Вдохновение в недрах: робот, имитирующий корни

Создатели робототехники, будь то ученые или же писатели-фантасты, часто вдохновляются представителями фауны, в том числе и человеком. В результате появляются человекоподобные андроиды, роботизированные рыбы, птицы и даже насекомые. Однако мало кто обращает внимание на не менее богатое и разнообразное царство, на растения. Эти удивительные организмы адаптировались к произрастанию в самых разных условиях, от дождливых тропиков до засушливых пустынь, от океанических глубин до горных склонов, от непроходимых лесов до горшочков на подоконнике. Вполне логично, что инженерам-робототехникам есть чем вдохновится. И вот ученые из Миннесотского университета (США) разработали новый тип гибкого робота, который имитирует рост корней растения. Из чего состоит робот, чем он похож на корни, и на что способен? Ответы на эти вопросы мы найдем в докладе ученых.
Основа исследования
Между растениями, грибами и водорослями есть нечто общее, а именно метод взаимодействия с окружающей средой, называемый кончиковым ростом*.
Кончиковый рост (рост через кончик)* — форма поляризованного роста живых клеток, которая приводит к морфологии удлиненной цилиндрической клетки с закругленным кончиком, на котором происходит ростовая активность.
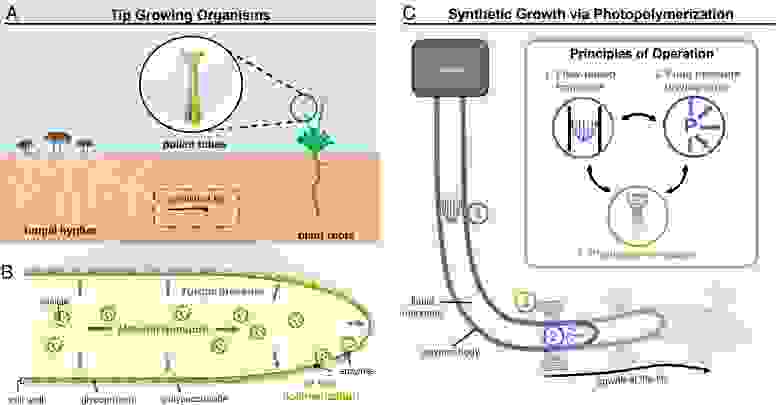
Изображение №1
Примерами такого роста являются корни растений, пыльцевые трубки и даже гифы грибов. Простыми словами говоря, этот рост обусловлен удлинением с конца объекта (допустим, корня), а не от его основания. В ходе кончикового роста происходит анизотропное добавление нового материала на растущий конец тела, при этом только кончик движется относительно окружающей среды (1А). Этот локальный рост значительно снижает сопротивление окружающей среды и позволяет быстро реагировать на ее переменчивые условия. Следовательно, организмы, реализующие кончиковый рост, способны со временем создавать большие и сложные структуры, перемещаться по ограниченным средам (например, в почве) и ориентироваться в соответствии с внешними раздражителями (свет, химические градиенты или механический импеданс).
Учитывая, что природа является одним из самых богатых источников вдохновения для ученых и инженеров, многие материалы и системы в той или иной степени создавались с оглядкой на то, как это делается в природе. Кончиковый рост не стал изгоем в научном сообществе, а потому были попытки имплементировать подобный механизм роста в роботизированные системы.
В одном из предыдущих исследований ученые уже пытались имитировать рост корней с помощью выворачивания под давлением тонкой полимерной пленки или процесса аддитивного производства на основе нити. Проблема в том, что эти методы полагаются на непрерывную подачу строительного материала в твердом состоянии, что приводит к быстрому увеличению внутреннего трения во время роста на извилистых путях и, как следствие, к ограничению конечного расширения. А потому концепция кончикового роста в полной мере пока не была реализована с инженерной точки зрения.
Ученые отмечают, что механизмы роста кончиков в грибных гифах, корнях и пыльцевых трубках характеризуются несколькими основными принципами (1А и 1В).
Первый принцип заключается в том, что основной движущей силой роста является давление жидкости. Считается, что это давление возникает из-за внутреннего тургорного давления* внутри клеток, которое создается осмотическим потенциалом между заполненной жидкостью клеткой и окружающей ее средой. Поскольку внутреннее давление деформирует растяжимые клеточные стенки, их избирательная деформация на кончике способствует росту.
Тургор тканей* — напряженное состояние оболочек живых клеток.Тургорное давление* — внутреннее давление, которое развивается в растительной клетке, когда в нее в результате осмоса входит вода, а цитоплазма прижимается к клеточной стенке. Это давление препятствует дальнейшему проникновению воды в клетку.
Второй принцип заключается в том, что рост происходит за счет локализованного синтеза клеточной стенки. Компоненты клеточной стенки, а именно полисахариды, такие как хитин в грибах, целлюлоза в водорослях и растениях и гликопротеины, полимеризуются на кончике для локального построения твердой структуры.
Третий принцип представляет собой транспорт материала с помощью жидкости, при котором компоненты клеточной стенки транспортируются к кончику как потоковыми, так и активными средствами (такими как везикулярный транспорт через цитоскелет).
Комбинация этих трех принципов позволяет организмам генерировать большие силы и удлиняться на кончике с минимальным трением с окружающей средой.
Следовательно, дабы создать искусственный эквивалент кончикового роста, необходимо попытаться воссоздать эти три принципа. В частности, фотополимеризация предлагает уникальный подход к локальному наращиванию твердой структуры, которая играет центральную роль в росте кончика. Фотополимеризация позволяет создавать трехмерные полимерные объекты из жидкой смолы с пространственным и временным контролем над механическими и химическими свойствами полученных объектов.
Для синтетического кончикового роста фотополимеризация обеспечивает локальную и быструю полимеризацию структуры, в то время как поток под давлением используется для подачи жидкого раствора мономера к месту фотополимеризации на кончике, тем самым стимулируя рост (1C).
Результаты исследования

Изображение №2
Учеными был создан метод (2A), в котором текущий раствор мономера, ограниченный в стационарном прозрачном канале, селективно фотополимеризуется в твердую сшитую сеть в освещенной области. Отвержденный полимер полностью заполняет канал и вытесняется поступающим раствором мономера под действием давления жидкости.
Для используемого мономера был выбран состав на основе тиолена из-за его быстрой кинетики отверждения, низкого ингибирования кислорода, низкой усадки и коммерческой доступности.
Как отмечают ученые, основная проблема этого процесса заключается в преодолении сил трения и адгезии, возникающих в результате взаимодействия канала с полимером, что позволило бы достичь непрерывной экструзии.
Адгезия возникает в основном за счет химической связи и физического сцепления между полимером и стеклянной стенкой канала. Преодолеть это препятствие помог фторсилановый антиадгезив, нанесенный на поверхность стеклянного канала, так как он снижает адгезию и улучшает антиадгезионные свойства стекла, что значительно снижает поверхностную энергию стекла.
Однако для успешной экструзии лишь этого дополнения было недостаточно. Ранее было показано, что проблему адгезии можно решить путем введения нереакционноспособного слоя между смолой и твердым интерфейсом либо за счет ингибирования полимеризации, либо за счет использования несмешиваемой жидкости.
Учитывая эти знания, ученые решили добавить амфифильный блок-сополимер PDMS-PEO, содержащий примерно 65% поли (этиленоксида) по весу, в раствор мономера в качестве смазочного компонента. За счет этого была достигнута экструзия твердого фотополимеризованного полимера (2B и 2C). Благодаря наличию блок-сополимера в объемном растворе мономера смазочный слой образуется непрерывно и пополняется в процессе экструзии. Если же смазочный материал добавлять не в состав мономера, а на стенки канала, то он рано или поздно закончился бы, а экструзия прекратилась бы. А так слой смазки постоянно пополняется за счет самого мономера, от чего экструзия протекает непрерывно.
Учитывая вышесказанные улучшения, ученые решили назвать свой метод экструзии E-SLIP (extrusion by self-lubricated interface photopolymerization), т. е. Экструзия за счет самосмазываемого фотополимеризованного интерфейса.
Процесс E-SLIP был реализован в установке кольцевого канала (2B и видео №1). Растворы мономеров, приготовленные с различными концентрациями PDMS-PEO, экструдировали при постоянной скорости потока. Давление жидкости измерялось параллельно экструзии (2C), чтобы исследовать адгезию и трение на интерфейсе канал-полимер.
Видео №1
Давление жидкости было естественной переменной для мониторинга из-за характера экструзии с регулируемым расходом и того факта, что давление жидкости, вероятно, чувствительно к изменениям скорости потока, а также к трению между каналом и полимером. Давление жидкости оставалось постоянным до включения ультрафиолетового светодиодного освещения. А вот после включения освещения давление быстро увеличивалось из-за начального статического трения между первоначально сформированным твердым фотополимером и каналом.
В случае экструзии с 20 масс.% PDMS-PEO в растворе мономера давление жидкости снижалось до стационарного значения, поскольку отвержденная фотополимерная трубка выходила из канала вместе с полностью сформированным смазочным слоем (толщина ∼30–45 мкм) на интерфейсе. Если же в растворе не было PDMS-PEO, то смазочный слой отсутствовал, из-за чего экструзия была невозможна, а давление жидкости нарастало до выхода из строя устройства.
За счет увеличения содержания PDMS-PEO в растворе мономера стационарное давление экструзии было существенно снижено (2D), а предполагаемая толщина (Llubricant) смазочного слоя увеличивалась. Чем больше PDMS-PEO было в растворе, тем сильнее был эффект смазочного слоя, от чего снижалось давление экструзии. Потому было важно установить точную концентрацию PDMS-PEO, чтобы сохранить непрерывность экструзии, но и не привести к проскальзыванию трубки.
Авторы разработки отмечают, что E-SLIP, используя жидкий мономер с низкой вязкостью (∼50 мПа·с) и самосмазывающийся интерфейс, работает при низких давлениях (∼10 кПа) и не нуждается в дорогом и сложном оборудовании. За счет ограничения затвердевания внутри канала и использования малоусадочных смол была достигнута превосходная точность размеров геометрии канала, при этом окончательная форма определялась геометрией канала.
Неотъемлемым преимуществом фотополимеризации как метода формирования твердой структуры является возможность создания деталей с широким диапазоном физических и механических свойств путем настройки их химии. К примеру, E-SLIP может изготавливать прочные детали (2E) с модулем упругости от 7 до 570 Мпа просто за счет модуляции молярного отношения двух акрилатных компонентов в растворе мономера.

Изображение №3
Взяв за основу E-SLIP, ученые создали мягкого растущего робота (3A), который реализует все вышеописанные принципы механизма роста кончиков, присущие растениям. Удлинение робота инициируется короткой полимерной трубкой (около 5 см), предварительно экструдированной с помощью E-SLIP в установке, показанной на 2А. Эта трубка служит начальным каналом для доставки раствора мономера к голове робота, что соответствует принципу транспорта жидкости в биологических системах. В голове робота поток мономера проходит через кольцевой канал и набор периферийных УФ-светодиодов для локальной фотополимеризации, аналогичной локальному синтезу клеточной стенки. Давление жидкости толкает голову робота вперед, обеспечивая непрерывное формирование конструкции корпуса робота, что отражает движущую силу, основанную на тургорном давлении, в биологических системах. После формирования фотополимеризованное тело остается статичным по отношению к своему окружению, и только голова робота движется относительно окружающей среды (3В).
Видео №2
Для установления характеристик роста робота проводилось непрерывное измерение давления жидкости. Давление увеличивалось линейно со скоростью наконечника робота, которая прямо пропорциональна расходу жидкого мономера, при этом минимальное давление экстраполировалось до нулевой скорости (3C). Наблюдаемая положительная линейная зависимость давления экструзии от скорости характерна для гидродинамического трения, возникающего из-за слоя смазки между ограничивающим каналом и затвердевшим полимером. Другими словами, основная часть отношения давления к росту может быть связана с преодолением трения на границе раздела, а не с падением давления из-за прохождения потока жидкости через тело и голову робота. Минимальное давление обусловлено силами сопротивления, которые преодолеваются при росте: внутреннее трение между полимеризованной трубкой и стенками канала и внешнее сопротивление между головой робота и окружающей средой. При этом внутреннее трение может быть уменьшено за счет увеличения концентрации PDMS-PEO.
При переключении направления роста с горизонтального на вертикальное наблюдалось смещение вверх зависимости давление-скорость, связанное с увеличением внешнего сопротивления из-за массы головы робота (∼15 г). Автономный вертикальный рост возможен лишь до момента достижения роботом определенной длины, ввиду гибкости используемого материала. Во время вертикального роста трубка начинает изгибаться, но рост не останавливается.
Ученые отмечают, что скорость головы робота и давление жидкости являются ключевыми параметрами, определяющими поведение тестируемого робота. Рост робота ограничен давлением и скоростью в трех аспектах:
- минимальное стационарное давление, необходимое для преодоления внутренних и внешних сил сопротивления;
- максимальное давление, определяемое давлением на разрыв корпуса робота;
- максимальная скорость, определяемая фотополимеризационной кинетикой раствора мономера.
Эти аспекты определяются и моделируются посредством изменения различных рабочих параметров (3D), таких как интенсивность света, выбранный химический состав и геометрия робота. Стоит отметить, что между давлением на разрыв робота и необходимым рабочим давлением существует большой диапазон. Следовательно, такой робот сможет эффективно расти в условиях с высоким импедансом (например, в рыхлой почве), когда более высокое рабочее давление необходимо. Рост возможен при условии, что давление, необходимое для роста, не превышает давления разрыва образующейся трубки. Если предположить, что увеличение отношения давление/рост происходит исключительно за счет увеличения длины и связанного с этим увеличения перепада давления из-за потока жидкости, то можно рассчитать предел длины. В результате было установлено, что потенциальная максимальная длина робота составляет 3800 м, если используется гибкий материал.

Изображение №4
Тестируемый робот, как и многие биологические системы, показал возможность пассивной навигации. Робот, оснащенный конусным наконечником, может пассивно обходить препятствия и достигать желаемого пункта назначения по ограниченному пути (4А и видео №3).
Видео №3
Эта способность происходит от присущей роботу податливости, которая позволяет ему приспосабливаться к окружающей среде и следовать по пути наименьшего сопротивления.
Далее ученые проверили, как будет вести себя робот в среде, напоминающей рыхлую почву, т. е. в среде с высоким импедансом. В этом опыте робот также продемонстрировал поведение, присущее корневой системе растений (4B и видео №4).
Видео №4
Было замечено, что изменения давления жидкости соответствуют взаимодействию робота с окружающей средой: установившееся давление для беспрепятственного горизонтального роста, возрастающее давление при входе в грунт, постоянное давление при рытье с полностью погруженной в грунт головой и снижающееся давление на выходе из грунта.
Как отмечают ученые, живые организмы способны перемещаться по длинным извилистым путям без особого труда. Однако мягкие роботы, которые тестировались в прошлом, этого не могли. Основная причина заключалась в том, что у них отсутствовала система подачи строительного материала за счет давление жидкости. Ранее разработанные растущие роботы буквально тянули за собой твердотельные линии снабжения, обеспечивающие их материалом для продолжения роста. По мере того как роботы росли по извилистым путям, сила, необходимая для перетаскивания этих твердотельных элементов конструкции, увеличивалась в геометрической прогрессии.
Тем не менее в тестируемом роботе, который использует давление жидкости в качестве основного механизма подачи строительного материала, подобных проблем не наблюдалось (видео №5).
Видео №5
Во время тестирования роста робота в извилистом пути наблюдалось незначительное изменение рабочего давления в зависимости от длины робота (конечная длина составила около 1.5 м) по сравнению с прямым путем (4C). Но, несмотря на это, робот продолжал рост, тем самым демонстрируя еще одно преимущество перед подобными роботами прошлого поколения.
Для более детального ознакомления с нюансами исследования рекомендую заглянуть в доклад ученых и дополнительные материалы к нему.
Эпилог
В рассмотренном нами сегодня труде ученые обратились за вдохновением к самому богатому источнику — к природе. Растения и грибы растут, реализуя механизм добавления нового материала к кончику произрастающего корня или побега. Этот механизм был взят учеными за основу для создания мягкого робота, который способен расти.
Ранее уже были вполне успешные попытки создать подобных роботов, но они обладали рядом недостатков. К примеру, чтобы расти и тем самым продолжать движение вперед, робот должен был тащить за собой твердотельные компоненты конструкции, которые использовали тепло или давление для выработки нового строительного материала. Подобный прицеп не позволяет таким роботам преодолевать извилистые пути или проходить сквозь среду с повышенным импедансом (например, почву).
Решение этой проблемы нашлось в корнях. Растения используют воду для транспортировки строительного материала, который преобразуется в твердые корни по мере роста. Ученые воссоздали этот процесс с помощью фотополимеризации, которая использует свет для преобразования жидких мономеров в твердый материал. Таким образом новый материал подается в самом начале робота (грубо говоря, в хвосте), при этом установка подачи остается на месте. Из твердой трубки непрерывно выходит новый материал, проходящий фотополимеризацию и формирующий тело робота, который остается достаточно гибким, а потому способен продвигаться вперед по извилистому пути без особого труда.
Описанный в исследовании метод экструзии может быть крайне полезен не только для разработки новых типов мягкой робототехники, но и для производства, так как он не нуждается в дорогих компонентах и крайне прост в реализации.
Немного рекламы
Спасибо, что остаётесь с нами. Вам нравятся наши статьи? Хотите видеть больше интересных материалов? Поддержите нас, оформив заказ или порекомендовав знакомым, облачные VPS для разработчиков от $4.99, уникальный аналог entry-level серверов, который был придуман нами для Вас: Вся правда о VPS (KVM) E5–2697 v3 (6 Cores) 10GB DDR4 480GB SSD 1Gbps от $19 или как правильно делить сервер? (доступны варианты с RAID1 и RAID10, до 24 ядер и до 40GB DDR4).
Dell R730xd в 2 раза дешевле в дата-центре Maincubes Tier IV в Амстердаме? Только у нас 2 х Intel TetraDeca-Core Xeon 2x E5–2697v3 2.6GHz 14C 64GB DDR4 4×960GB SSD 1Gbps 100 ТВ от $199 в Нидерландах! Dell R420 — 2x E5–2430 2.2Ghz 6C 128GB DDR3 2×960GB SSD 1Gbps 100TB — от $99! Читайте о том Как построить инфраструктуру корп. класса c применением серверов Dell R730xd Е5–2650 v4 стоимостью 9000 евро за копейки?
