Ставим электромотор на сап борд своими руками

Сап борд (Sup board) все больше набирает популярность. Обычно это надувная здоровая доска, на которой можно стоять/лежать/заниматься йогой и проводить пикник на воде, а для перемещения грести веслом как раб на галере.
Последнее не для нас — надо ставить электромотор.
А что там у людей?
На начало 21 года была модель Aquamarina BlueDrive S за немаленькие деньги (сейчас цены стали доступнее), Scubajet и немного китайских поделок с алиэкспресса. Раз что-то такое уже есть, значит идея не совсем безумная, а если их мало — то это еще неизъезженная тема, и можно быть в ряду первопроходцев.
Аналоги предполагают крепление к низу доски на место плавника. Мне такое решение не понравилось:
Сложность спуска на воду. Легко повредить двигатель/винт зацепив дно.
Не все сапборды имеют стандартный плавник по центру, например, из трех досок у меня одна имеет два плавника, а две другие имеют несовместимые плавники. Такие вот стандарты.
Если винт намотает на себя водоросли, то очистка будет затруднена.
При плавании на веслах мотор будет создавать лишнее сопротивление.
Поэтому я выбрал вариант ставить мотор в хвосте сзади с креплением на шарнире.
 В итоге получилось так.
В итоге получилось так.
Изначально хотелки были такие:
Плавная регулировка мощности для экономичности.
Запас хода на 5 часов.
Безопасность. При падении с доски двигатель должен сам отключаться.
Защита винта.
Конструкцию и электрику переделывал практически после каждого заплыва. Но для большей ясности текста повествование будет не в хронологическом порядке по каждой конструкции, а отдельно по компонентам.
Мотор и регулировка мощности.
 Мотор Watersnake T18 и диммер WB-MRGBWD.
Мотор Watersnake T18 и диммер WB-MRGBWD.
Сначала я выбрал Watersnake T18, пожалуй, самый маленький и дешевый электромотор для лодок. Крепление и все остальное выкидываем, трубку укорачиваем. Масса оставшегося двигателя 1,2 кг, 12 В/15 А. Мотор имеет 2 скорости. Пониженная скорость достигается последовательным подключением проволочного резистора в трубке двигателя. Такое расточительство энергии меня возмутило, и я его тоже выкинул.
Если литий-полимерные аккумуляторы соединять по 3 шт последовательно, то рабочее напряжение будет в диапазоне 9–12,6 В, что маловато. А если по 4 шт, то 12–16,8 В, что многовато. Хотя фактически мотор и выдерживает 16В, но КПД падает, и он явно перегревается. Поэтому для снижения и регулировки мощности нужен какой-нибудь ШИМ регулятор. Под руку попался диммер светодиодных лент с лаконичным названием WB-MRGBWD. Объединил два канала для большего тока и поставил мощный диод Шоттки между + и — мотора, т .к. диммеры для светодиодных лент не рассчитаны на работу с индуктивной нагрузкой.
Управление в диммере с помощью кнопок — короткое нажатие — вкл./выкл. Длинное нажатие — плавное увеличение/уменьшение мощности. К сожалению, первый же заплыв показал неудобство такого управления:
Обратная связь (ощущение тяги) от мотора идет с задержкой, не помогает даже если смотреть на показания ваттметра. Поэтому изменять мощность приходится наугад.
Т.к. диммер для регулировки светодиодных лент, то в нем логарифмическая кривая яркости, т.е. плавное разгорание вначале и быстрое к концу шкалы. Для электромотора же интересна регулировка как раз наоборот.
Ничего приличного на ток в 15–20А нагуглить сходу не получилось, да и я ж мамкин электронщик, сделаю свой регулятор для мотора. Синхронный (высокое КПД), со стабилизацией по току двигателя (мощность не зависит от напряжения аккумуляторов), регулировкой переменным резистором, и чтоб при разрыве провода от пульта двигатель сразу отключался.
Но вообще, можно так не заморачиваться и купить с алиэкспресса что-нибудь. Искать по словам «PWM DC Motor Speed Controller» на ток от 20А.
Вот так делать не надо. Купите готовый.
Аккумуляторы
Начал с самых стандартных Li-pol 18650 56 шт по 3200 mА*ч (потом кол-во уменьшил), соединил по схеме 4S14P — последовательно 4 блока по 14 шт + плата защиты.
Аккумуляторы сварил контактной сваркой, но, вроде, можно и паяльником с флюсом такое паять. Еще их нужно чем-то заряжать, у меня уже была зарядка, но есть весьма бюджетные варианты — IMAX B6AC и подобные.
Измерение параметров.
Желательно знать остаточную емкость батареи, чтобы не уплыть далеко и успеть вернуться. Просто, и довольно точно, можно прикидывать емкость по напряжению. Аккумуляторная батарея работает с небольшим током разряда ~0,5С, и ее заряд примерно пропорционален напряжению ячеек от 3,0В до 4,2В.
Еще, конечно, интересно знать потребляемый ток (или ток мотора?).
В первые прототипы вклеивал такой Ваттметр. Но дешевле взять измерительную головку с внешним шунтом. Приклеив окошко клеем по периметру получается еще и герметично без кучи термосоплей.
Экстренное отключение мотора.
Сап борд достаточно устойчив, но падение в воду исключать нельзя. Хотя он привязывается к ноге и далеко не уплывет, но взбираться на полном ходу будет неудобно. Первый вариант отключения был из геркона и магнита на шнурке, но, по сути, отдельный механизм — лишняя деталь. Есть же пульт управления (регулировка скорости или выключатель). Надо только выполнить три условия: крепить на пояс, сделать свободное отсоединение, короткий кабель (чтобы сразу отсоединялся при падении). Ах да, еще проверить, что при его отключении мотор действительно останавливается, а не как у меня.
Отсоединение можно сделать на разъемном клеммнике посредине кабеля, например, используя пару 15EDGKR-3.81–03P и 15EDGK-3.81–03P.
Конструкция и крепление к сапборду.
Прикрепить что-то к сап боруду оказалось нетривиальной задачей, и конструкция выработалась не сразу.
Сапборд весь немножко мягкий, форма округлая, сверлить нельзя, шуруп не вкрутишь. Мотор же создает большой опрокидывающий момент. А при гребле веслом норовит сдвинуться вбок. И при переворачивании сапа не должно все утонуть. Первая версия была на фанерном основании с герметичным пластиковым корпусом с аккумуляторами и электроникой. К сапу крепил обматыванием резинками из велопокрышек и дополнительно веревкой. Было плохо. Резинки сползали к плавнику, создавали лишнее сопротивление в воде, цепляли водоросли. Надежность низкая. Пробовал приклеивать основание на липучки к сапборду — не держится, липучки отклеиваются в воде и еще портят внешний вид.
Для уменьшения влияния моментов сил надо разнести точки крепления на как можно большее расстояние, сохранив удобство транспортировки. Сапборд, в зависимости от конструкции, для переноски скатывается в рулон шириной ~80 см или складывается пополам вдоль; сворачивается и укладывается в квадратную сумку, а весло отдельно. В любом случае, есть весло длиной 70–80 см, поэтому компактный корпус такой длины не осложнит транспортировку.
Такими рассуждениями пришел к конструкции из двух разборных частей: длинный короб с аккумуляторами и всей электроникой и двигатель с подъемным механизмом.

К корпусу притягивается стяжкой для грузов с парой винтовых карабинов. Карабины образуют полиспаст, и усилие стягивания увеличивается в 3 раза.
Подъемный механизм.
Конструкция незамысловатая — тянем за верочку, мотор поднимается. Фиксируем веревку узлом в прорезь. Для опускания отцепляем, под силой тяжести мотор опускается. В конструкции важно правильно определить ось поворота, — подъем не должен требовать больших усилий, и в поднятом состоянии мотор был как можно ближе к сапу, чтобы можно было дотянуться рукой до винта и очистить его от мусора.
Вторую версию сделал на скорую руку из фанеры, склеил термоклеем, покрыл лаком в 2 слоя. Термоклей дает сносную герметичность и разборность конструкции. После прогрева феном можно отделить крышку. Получилось неплохо, с этим уже можно комфортно плавать.
У конструкции нашлось слабое место — это точка крепления уголков к основанию. Момент сил большой, и в одном заплыве корпус постепенно растрескался по всей длине. Внутрь попала вода, и защита аккумуляторов отключила их в самый ответственный момент, когда переплывал канал с активным движением скоростных катеров. Неприятно. Усилил хвост, добавил термоклея- растрескиваться перестало. Но конструкцию надо в этом месте переделать.
Корпус под лазерную резку.
Пора делать красиво. Вдохновляюсь деревянными конструкторами и черчу корпус под лазерную резку!
Фанера в 4 мм оказалась недостаточно жесткой. Она трехслойная и в одном направлении на изгиб жесткая, а в другом гнется как шпон. Хоть короб получился жестким, но все силовые элементы слабые. С фанерой в 6 мм стало в разы прочней. В идеале, если короб делать из 4 мм, а остальное из 6 мм, можно сэкономить еще грамм 200.
Изготовление обошлось в 2000 руб в местной рекламной компании. Собирать одно удовольствие, как конструктор, все детали аккуратно входят друг в друга. Склеиваем на ПВА, сверху два слоя лака.
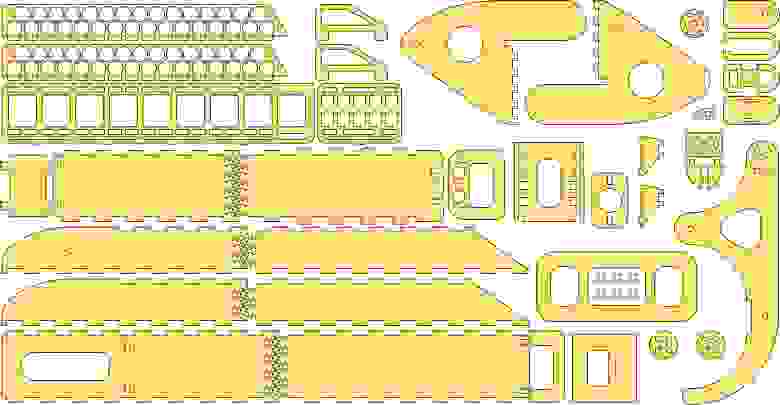
Скачать файл.
Бесколлекторный Мотор.
Мне, видимо, попался бракованный мотор. После каждого заплыва я разбирал его, и с него вытекало полкружки воды. Хотя внешне все хорошо, прокладка на месте, сальник тоже вроде норм. Хм, но если уж коллекторный мотор умудряется работать в воде, то бесколлекторный будет работать еще лучше! Двигатель взял Turnigy SK3 Aerodrive — 5045–450kv. Сам двигатель промазал лаком. Родное крепление идеально подошло под винт. Аккумуляторы перепаял по схеме 3S.
Опыты в ванной показали работоспособность идеи и максимальную потребляюмую мощность в 400 Вт, а больше нам и не надо! И так 40А тока. К сожалению, внезапно настала зима, и полноценно испытать на воде не успел. Остался ряд вопросов. Проработают ли подшипники в воде какое-то время, или сразу заклинят? Можно заменить их на латунные втулки. Стандартный драйвер бесколлекторного двигателя без ограничения тока, не сгорит ли все ярким пламенем, когда винт намотает кувшинок? От таких раздумий я аж начал рисовать свой регулятор с ограничителем тока, но надо бы сначала потестить китайские платы. Может хабровчане подскажут проверенные решения?
Бесколлекторный выглядит крайне заманчиво — масса почти на 1 кг меньше, мощнее, выше КПД, компактней. Весной обязательно продолжу изыскания.
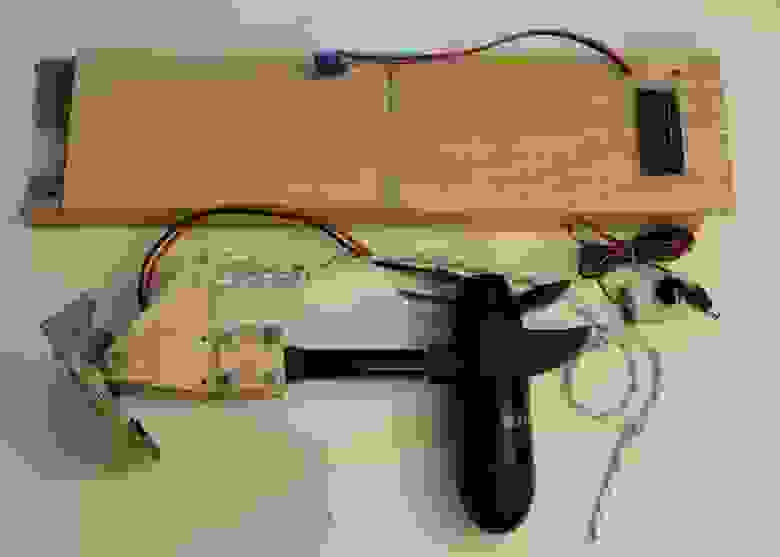
 Внутренности вынуты.
Внутренности вынуты. Вид сбоку всборе.
Вид сбоку всборе.
Опыт отдыха и эксплуатации:
Возможность поднять двигатель и очистить винт от намотанных растений оправдала себя на 146%. Плавал по мелкой подмосковной речке и окрестностях: растительности, тины и кувшинок много. Чистить приходилось часто. А густые заросли можно проплыть на веслах, подняв двигатель. За плавник, конечно, тоже цепляется всякое, но сильно меньше и чистить легко.
Защиту от винта снял, сначала мешалась, а потом пользы не видел. Теоретически опасно, практически — винт довольно далеко и под доской, при падении сразу отключается, а рядом с купающимися мотор не стоит включать в принципе.
Запас хода. Идея, что можно плавать весь день, оказалась слишком оптимистичной. Плавать даже с электромотором утомительно. На сапе надо или стоять, или сидеть по турецки, лежать тоже можно, но ничего не видно. Надо равновесие держать, еще укачивает. Самый долгий заплыв получался ~ 4 часа на воде (с остановками и отдыхом), и заряда тратил максимум 2/3. Поэтому считаю, что запас хода более 2 часов непрерывного хода не нужен, и кол-во банок 18650 можно уменьшить до 28–32 шт, будет легче и дешевле. К тому же, если неожиданно закончится заряд, всегда можно поднять мотор и догрести немного веслом.
Скорость. В км/ч не мерил, но в сравнении с веслом — как будто гребешь со всех сил. Т.е 150–200 Вт на моторе позволяют бодренько обгонять ретроградов с веслами. Стоить отметить, что у сапа низкая «мореходность», и его скорость сильно падает даже на небольших волнах.
Проходимое расстояние. При прочих равных (время/усталость) примерно в 3 раза больше, чем на весле.
Бесшумность. Почти полная. Едва заметная вибрация, тихий плеск воды.
Кайф. Присутствует. Тишина. Сидишь красотами с воды любуешься, а оно само плывет.
А вот плавная регулировка мощности — бесполезна почти полностью. Из-за медленной реакции плавно регулировать неудобно даже крутилкой — рассматривать положение ручки некогда, крутишь вслепую. Удобно иметь 3–4 положения переключателя. Или вообще ограничиться только вкл/выкл. На полной мощности сап плывет не настолько быстро, чтобы хотелось сбавить скорость. А если нужно, например, аккуратно подплыть к берегу, то мотор отключаешь и гребешь веслом. Весло дает больше контроля над доской.
Из-за бесполезности плавной регулировки и небольшого запаса хода можно вообще сделать эрзац-вариант с железо-фосфатными аккумуляторами LiFePO4. Они имеют меньшую емкость, но безопасней, разрядная характеристика довольно плоская и 4 последовательно дадут нужные 12В.Т. е. можно обойтись без регулятора да и вообще без всякой электроники — пара проводов и пульт с выключателем.
Примерный расчет разных вариантов:
Коллекторный + LiFePO4 — ~20 т. руб, 6 кг и пару дней труда.
На 2 часа с мотором на 180Вт надобится аккумуляторов общей емкостью 120А*ч, это например 24 штуки Lishan 32650–50M, общей стоимостью в 8,5 т. руб. и весом 3,3 кг.
Аккумуляторы — 8,5 т. руб., 3,3 кг.
Двигатель — 7 т.руб., 1,2 кг
Корпус — 1,2 кг
Коллекторный + LiPol — ~25т. руб., 4 кг. Работы по пайке проводов больше.
На 2 часа надо 28 шт BAK N18650CP:
Аккумуляторы — 13 т.руб., 1,4 кг.
Регулятор и вольт-амперметр. , 2 т. руб., 0,2–0,3 кг.
Двигатель — 7 т.руб., 1,2 кг
Корпус — 1,2 кг
Бесколлекторный + LiPol — ~23 т. руб., 3 кг. Работы еще чуть больше.
Те же 28 шт BAK N18650CP, двигатель Turnigy SK3 Aerodrive — 5045–450kv. — 5т руб, 0,3 кг.
Аккумуляторы — 13 т.руб. 1,4 кг.
Регулятор и вольт-амперметр — ~2 т. руб, 0,2–0,3 кг.
Двигатель — 5 т. руб, 0,3 кг.
Корпус — 1,2 кг
