Университет Карнеги — Меллона научил робота-змею плавать
Лаборатория биоробототехники в Университете Карнеги — Меллона обучила своего змееподобного робота HUMRS плавать под водой. Робота-змею можно будет использовать для проверки состояния кораблей, подлодок и инфраструктуры под водой, говорят исследователи.
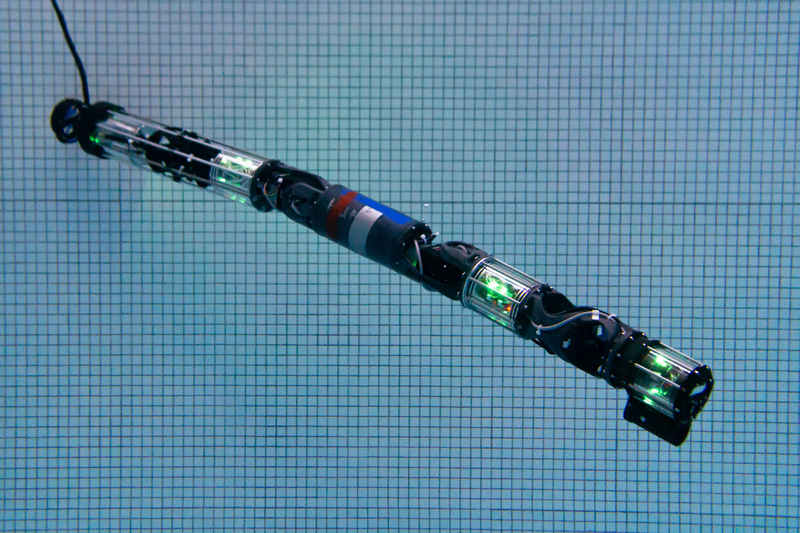
HUMRS испытывали в университетском бассейне. Робот смог нырять и проходить через подводные обручи.

Погружной робот-змея был разработан на грант Института передовой робототехники для производства (ARM). По словам Мэтта Фишера, руководителя программы института ARM, работающего над проектом, его целью является помощь министерству обороны США в проверке кораблей, подводных лодок и другой подводной инфраструктуры на предмет повреждений или в рамках планового технического обслуживания.
Обычно военные отправляют для проверки команду водолазов, либо заводят судно в сухой док. Оба эти мероприятия достаточно дорогостоящие и требуют временных затрат. Подводный робот мог бы оперативно осматривать корабль, немедленно предупредив экипаж о критических повреждениях или отправив информацию о проблемах в порт.

Фишер, который служил в ВМФ, говорит, что уведомительная система в доках могла бы сэкономить недели или даже месяцы в графике технического обслуживания. Он также отмечает, что многие задачи по проверке кораблей, например, осмотр балластных цистерн подлодок, слишком тяжелы для человека, и их можно было бы передать роботам.
Роботы-змеи могут также осматривать подводные трубы на предмет повреждений или засоров, оценивать морские нефтяные вышки или проверять целостность резервуаров. Их можно использовать для проверки и обслуживания различных систем.
Модульная конструкция робота позволяет ему проходить через узкие щели, взбираться по дереву или плавать. Для подводного робота-змеи используются специальные водонепроницаемые модули.
Университет Карнеги — Меллона работает над проектом модульного робота-змеи с 2013 года. Разработка подводного робота велась с июля 2020 года.
В прошлом году исследователи из Университета Карнеги—Меллона показали робота, который воспроизводит структуру и движения морской звезды. Он может ползти под водой при помощи пяти ножек, которые приводятся в действие благодаря «скелету» из металла с эффектом памяти формы (SMA). Разработчики заявили, что робот сможет выполнять простые миссии под водой.
