Voyage представила собственную систему экстренного торможения для беспилотных автомобилей
Калифорнийский разработчик беспилотных автомобилей Voyage представила собственную систему экстренного торможения под названием SafeStop. Сама по себе SafeStop не является революционной, но она лучше существующих AEB-систем, поскольку опирается на большее количество высокоточных сенсоров и более продвинутые алгоритмы.
Причины появления
Зачем было создавать SafeStop? Для любой safety-critical системы необходимо множество слоев отказоустойчивости для снижения риска аварии с летальным исходом. SafeStop является одним из дополнительных слоев, призванных не допустить столкновения с критическими объектами (например, пешеход, велосипедист, автомобиль).


Если вы изучите текущие системы экстренного автоматического торможения (AEB), присутствующие в современных автомобилях, то заметите что подобные системы реагируют когда столкновение неизбежно, вместо планомерного предотвращения аварии. Такой подход обусловлен автомобильными сенсорами низкой точности, а также последствиями резкого торможения на большой скорости в случае ложно-позитивного сценария. А AEB-система, спроектированная изначально для беспилотного автомобиля, с дополнительными сенсорами и совершенными алгоритмами сможет обеспечить более высокий уровень безопасности.
Как SafeStop работает
SafeStop опирается на три составляющих:
- Automotive-grade вычисления
- Надежные сенсоры и perception-алгоритмы
- Строгие методы тестирования и валидации
Automotive-Grade вычисления
В том время как главные алгоритмы компьютерного зрения беспилотного автомобиля работают на основном компьютерном кластере с резервированием, SafeStop функционирует на отдельном NVIDIA Drive AGX и отдельном источнике питания.
Drive AGX AI удовлетворяет automotive-grade спецификациям (ISO 26262/ASIL-D, ISO/PAS 21448), обеспечивая требуемую для safety-critical систем надежность. Да и по мощности вычисления это решение превосходит любое существующее AEB-решение. NVIDIA Xavier SoC обладает производительностью в 30 TOPS, потребляя всего 30 ватт.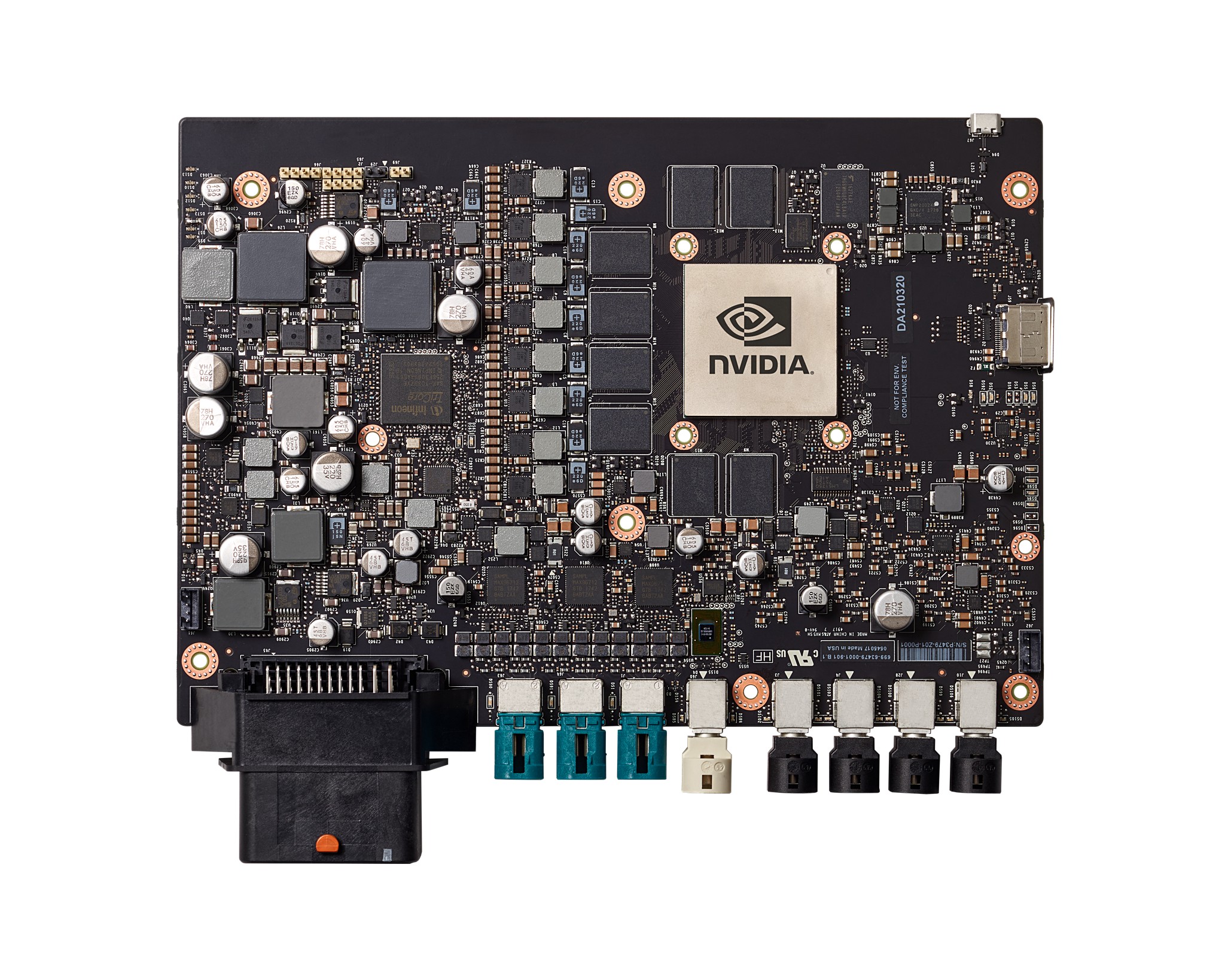
Надежные сенсоры и perception-алгоритмы
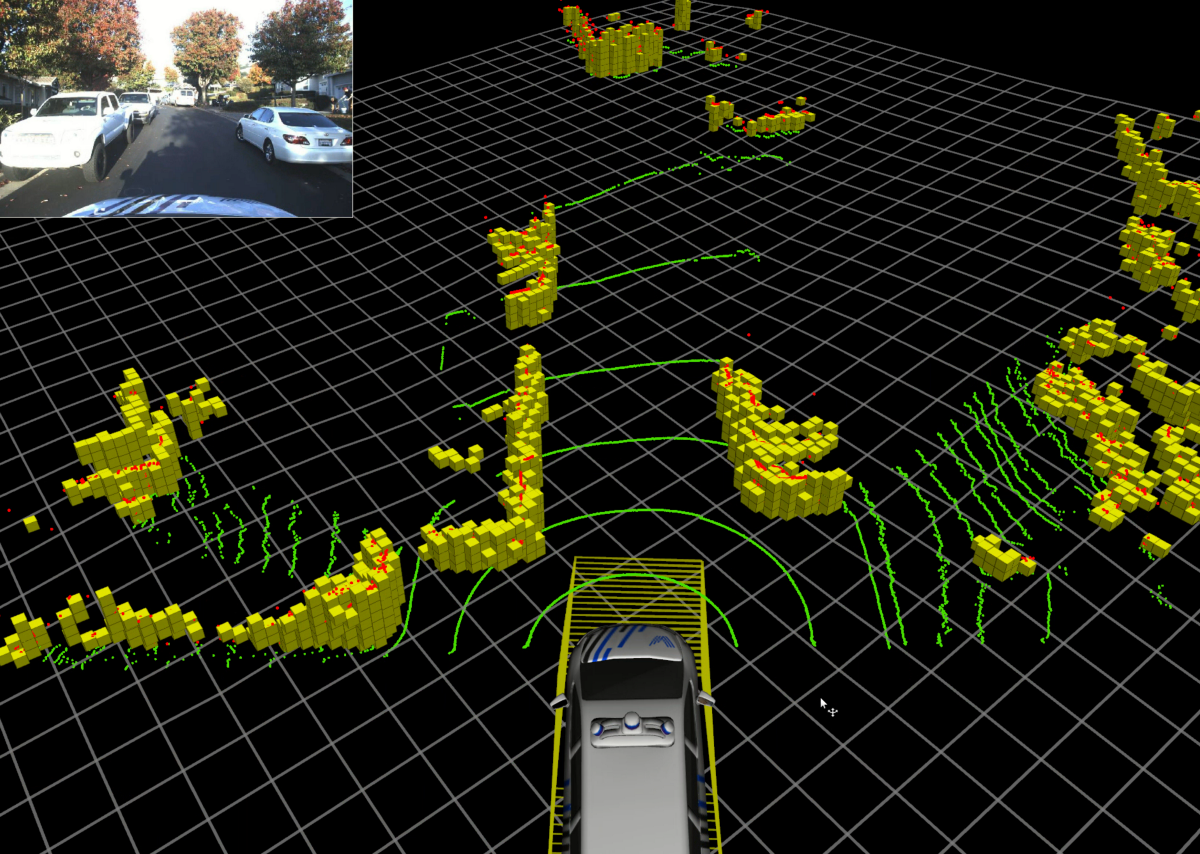
Задача SafeStop проста: всегда обнаруживать критические объекты впереди автомобиля и тормозить, если необходимо. Несмотря на простоту формулировки, это очень сложная задача, требующая качественных алгоритмов и надежного оборудования.
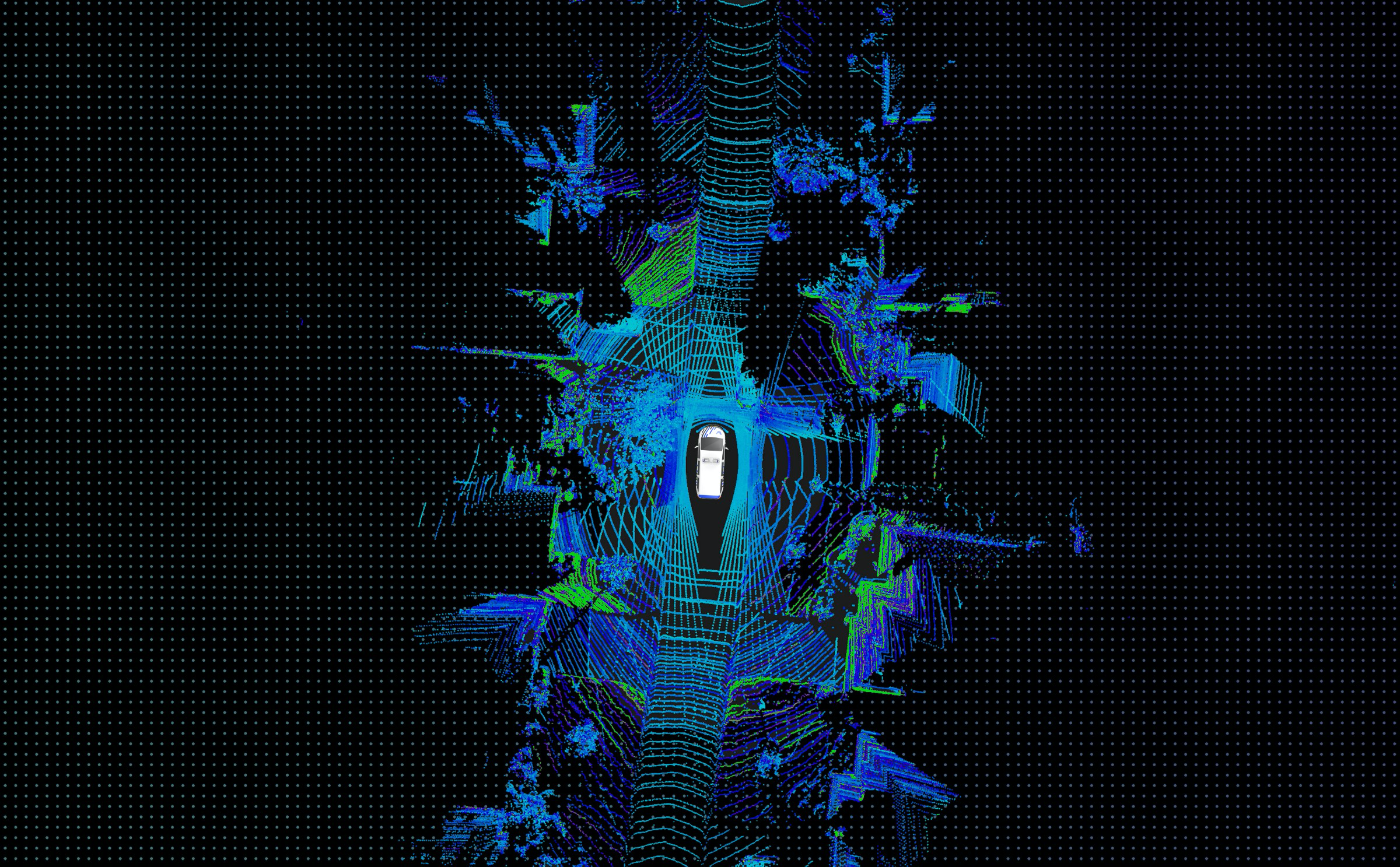
Для этого впереди автомобиля разместился высокоточный лидар Velodyne Ultra Puck VLP-32C, способный работать днем и ночью и в определенных погодных условиях.

32-лучевой лидар обеспечивает большую плотность точек, достаточную для точной классификации объектов впереди. Однако, с таким низким расположением сенсора появляется интересная задача для алгоритмов: точно выделять все объекты, отличные от дорожного полотна.
Важно отметить, что SafeStop никак не использует HD-карты. Хоть и для навигации беспилотники Voyage их используют, в такой критической системе как AEB небезопасно полагаться на HD-карты, которые могут устареть на неделю или месяц.
Строгие методы тестирования и валидации
Как и любой критический компонент, оборудование и софт SafeStop тестируются множеством комбинаций параметров, таких как скорость, ускорение, угол поворота, изменение высоты, влажность дороги и время суток. Также система тестируется со множеством вариаций очень больших и очень маленьких объектов, как статических, так и двигающихся.
Также тестовые сценарии SafeStop, проводимые на закрытых полигонах, спроектированы с учетом отказов всех возможных подсистем, чтобы удостовериться что SafeStop сможет корректно отработать в самых плохих сценариях. Подобные тесты призваны подтвердить, что система способна корректно определить и отреагировать на любую неисправность сенсора, провода или программного обеспечения за ожидаемый отрезок времени.
В дополнение к стресс-тестам ежедневно поступают данные с беспилотного автопарка G2 (текущая модель беспилотников Voyage). Все эти огромные массивы данных используются для более точной калибровки системы.
В данный момент SafeStop еще активно тестируется и дорабатывается для соответствия жестким стандартам automotive-grade, однако, на первый взгляд кажется что она действительно лучше:
- скорость реакции выше
- лидар лучше обнаруживает объекты чем радар (и опционально камера)
- система реагирует на большее количество препятствий, благодаря более лучшей детекции и классификации
