SCARA-Laser. Часть 1. История
Всем привет. Планирую серию статей о том, как я познавал инверсивную кинематику, SCARA модели, Marlin прошивку, Open CV и много чего ещё пока строил свой проект для олимпиады, попутно влюбившись в него.
Коротко о проекте — лазерный гравер с камерой, чтобы без участия оператора делать портреты людей. Ради эксперимента базируется на SCARA-кинематике.
Начну с истории, ведь без неё никуда. В первой статье расскажу в целом о том, кто такая эта ваша SCARA.
Selective Compliance Articulated Robot Arm — избирательная шарнирносоединённая роборука.
Чтоп, сто? Давайте разбираться. С роборукой более-менее понятно — это такое автономное устройство, по своему функционалу схожее с человеческой рукой. Шарнирносоединённая уже сложнее, но тоже терпимо. Для этого обратимся к волшебной книжке — словарь.
Шарнир — вращательная кинематическая пара — иными словами вращательная степень свободы.
Таким образом получаем, что у нашей руки не рычажная, не ещё какая-то, а именно вращательная степень свободы. Строго говоря, их может быть несколько, и о принципе их соединения как раз и упомянуто в названии. Избирательная значит каждая вращательная степень свободы робота вращается независимо от всех остальных.
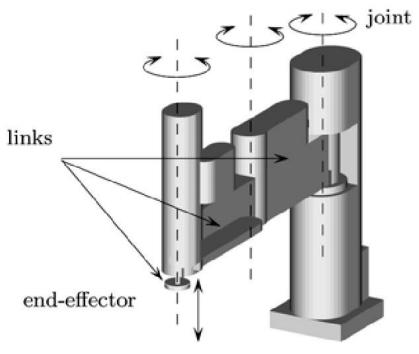
Резюмируем: SCARA — это робот с вращательными степенями подвижности, по функционалу схожий с человеческой рукой. Наглядный пример. В данном случае используется так называемая «пятирычажная» SCARA, у неё в основе два привода с несовпадающими осями и 4 рычага. Однако самые распространённые SCARA строятся на двух рычагах. Ожидаемо, принципы управления руками с разным количеством плеч понадобятся разные формулы управления.
Глобально SCARA делятся на два типа:
1) MP-SCARA — последовательное соединение плеч. Такое исполнение позволяет сделать самого робота компактнее, проще в сборке и обслуживании, но накладывает ограничения на скорости перемещения и нагрузку.
Пример последовательной SCARA
2)MORGAN-SCARA — параллельное соединение плеч. Тут уже и скорости заметно выше, и нагрузку можно давать выше, но есть один нюанс — зачастую такое решение в два раза габаритнее аналогичного последовательного.
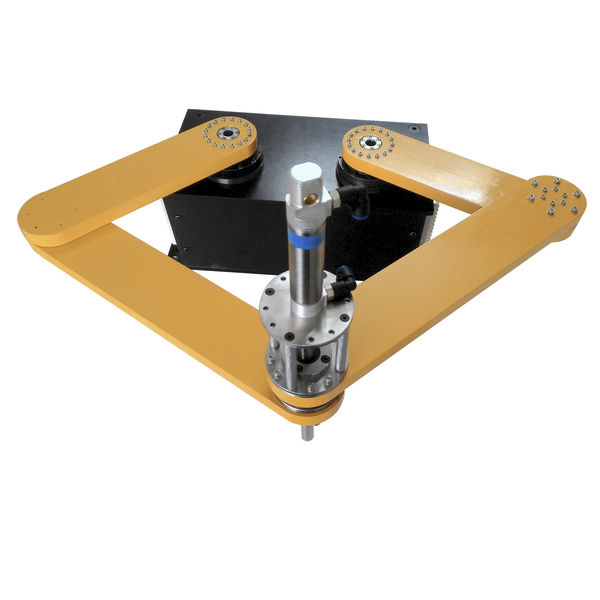
Пример параллельной SCARA.
Так, ну с тем, что SCARA из себя представляет по определению мы вроде разобрались. Два основных типа тоже посмотрели. Самое время определить, какие же плюсы у такой конструкции. для этого проведём небольшое сравнение.
Тип кинематики | Достоинства | Недостатки |
Cube | · Простота конструкции и надежность. · Хорошая точность и повторяемость из-за жесткой конструкции. · Легкость обслуживания и настройки. | · Ограниченная скорость и маневренность из-за ограниченных вариантов движения. · Большой размер и габариты, что может потребовать больше места для установки. · Менее подходит для больших объемных печатей из-за ограниченной высоты Z. |
Delta | · Высокая скорость печати благодаря параллельному движению трех стоек. · Большой объем печати по сравнению с размерами станка из-за параллельной конфигурации. · Эстетичный и компактный дизайн. | · Сложность настройки и калибровки из-за сложности кинематики. · Низкая точность и повторяемость по сравнению с некоторыми другими типами кинематики. · Высокая чувствительность к вибрациям из-за длинных стоек. |
Prusa | · Простота конструкции и сборки, что делает его популярным среди хоббистов и начинающих. · Высокая точность и повторяемость из-за прямолинейного движения. · Хорошая скорость и маневренность благодаря компактной конструкции. | · Ограниченный объем печати из-за ограничений размеров станка. · Не подходит для больших объемных печатей из-за ограниченной высоты Z. · Возможны проблемы с выравниванием и калибровкой из-за нестабильности рамы. |
SCARA | · Высокая скорость и маневренность из-за параллельного движения двух суставов. · Хорошая точность и повторяемость из-за стабильной конструкции. · Подходит для обработки трехмерных поверхностей и выполнения сложных задач. | · Сложность конструкции и настройки, что может потребовать больше времени и усилий. · Большой размер и габариты, что может потребовать больше места для установки. · Более высокая стоимость по сравнению с некоторыми другими типами кинематики. |
Нельзя сказать, что SCARA универсальная модель, но тем не менее при должной сноровке конструктора многие из её минусов нивелируются, а плюсы остаются. Для себя я выбрал последовательную SCARA с двумя плечами. Именно для этого случая в следующей статье будем выводить формулы движения. Данная модель базируется на инверсивной кинематике — пересчете углов поворота двигателей в координаты и обратно.
На этом у меня всё, надеюсь, вы узнали для себя что-то новое:-)
