепторов. Он имеет уникальную восьмиплечную каркасную конструкцию, в которой находится блок измерения усилия. Это высокочувствительное устройство расположено близко к поверхности, поэтому эффективно обнаруживает внешние воздействия;
- Подкожная клетчатка: нижний слой, повторяющий текстуру нижележащих тканей кожи человека.
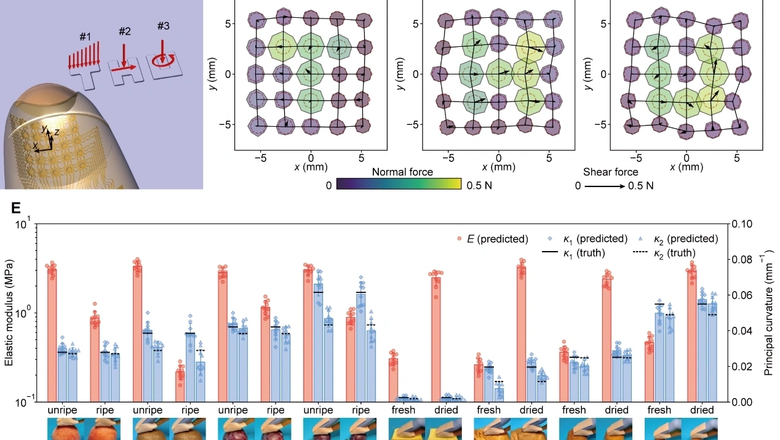
Объединив трехмерную электронную оболочку с передовыми алгоритмами глубокого машинного обучения, исследовательская группа достигла впечатляющего результата. Разработка может не только воспринимать прикосновения, но и анализировать модуль упругости (жесткость) объекта и локальную основную кривизну (форму) посредством простого контакта. Труды ученых уже опубликовали в престижном научном журнале Science 30 мая 2024 года. Разработка обладает огромным потенциалом для различного применения, включая протезирование, обеспечивающее более естественное осязание предметов для людей с ампутированными конечностями, и роботов с расширенными тактильными возможностями.
