Установка FreeRTOS для Stm32vlDiscovery
Доброго времени суток.
Разбираясь с программированием микроконтроллеров Stm32, решил попробовать установить (операционную систему реального времени) ОСРВ — FreeRTOS и столкнулся с рядом трудностей. В интернете есть множество статей, но внятной инструкции я не нашёл, поэтому всех заинтересовавшихся прошу под кат.
Итак для начала определимся что необходимо иметь:
- Отладочная плата Stm32VLDiscovery
- Установленную IDE Keil ARM 5 и выше
- Желание раразбираться в новом
Если вы уже разрабатывали что-либо для семейства STM32F1x в Keil, то можете пропустить этот абзац. Для начала необходимо установить пакеты для разработки для семейства STM32F1x, это делается следующим образом:
- Запускаем Keil.
- Надимаем на кнопку Pack Installer в панели
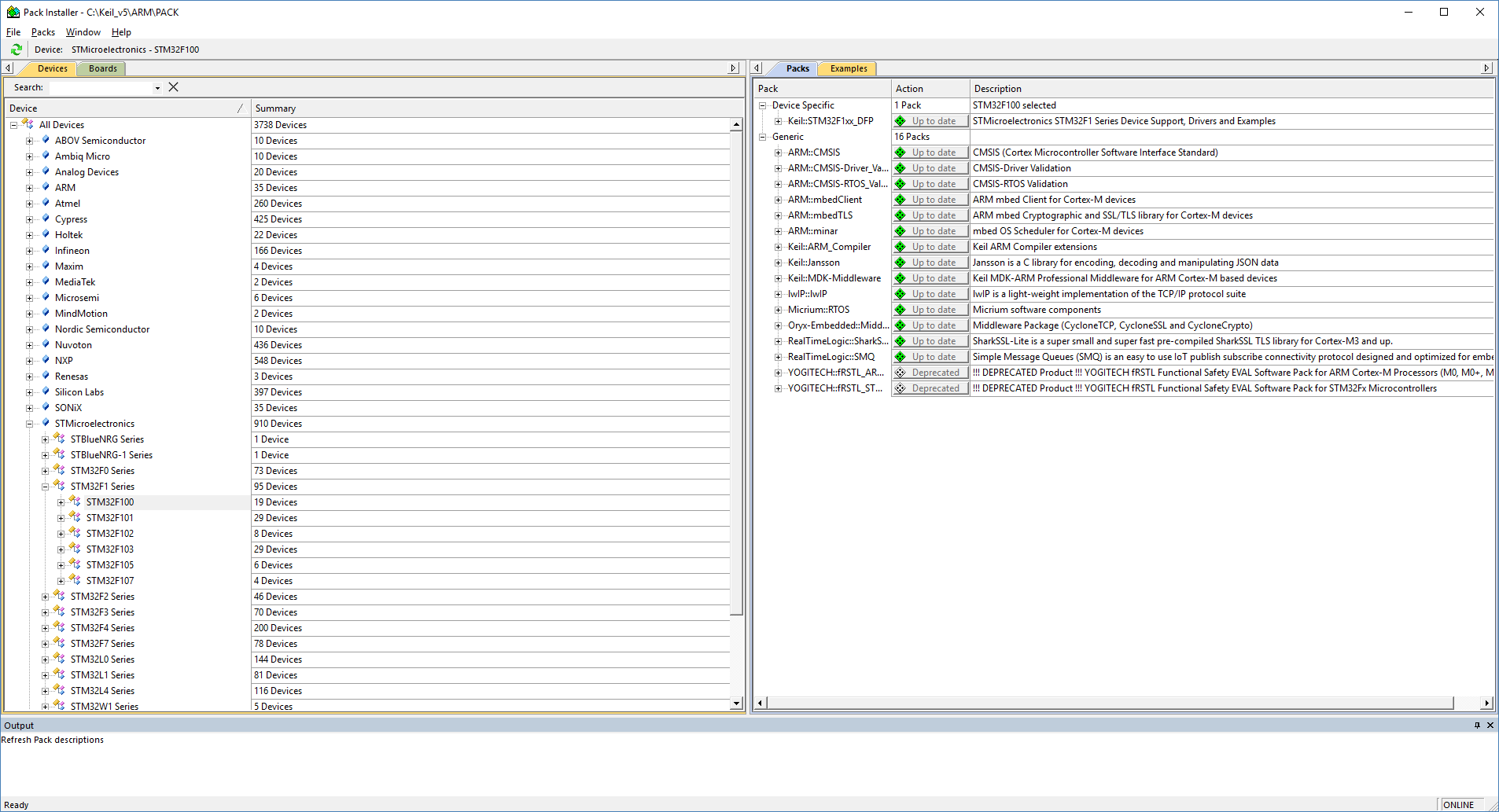
- В открывшемся окне нажимаем кнопку Check For Updates (ждём обновления списка пакетов)
- Выбираем в дереве STMicroelectronics→STM32F1 Series→STM32F100 и устанавливаем все пакеты
На этом подготовка среды разработки закончена.
Переходим непосредственно к созданию проекта с использованием FreeRTOS.
Первое что необходимо сделать это скачать свежий дистрибутив ОСРВ с официального сайта www.freertos.org, на момент написания статьи последней версией была FreeRTOSv9.0.0. Итак мы получили внушительный архив, распаковываем его в любое место (сразу скажу что 99% из него нам не понадобится, так что не пугайтесь рамера получившейся папки у меня более 200 Мб).
Теперь нам необходимо создать новый проект в Keil.

Я назвал его FreeRTOSDemo, вы можете выбрать любое подходящее название, главное чтобы в пути размещения проекта не было пробелов и русских букв.
Теперь нам необходимо выбрать наш чип, я тестировал на отладочной плате STM32VLDiscovery c чипом STM32F100RB соответственно выбирал именно его.


После выбора чипа, необходимо выбрать библиотеки которые мы будем использовать. Нам понадобится библиотека CMSIS и StdPeriph. На рисунках далее показан минимальный выбор компонентов, чтобы проверить работу ОСРВ и помигать диодиками (это касается библиотеки StdPeriph, CMSIS нужна обязательно).



Итак мы создали проект, он выглядит следующим образом:

Далее для удобства в проекте создаем несколько групп, чтобы в последствии не получилась мешанина из файлов.

Всё готово к копированию файлов ОСРВ в проект. Создадим папку FreeRTOS в папке проекта.
Из папки FreeRTOSv9.0.0\FreeRTOS\Source\ копируем все *.с файлы в созданную папку FreeRTOS. Туда же копируем папку include.
Из папки FreeRTOSv9.0.0\FreeRTOS\Source\portable\RVDS\ARM_CM3\ копируем файлы *.с и *.h в соответвующие им места папки FreeRTOS нашего проекта.
Из папки FreeRTOSv9.0.0\FreeRTOS\Source\portable\MemMang\ копируем файл heap_2.c.
Из папки FreeRTOSv9.0.0\FreeRTOS\Demo\CORTEX_STM32F103_Keil\ копируем файл FreeRTOSConfig.h.
После всех манипуляций должно получится следующее:


Далее нам необходимо добавить файлы в соответствующие группы в проекте, а также создать файл main.c c основным текстом программы.
В итоге должна получится следующая структура проекта.

Для того чтобы проект компилировался в его настройках необходимо указать все пути к *.h файлам, а также прописать дерективу USE_STDPERIPH_DRIVER.

Теперь осталось изменить несколько строк в файле FreeRTOSConfig.h, для корректной работы:
#define configCPU_CLOCK_HZ ( ( unsigned long ) 72000000 ) /*на*/
#define configCPU_CLOCK_HZ ( ( unsigned long ) 24000000 )
#define configTOTAL_HEAP_SIZE ( ( size_t ) ( 17 * 1024 ) ) /*на*/
#define configTOTAL_HEAP_SIZE ( ( size_t ) ( 5 * 1024 ) )
И добавляем следующие строки после #define FREERTOS_CONFIG_H
#define xPortSysTickHandler SysTick_Handler
#define xPortPendSVHandler PendSV_Handler
#define vPortSVCHandler SVC_Handler
После этого в файле main.c пишем простейшую программу для мигания светодиодами.
#include "FreeRTOS.h"
#include "task.h"
#include "queue.h"
#include "stm32f10x.h"
#include "stm32f10x_gpio.h"
#include "stm32f10x_rcc.h"
GPIO_InitTypeDef port;
uint8_t state;
void vFreeRTOSInitAll()
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC, ENABLE);
GPIO_StructInit(&port);
port.GPIO_Mode = GPIO_Mode_Out_PP;
port.GPIO_Pin = GPIO_Pin_9|GPIO_Pin_8;
port.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOC, &port);
}
void vLedTask (void *pvParameters)
{
while(1)
{
if (state == 0)
{
GPIO_SetBits(GPIOC,GPIO_Pin_9);
GPIO_ResetBits(GPIOC,GPIO_Pin_8);
state = 1;
vTaskDelay(500);
}
else
{
GPIO_ResetBits(GPIOC,GPIO_Pin_9);
GPIO_SetBits(GPIOC,GPIO_Pin_8);
state = 0;
vTaskDelay(500);
}
}
vTaskDelete(NULL);
}
int main(void)
{
vFreeRTOSInitAll();
xTaskCreate(vLedTask,(signed char*)"LedTask", configMINIMAL_STACK_SIZE,
NULL, tskIDLE_PRIORITY + 1, NULL);
vTaskStartScheduler();
}
Теперь можно собрать проект и залить прошивку в микроконтроллер, после перезагрузки наблюдать мигающие светодиоды.
