Утко-робот мутит воду на рисовых полях

Инженер компании Nissan сделал робота, который перемешивает слои воды на рисовых плантациях, снижая ее прозрачность, чтобы растущие там сорняки получали меньше солнечного света.
Проблема.
Обширные площади полей с зерновыми культурами нужно все время защищать от сорняков и вредителей, а также создавать непригодные условия для их роста, стараясь минимально влиять на сам урожай.
Что делают в стандартном случае, если уже есть засеянное поле — просто обрабатывают его участки гербицидами.
Но если у нас рисовое поле, которое залито слоем воды, то для борьбы с сорняками можно попытаться понизить прозрачность воды на разных участках поля, чтобы до дна доходило меньше света, таким образом можно уменьшить скорость роста сорняков.


Для этих целей даже используют специальные красители, но их концентрацию и распыление нужно все время отслеживать, измерять и варьировать, согласно погодным условиям.
А когда таких площадей с урожаем много, и они небольшие по размеру, то такое решение с распылением химикатов и красителями очень трудно реализовать полностью на всей территории посева.


Инженерное решение.
Нужно было найти более простой и легкий способ решения задачи по борьбе с сорняками при небольшом уровне воды на поле.
Тем более, когда нужно следить за состоянием более сотни небольших полей с ростками риса. А под рукой есть только солнышко, беспроводные коммуникации и один домик для обслуживающего персонала.
И вот один японский инженер Тацуя Накамура решил эту задачу очень элегантно!

После всходов рисовые поля заливают и не сильно большой слой воды оставляют во время кущения — примерно 5 см. Затем понемногу слой воды увеличивают до 15 см, и на этом уровне вода находится до восковой спелости растений.
Оказывается, в Азии фермеры на протяжении веков использовали уток для борьбы с сорняками на рисовых полях. Также водоплавающие птицы поедали насекомых, а их помет служил естественным удобрением. Сейчас эта практика уже мало распространена.
А что, если использовать механический способ (с помощью небольшого водоплавающего робота) для смешивания слоев воды в поле, то есть, просто ее перемешивать, как гуси лапками, например, но более щадяще для нежных ростков самого урожая.
Ведь для реализации такого устройства не нужно изобретать что-то сложное — все есть под рукой.
Вот так и возникла идея о доработки концепции робота-пылесоса в утко-робота по имени Айгамо (The Aigamo), который поможет бороться с сорняками.
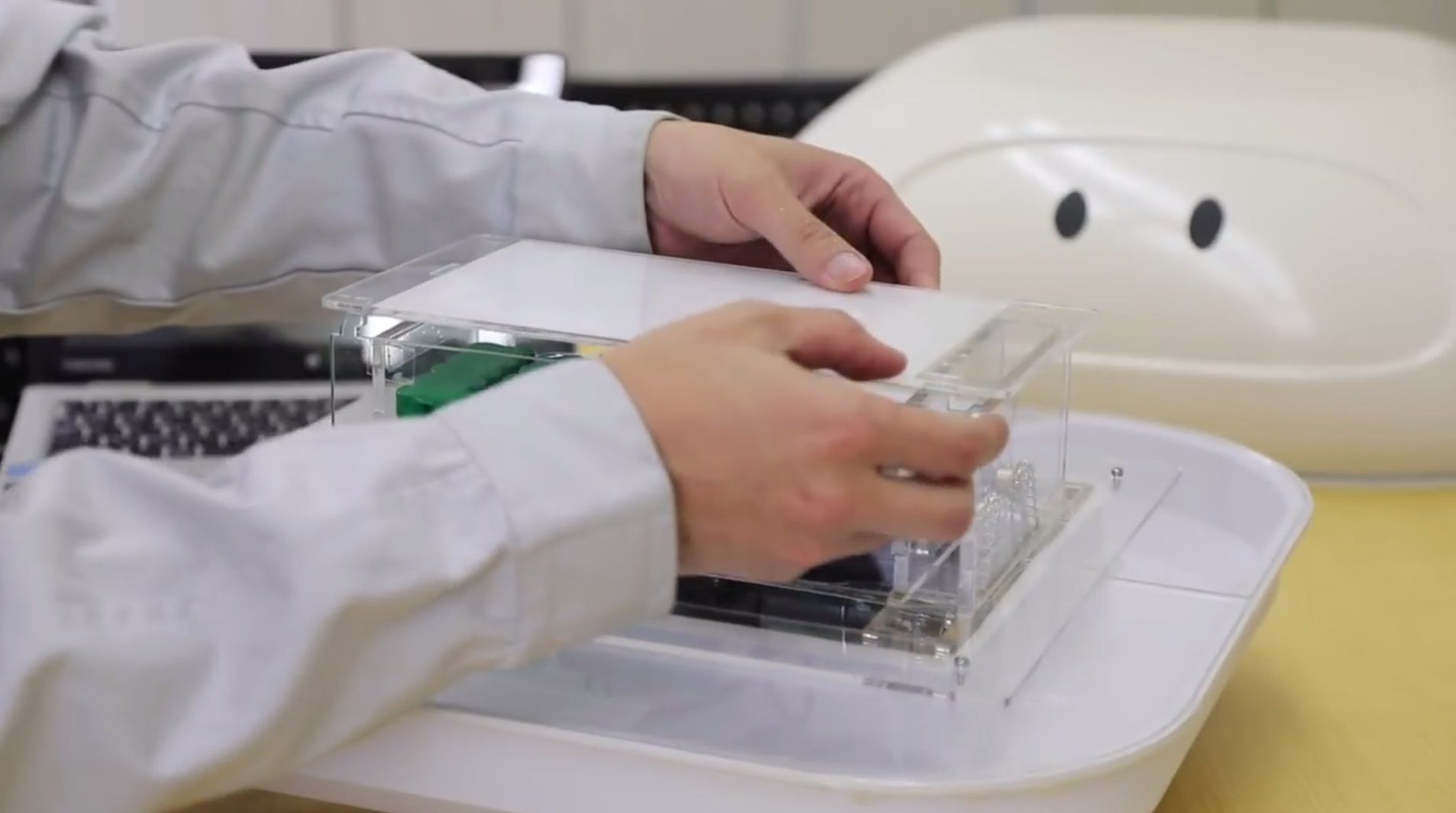
Внешний вид утко-робота в поле:

Причем корпус утко-робота сделан так, чтобы не наносить повреждеия рисовым росткам:



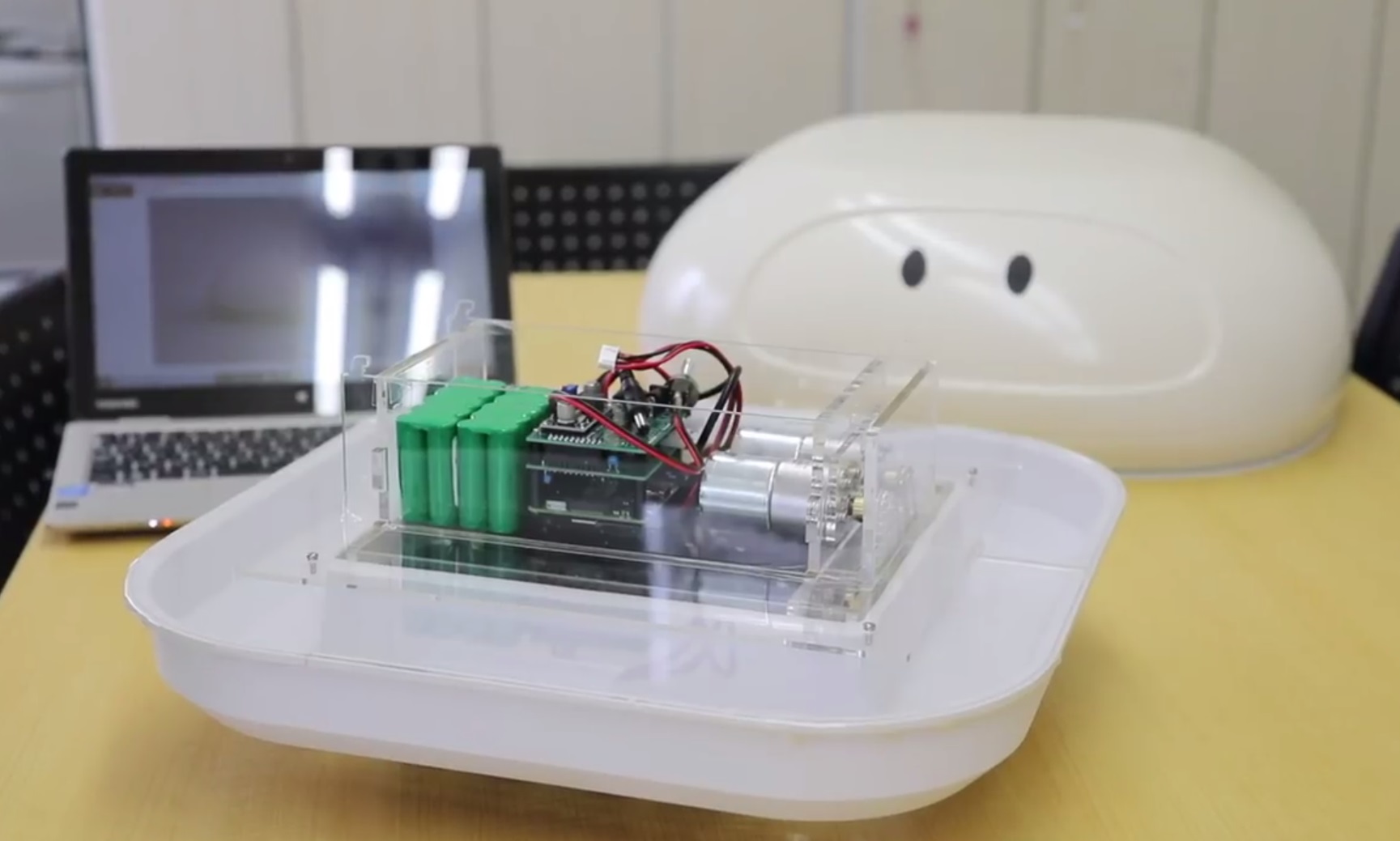
Характеристики утко-робота:
— пластиковый корпус с защитой от попадания воды, цвет белый для идентификации издалека;
— вес 1500 грамм с АКБ;
— размер: квадрат 60×60 см (как плитка фальшпола стандартного);
— встроенная система управления с GPS-приемником, Wi-Fi;
— бортовая видеокамера (в одном из глаз на корпусе);
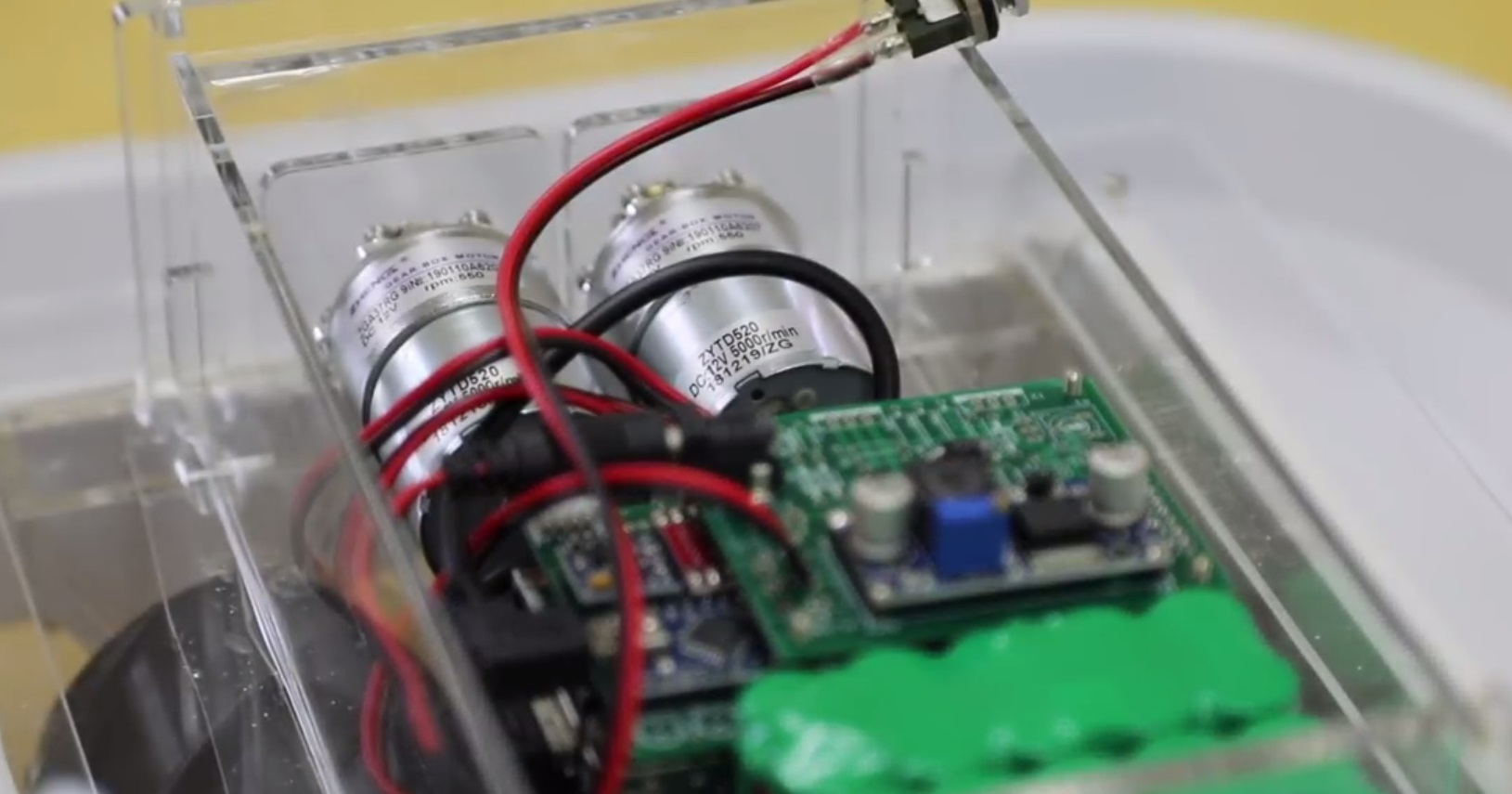
— два 12-ти вольтовых сервопривода с редукторными двигателями;
— в качестве винтов для управления движением робота по воде используются два шнека, с помощью которых происходит так же и перемешивание слоев воды (кроме того, такие движения утко-робота еще и насыщают воду кислородом);
— отдельная зарядная станция (используются солнечные панели).
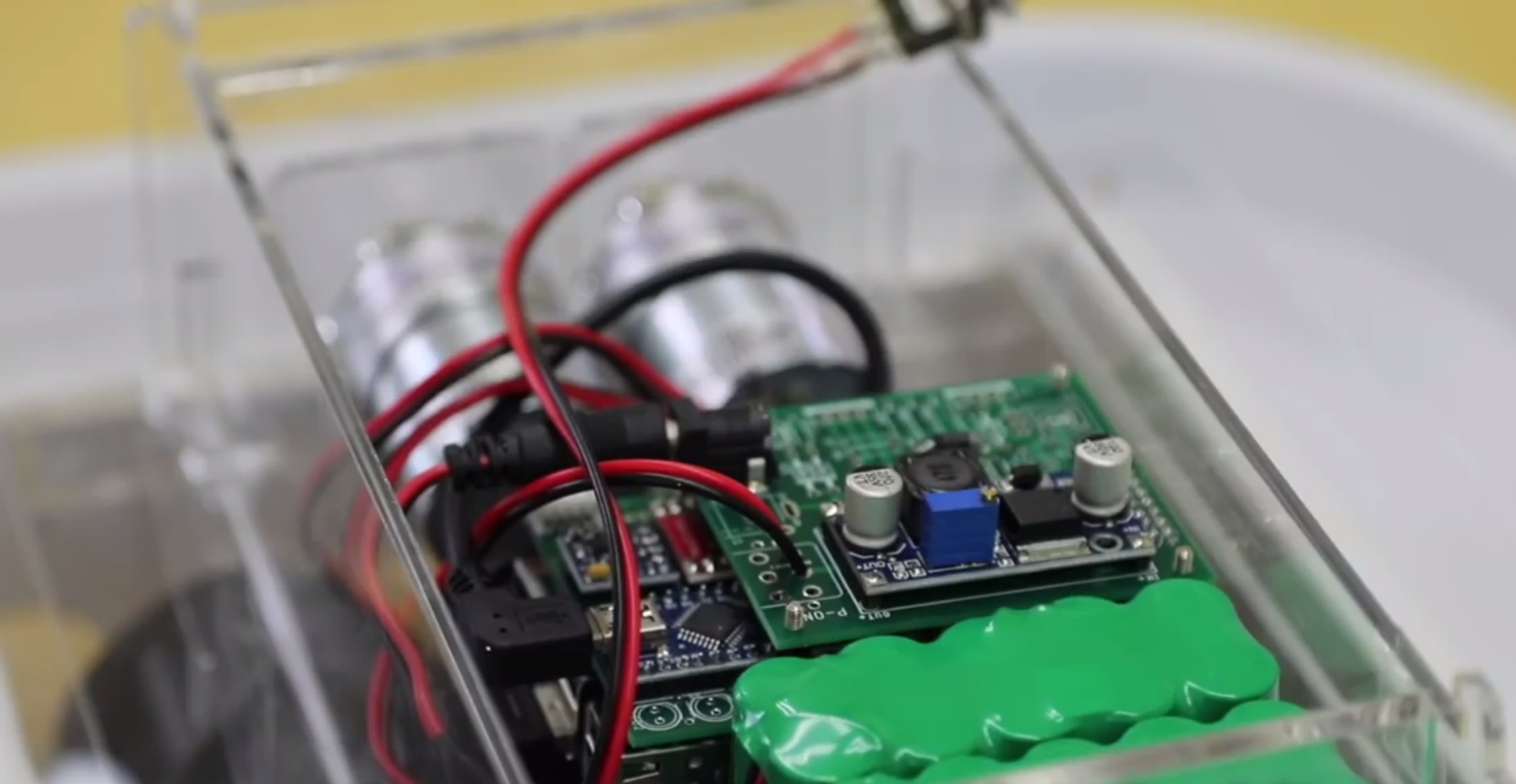
Компоненты утко-робота:




Зарядное устройство и его сборка:




На данный момент проходят испытания нескольких опытных образцов утко-робота на рисовых полях в префектуре Ямагата.









Если они еще туда летающих дронов в эту систему подключат для переноски утко-роботов в соседние поля и обслуживания, минимизируя работу оператора (застрял утко-робот на мели — не нужно идти человеку туда, например), то будет очень интересно, полезно и вкусно.

