«Умная рыбалка» на FishSensor
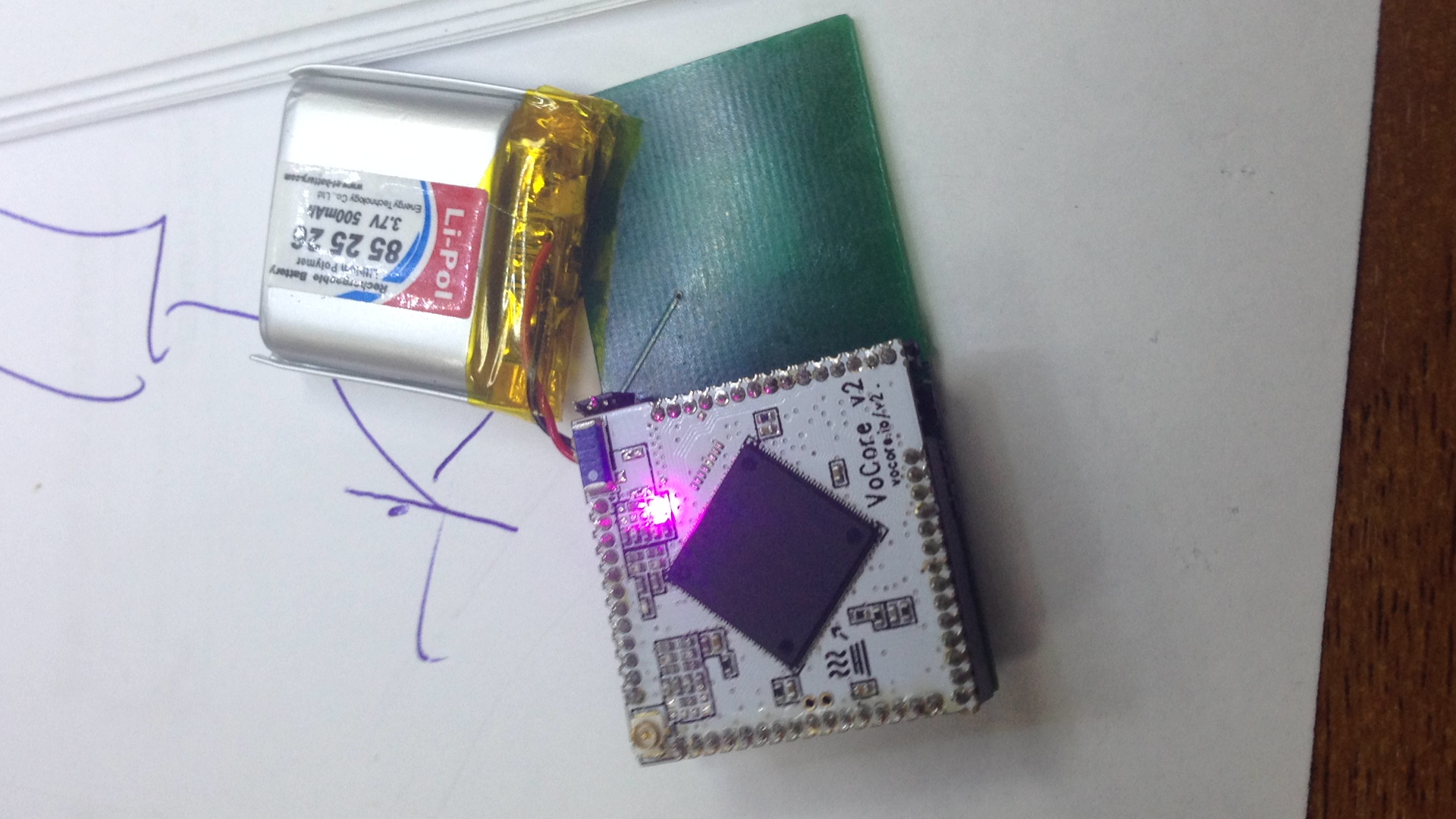
«Плохой день на рыбалке лучше, чем хороший день на работе». Существует огромное количество электронных сигнализаторов поклёвок. Мой вариант отличается наличием WiFi c WEB-приложением, акселерометра и безпроводной зарядки, класс защиты IP68. Мозг устройства — самый маленький Linux-компьютер Vocore2, акселерометр MPU6050, Qi зарядка на базе BQ51050BRHLT. Исходники можно скачать здесь Github.
Технические характеристики FishSensor:
- операционная система OpenWrt 15.05.1 «Chaos Calmer» ;
- связь с мобильными устройствами по WiFi;
- дальность связи 30–50 м;
- контроль поклёвок — звуковой (только Android), визуальный ;
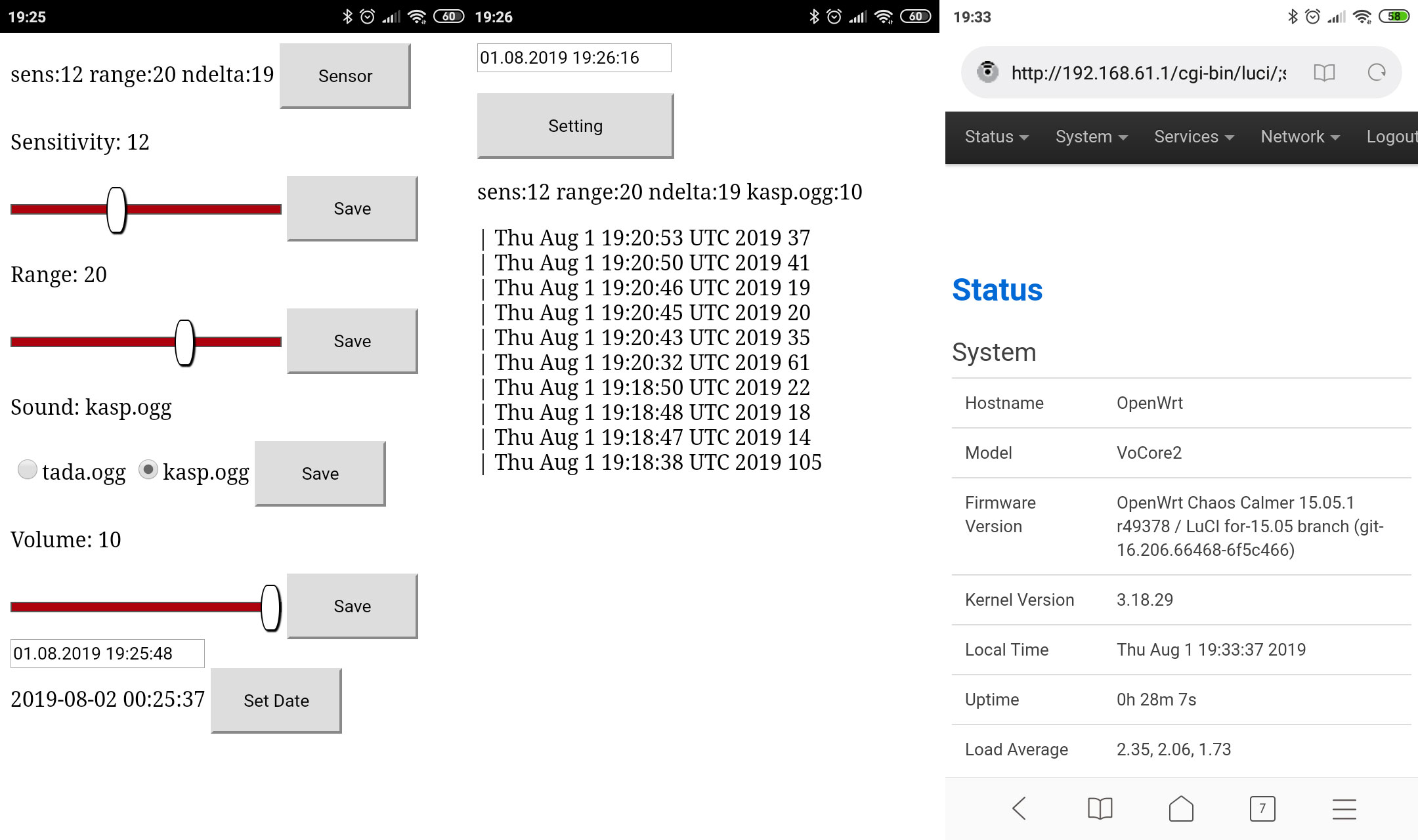
- удаленная настройка чувствительности, мелодии, громкости;
- наличие интернета необязательно;
- длительность работы 3 часа (аккумулятор LiPo 500mAH)
- беспроводная Qi зарядка (до полного 1.5 часа)
- класс защиты IP68;
- габаритные размеры 60×30 х 11 мм;
- вес 22 г
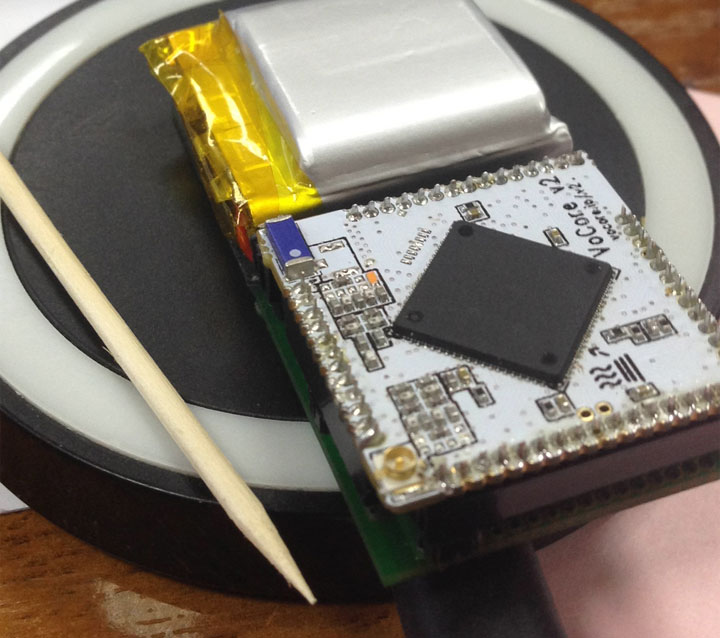
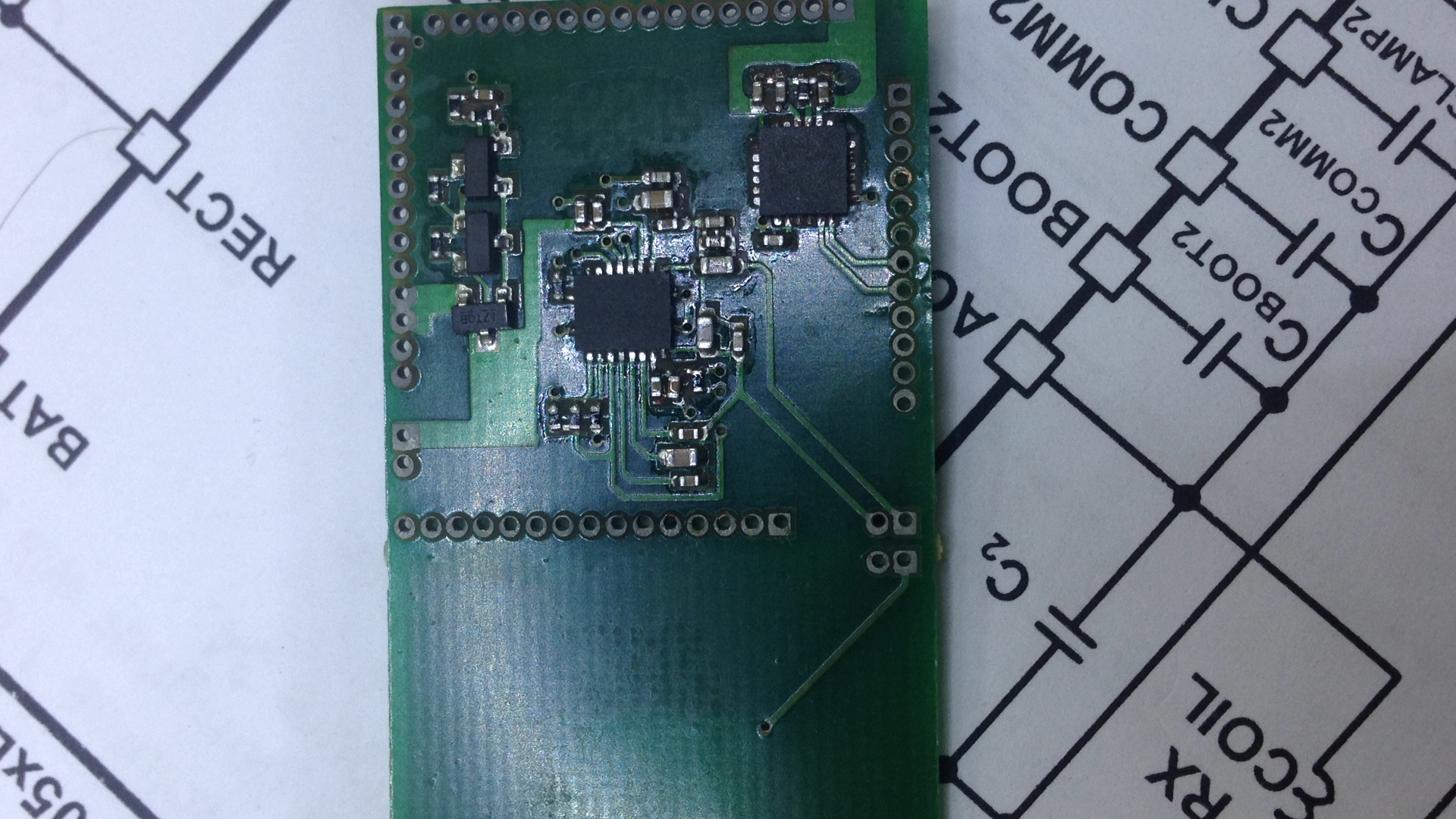
Устройство конструктивно представляет собой плату, на которой расположены антенна приемника и драйвер Qi зарядки BQ51050BRHLT, акселерометр MPU6050, разъём для подключения Vocore2, аккумулятор. Пылевлагозащищенность за счет термоусадочной трубки, с торцов залито силиконовым компаундом Rexant ПК-68. Протяжка рыболовного поводка через пластиковую трубку с внутренним диаметром 2 мм.
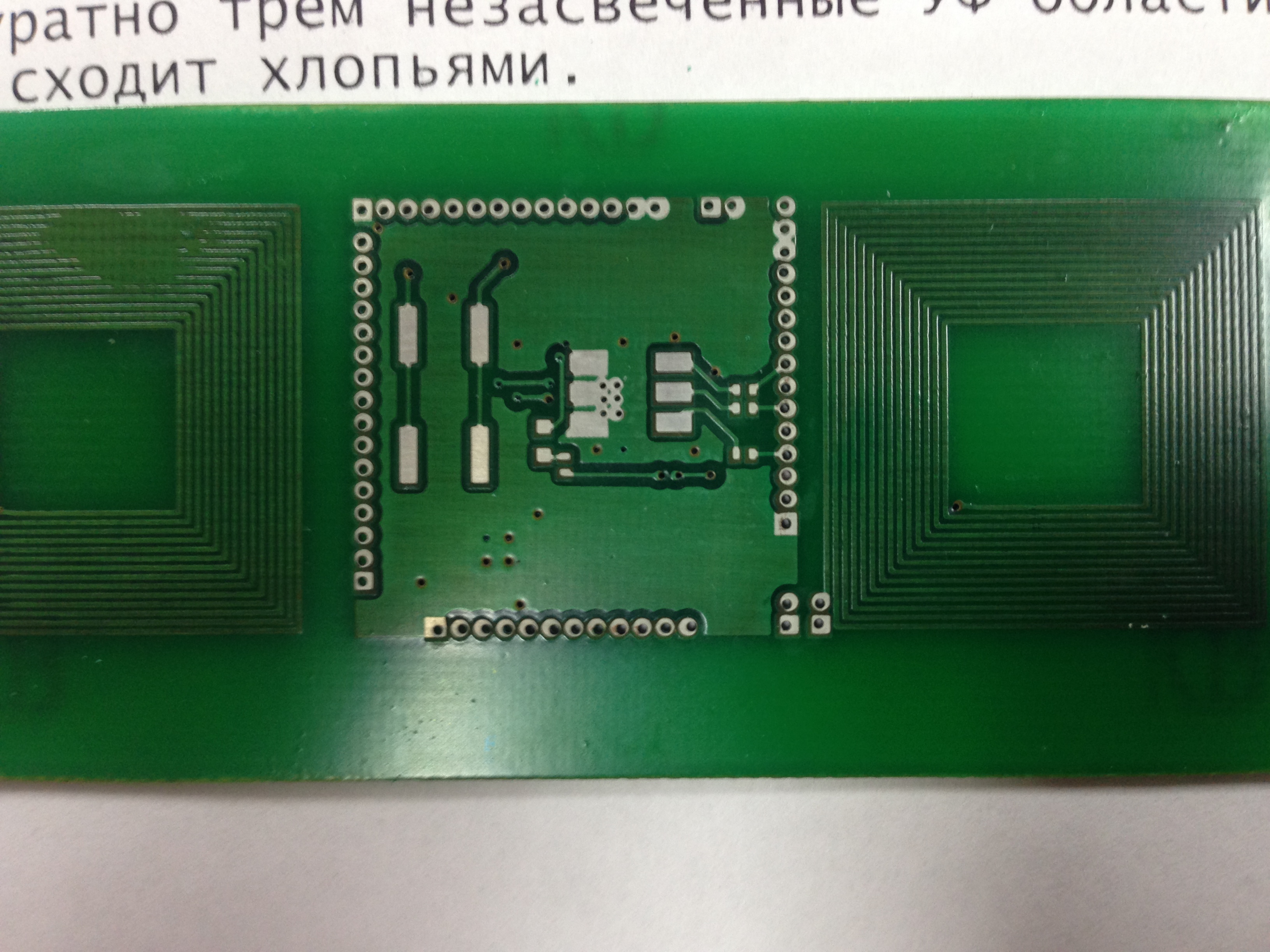
Изготовление печатной платы
Остро стоял вопрос, получится ли сделать на плате катушку индуктивности Qi приемника размером 25×25 мм, 14 витков, толщина дорожки 0.3 мм, зазор 0.2 мм и какая получится реальная индуктивность катушки. Расчетные данные подтвердились и дали индуктивность 4 µH.


Пайка элементов
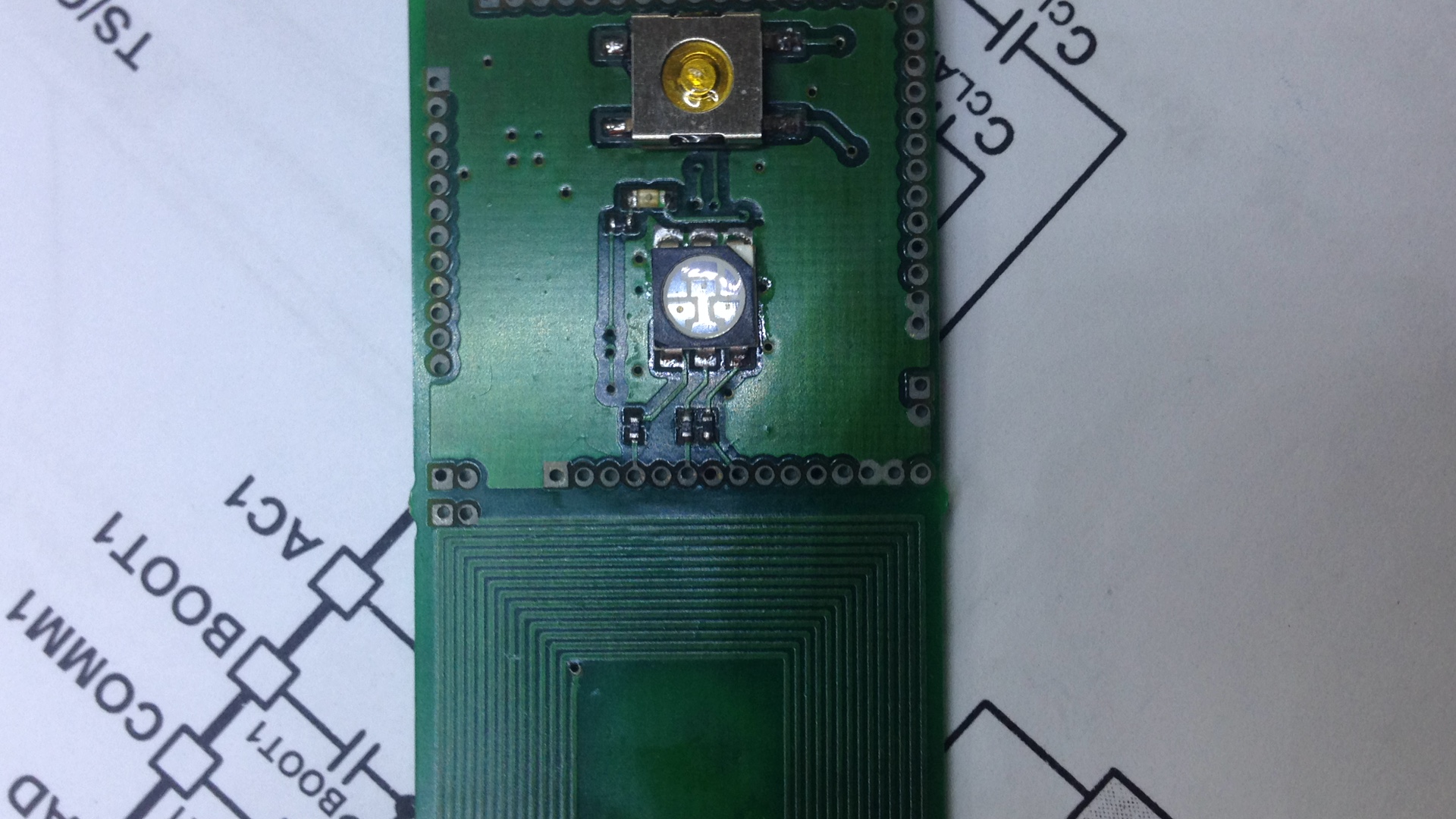
Настройка Qi зарядки
Интересным моментом оказалась настройка резонанса колебательного контура. Рекомендации и расчетные формулы даташита на BQ51050BRHLT подтвердились. Индуктивность 4 µH, индуктивность с ферритовым экраном 7 µH, конденсатор в параллели 6.5 nF, конденсатор последовательно катушке 422 nf. Добротность контура получилась очень низкой 22 из за большого сопротивления катушки 1,7 Ом (даташитом рекомендована добротность более 500). Тем не менее все заработало отлично, на расстоянии 10 мм от катушки передатчика устойчивый резонанс.

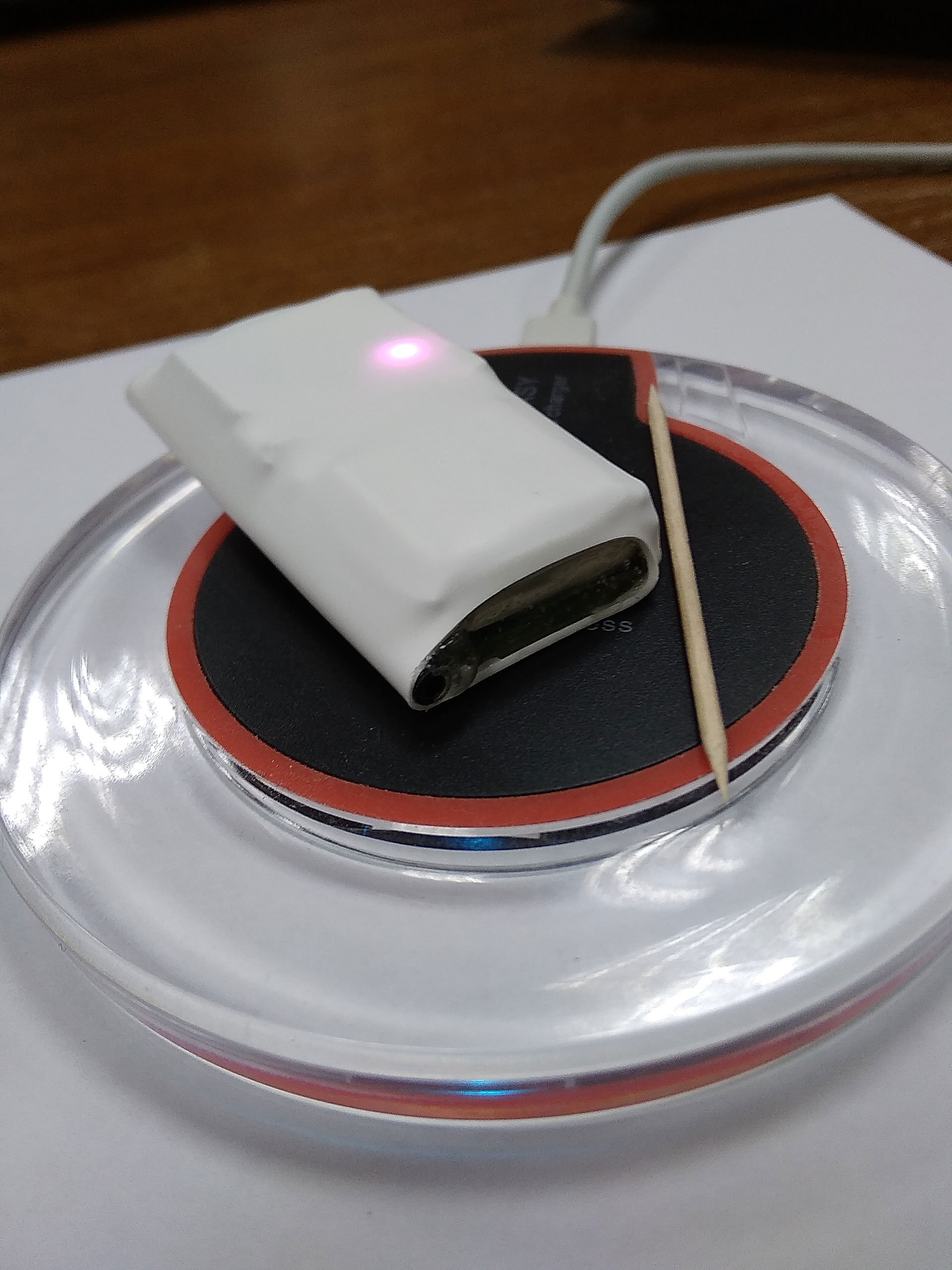
Конструктивный просчет — индикатор зарядки находится со стороны антенны, т.е. его не видно когда FishSensor лежит на передатчике зарядного устройства. Но процесс зарядки виден на индикаторе самого передатчика Qi.
Настройка акселерометра
Программное обеспечение
На борту Vocore2 c завода установлена OC OpenWrt 15.05.1 «Chaos Calmer». Устройство доступно по WiFi через браузер благодаря предустановленной Luci. Используем режим точки доступа AP.
Установил пакет php5 и все необходимые библиотеки для формирования Web-интерфейса. Установил пакет для MPU6050 от leon0516. В автозагрузку поместил файлы автозапуска драйвера MPU6050 и своего скрипта написанном на баше 6050.sh. Драйвер MPU6050 генерирует текстовый файл показаний акселерометра /tmp/mpu6050.txt. 6050.sh анализирует в файле /tmp/mpu6050.txt только изменения по оси Z и записывает свой лог в /www/mess.log. Страницы настройки и отображения написаны на php.
Смартфон подключаем к FishSensor как к точке доступа. Устанавливаем на рабочий стол из браузера как Web-приложение. Для Android в настройках браузера разрешаем автовоспроизведение звуковых файлов (в iOs такой финт запрещен политикой безопасности).
Столкнулся с проблемой кеширования данных записываемых в текстовый файл операционной системой OpenWrt. Показания акселерометра пишутся в файл при заполнении кеша памяти, иногда задержки достигают до 1 секунды. Существующий патч для выключения кеширования файлов нерабочий. Посчитал, что для моей задачи это не сильно актуально и решил оставить проблему до лучших времен.
Демо
Натурные испытания пока не проводились, планируются в этом месяце.
P.S. Развитием идеи может быть аккумуляторный шуруповерт с установленным в него Vocore для подсекания снасти в момент поклевки.
