Проект «робот-грузчик»: определение собственного местоположения
У моего давнего британского партнёра (именно для него два года назад писалось «Распознавание почтовых адресов») появилась новая идея по оптимизации бизнес-процессов: коробки по складу должны возить роботы, а грузчики — только перекладывать товары с робота на полку и обратно. Смысл, естественно, не в том, чтобы за каждым роботом по пятам шёл грузчик, и принимался за погрузку-разгрузку, как только робот остановится — а чтобы роботов было намного больше, чем грузчиков, и чтобы роботы большую часть времени стояли в конечной точке своего маршрута, ожидая погрузки. Тогда грузчик будет лишь переходить от одного робота к следующему, нагружая каждый, и не будет тратить рабочее время на переноску товаров.Предыстория
 В прошлом году мы экспериментировали с платформой самоходного пылесоса Roomba. Новенький пылесос обошёлся нам около £300 (подержанный можно найти за £100 и даже дешевле), и в его состав входят два электропривода на колёса, два датчика касания спереди, инфракрасный датчик снизу (для обнаружения ступенек) и сверху (для поиска зарадной станции). Точный перечень датчиков зависит от модели: в протоколе предусмотрено до четырёх инфракрасных датчиков снизу, каждый из которых возвращает один бит («пол виден/не виден»). В любом случае, никаких дальномеров: все имеющиеся датчики однобитные. Кроме того, никаких «программируемых ардуин» в Roomba нет, и чтобы им управлять, нужно установить сверху лаптоп (или ардуину), общающуюся с роботом по RS-232. Поигравшись с пылесосом вдоволь, мы так и оставили его пылиться на одной из полок склада.
В прошлом году мы экспериментировали с платформой самоходного пылесоса Roomba. Новенький пылесос обошёлся нам около £300 (подержанный можно найти за £100 и даже дешевле), и в его состав входят два электропривода на колёса, два датчика касания спереди, инфракрасный датчик снизу (для обнаружения ступенек) и сверху (для поиска зарадной станции). Точный перечень датчиков зависит от модели: в протоколе предусмотрено до четырёх инфракрасных датчиков снизу, каждый из которых возвращает один бит («пол виден/не виден»). В любом случае, никаких дальномеров: все имеющиеся датчики однобитные. Кроме того, никаких «программируемых ардуин» в Roomba нет, и чтобы им управлять, нужно установить сверху лаптоп (или ардуину), общающуюся с роботом по RS-232. Поигравшись с пылесосом вдоволь, мы так и оставили его пылиться на одной из полок склада.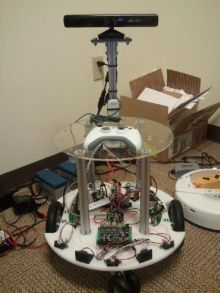 В этом году мы решили попробовать Microsoft Robotics Development Studio (MRDS), для продвижения которого Microsoft сформулировала спецификацию «MRDS Reference Platform» — набор оборудования и протокол управления «стандартным» роботом. Эта спецификация позволила бы роботолюбам создавать совместимых роботов и переносить между ними программы. По сравнению с аппаратным оснащением пылесоса, Reference Platform намного сложнее и мощнее: в спецификацию включён Kinect, три ИК-дальномера и два ультразвуковых, а также датчики вращения колёс (encoders). Реализацию MRDS RP пока что предлагает только фирма Parallax под названием Eddie (порядка £1000, не включая Kinect). Необычайное сходство Eddie с фотографиями робота-прототипа в спецификации MRDS RP наводит на мысли, что спецификация создавалась в тесном сотрудничестве с Parallax, иначе говоря — Parallax удалось добиться, что Microsoft приняли их платформу за эталонную.
В этом году мы решили попробовать Microsoft Robotics Development Studio (MRDS), для продвижения которого Microsoft сформулировала спецификацию «MRDS Reference Platform» — набор оборудования и протокол управления «стандартным» роботом. Эта спецификация позволила бы роботолюбам создавать совместимых роботов и переносить между ними программы. По сравнению с аппаратным оснащением пылесоса, Reference Platform намного сложнее и мощнее: в спецификацию включён Kinect, три ИК-дальномера и два ультразвуковых, а также датчики вращения колёс (encoders). Реализацию MRDS RP пока что предлагает только фирма Parallax под названием Eddie (порядка £1000, не включая Kinect). Необычайное сходство Eddie с фотографиями робота-прототипа в спецификации MRDS RP наводит на мысли, что спецификация создавалась в тесном сотрудничестве с Parallax, иначе говоря — Parallax удалось добиться, что Microsoft приняли их платформу за эталонную. Кроме разнообразия датчиков, Eddie обладает механически впечатляющей платформой (заявленная грузоподъёмность 20кг, а мощности моторов достаточно, чтобы толкать впереди себя складской погрузчик) и программируемым контроллером Parallax Propeller, т.е. критические куски кода можно зашить непосредственно в робота, а не только командовать им с компа.
Читать дальше →

