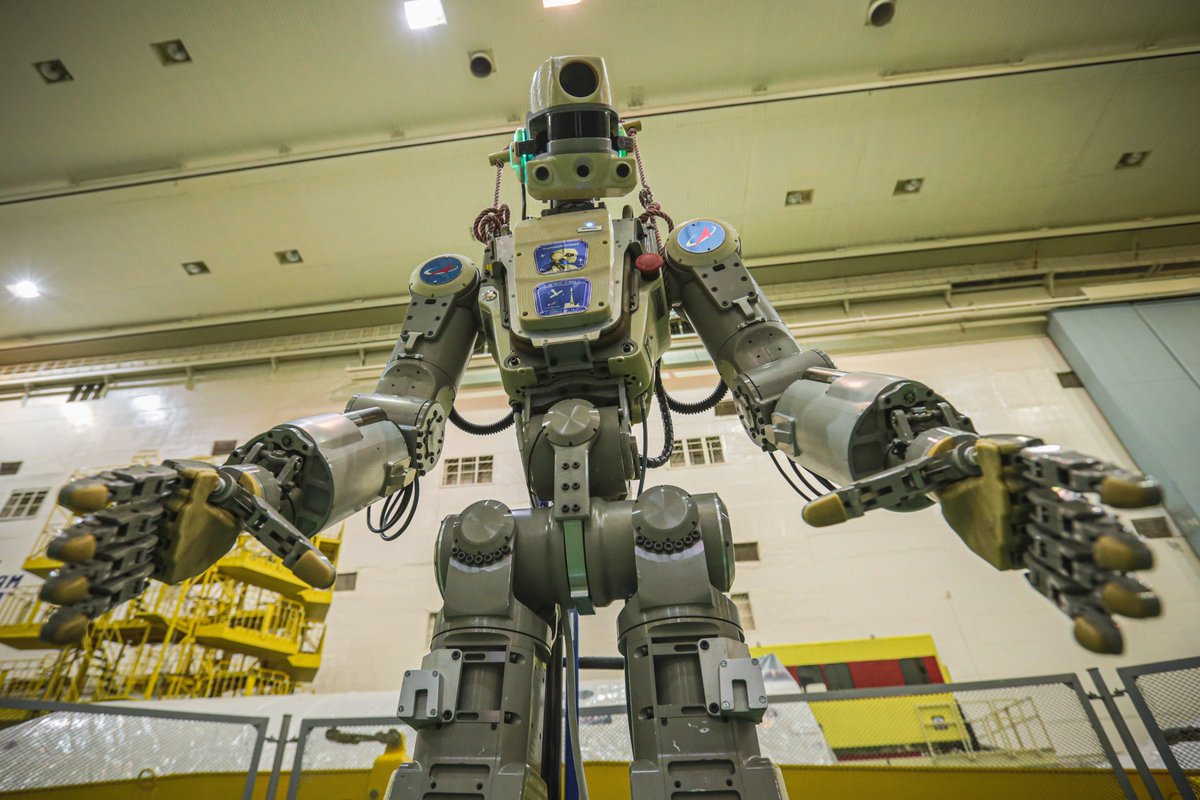
Совет главных конструкторов по российскому сегменту МКС разрешил запуск корабля «Союз МС-14» с роботом FEDOR

С учетом оценки фактического состояния совет главных конструкторов принял решение допустить российский сегмент МКС к выполнению программы работ с кораблем «Союз МС-14».
В продолжении этих публикаций:
Люк корабля «Союз МС-14» оказался узок для робота FEDOR
Как доработали робота FEDOR и кресло для полета на МКС
Робот FEDOR — тренировка с новым экипажем МКС и первые космические задачи
На МКС полетит не FEDOR, а Skybot F-850
Перед стартом на МКС робот FEDOR (Skybot F-850) завел твиттер
Робот FEDOR (Skybot F-850) учится… открывать бутылку и брать отвертку
В РКК «Энергия» (входит в Госкорпорацию «Роскосмос») состоялось заседание Совета главных конструкторов по российскому сегменту Международной космической станции (РС МКС).

О задачах, связанных с подготовкой к запуску транспортного пилотируемого корабля (ТПК) «Союз МС-14» сообщил генеральный директор РКК «Энергия» Николай Севастьянов.
Он подчеркнул, что этому запуску уделяется особое внимание, поскольку миссия является отработочной и должна положить начало пилотируемым полётам кораблей «Союз МС» на ракете-носителе «Союз-2.1а».
Предстоящему старту «Союз МС» предшествовали 8 успешных запусков ракеты «Союз-2.1а» с кораблями «Прогресс МС».
Генеральный директор корпорации напомнил, что с 2020 года запуски пилотируемых кораблей «Союз МС» будут производиться на ракете-носителе «Союз-2.1а» со стартовой площадки №31 космодрома Байконур.
Заместитель главного конструктора перспективных космических комплексов и систем корпорации Игорь Хамиц доложил о выполнении задач по переводу запусков пилотируемых кораблей «Союз МС» на ракету-носитель «Союз-2.1а» и программе лётных испытаний ракетно-космического комплекса ТПК «Союз МС»/РН «Союз-2.1а».
С докладом о готовности к проведению лётных испытаний РКК с кораблём «Союз МС-14» выступил представитель РКЦ «Прогресс» Сергей Волков.
О ходе подготовки к запуску транспортного пилотируемого корабля «Союз МС-14» доложил первый заместитель генерального директора РКК «Энергия» Сергей Романов.
С докладами о готовности всех систем и приборов корабля «Союз МС-14» и РС МКС также выступили главные конструкторы, ответственные представители РКК «Энергия» и организаций-соисполнителей: НИИ ТП, «Российские космические системы», ЦНИИ РТК, НПП «Квант», НПО ИТ, «Орбита», НПП «Звезда», МКБ «Искра», НИИ парашютостроения, КБ ХИММАШ, НИТС, НИИ СК, ЦЭНКИ, ЦНИИмаш, Росавиация, НИИ ЦПК, КБ «Салют» и др.
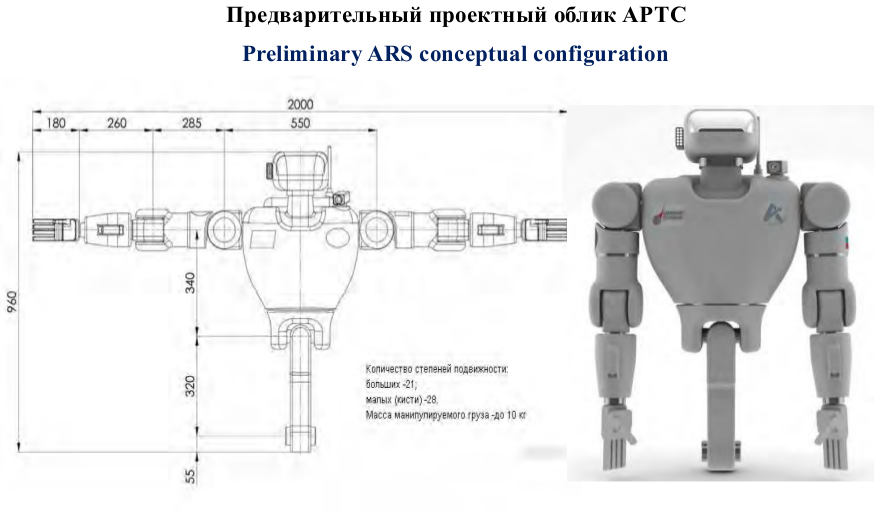
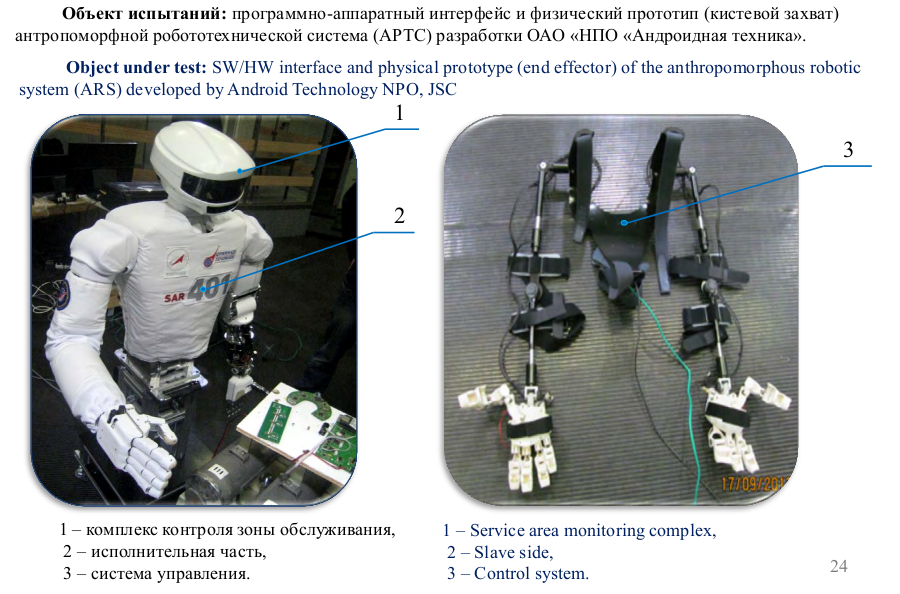
О целях космического эксперимента «Испытатель», в ходе которого будет протестирована работа антропоморфной робототехнической системы (АРТС) Skybot F-850, рассказал представитель НПО «Андроидная техника» Игорь Сохин.
Программу полёта на предстоящий период и доклад о готовности МКС, Главной оперативной группы управления (ГОГУ) и средств обеспечения полёта к выполнению работ с кораблем «Союз МС-14» представил первый заместитель генерального конструктора по лётной эксплуатации, испытаниям ракетно-космических комплексов и систем РКК «Энергия» Владимир Соловьёв.
По итогам заседания Советом главных конструкторов одобрены предложения РКК «Энергия» по плану предстоящих работ по подготовке корабля «Союз МС-14» к запуску 22 августа 2019 года.
С учётом оценки фактического состояния Совет главных конструкторов принял решение допустить РС МКС к выполнению программы работ с кораблем «Союз МС-14».


Что же это за космический эксперимент «Испытатель»?
Это исследование возможностей использования дистанционно-управляемого антропоморфного робота в перспективных пилотируемых транспортных кораблях нового поколения.
Таким образом, АРТС (антропоморфные робототехнические системы) будут основным элементом технологии освоения космического пространства.
Космическая робототехника — направление в робототехнике, разрабатывающее робототехнические комплексы или системы для решения прикладных задач в экстремальных условиях космоса, на поверхности безатмосферных космических тел, в атмосфере планет земного и неземного типа.
Космическая робототехника сможет увеличить возможности для создания принципиально новых типов космических аппаратов, работающих в пилотируемом и беспилотных режимах, что расширит их функциональные возможности, повысит безопасность, надежность и долговечность работы, обеспечить сохранность устройств, уменьшит эксплуатационные расходы.
Области применения робототехнических систем в космосе:
— работа в открытом космосе (в условиях вакуума, жестких ионизирующих излучений) снаружи и внутри космических кораблей (эмоциональная поддержка экипажа, обслуживание, регламентные и ремонтные работы, сборочные, разгрузочно-погрузочные работы, инспекция, различного рода манипуляции);
— работа на поверхности планет и других космических тел (исследование, освоение, строительство).
Антропоморфные робототехнические системы (АРТС), могут быть применены на космических станциях, напланетных базах и межпланетных комплексах.
На сегодня, наиболее ожидаемо использование РТС на наружной поверхности орбитальных станций околоземных, лунных и марсианских.
Такие РТС могут доставляться к месту выполнения работ грузовыми манипуляторами, за пределами зон досягаемости которых роботы перемещаются самостоятельно.
Первоочередными задачами являются инспекция, установка и обслуживание оборудования, помощь космонавтам при вне корабельной деятельности.
Эффективное использование АРТС возможно лишь при соответствующей его адаптации к выполнению полетных операций.
В связи с этим, необходимо сформировать уточненные требования к значениям кинематических и силовых параметров принятой структуры исполнительной системы демонстрационного образца РТС.
Научная новизна космического эксперимента «Испытатель» заключается в:
— проверке адекватности, уточнении и верификации математической модели АРТС как многозвенной приводной машины, действующей в условиях невесомости в ограниченном пространстве;
— исследовании комплексного влияния факторов космического полёта на системы АРТС (датчиковая аппаратура, в том числе средства силомоментного очувствления и средства технического зрения, элементы точной механики и т.д.);
— уточнении требований к системе управления манипуляторами и захватами в режиме тонкой моторики для обеспечения выполнения операций при воздействии факторов космического полета;
— уточнении требований к характеристикам приводов манипуляторов и захватов для обеспечения выполнения силовых операций с замками, задвижками, вентилями и т.д., функционирующих как в условиях невесомости, так и нормального значения силы тяжести;
— моделировании нагрузок на пилота на активном участке полёта (получение информации о нагрузках на экипаж);
— исследовании режимов собственного тепловыделения АРТС на различных стадиях полёта с учётом решаемых функциональных задач.
Внедрение в космической технике АРТС позволит создать инновационную базовою технологию для освоения ближнего и дальнего космоса, отличающуюся многофункциональностью за счет широкого перечня выполняемых такими роботами операций и возможности использования их как на пилотируемых и на автоматических КА, так и напланетных базах.
Задачи эксперимента «Испытатель»:
— проведение испытаний АРТС на стойкость к ВВФ при нахождении в кресле члена экипажа ПТК (пилотируемого транспортного корабля);
— расширение объема информации, получаемой в ходе беспилотных испытаний ПТК за счет встроенных датчиков;
— демонстрация высокого потенциала отечественной науки и техники;
— моделирование типовых действий членов экипажа, таких как прием и передача голосовых сообщений, имитация работы со средствами ручного управления (пульт космонавтов, пульт ОВК), на всех этапах полета;
— сбор и передачу в ЦУП телеметрической информации о работоспособности АРТС и действующих на него нагрузках;
— отработку голосового канала связи через аппаратуру бортовой радиотехнической системы;
— дополнительный видеоконтроль объема командного отсека ВА;
— исследование возможности интеграции робототехнических систем в пилотируемые КА.
В общем, первый полет робота FEDOR (Skybot F-850) будет только пробным шагом в большом объеме испытаний и экспериментов, связанных с разработкой и использованием антропоморфных робототехнических систем.
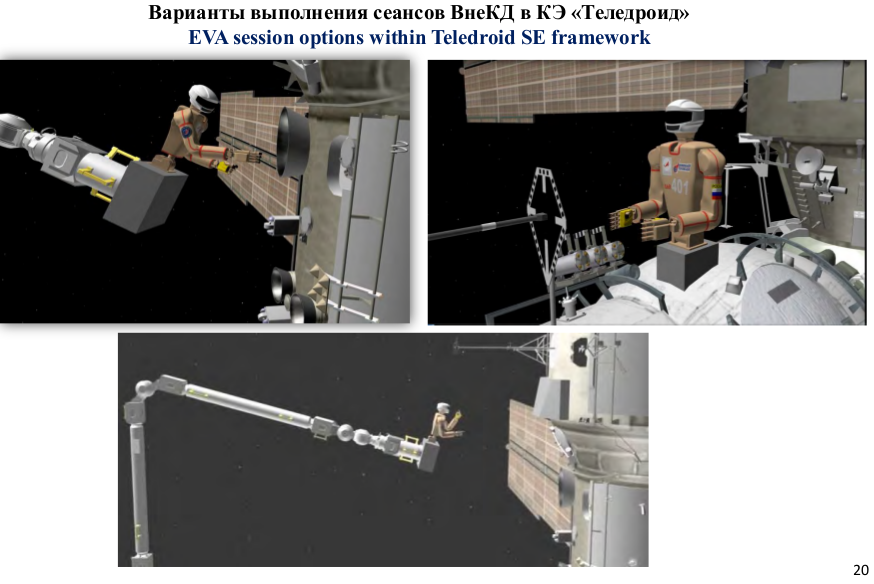
Тем более, что еще в 2015 году были интересные предпосылки этого полета робота FEDOR — эксперимент «Теледроид»: «Исследование возможностей использования дистанционно-управляемого антропоморфного робота для операционной поддержки деятельности космонавтов в условиях орбитального полета».