Регулятор для паяльника на Atmega8
Радиолюбительство — мое хобби, поэтому постоянного рабочего места нет. Обычно приходится каждый раз доставать все причендалы из шкафа, раскладывать на столе или на полу, затем каждый раз убирать. Розетка при этом в зоне работы обычно одна, сделать удлинтель все время лень, да его тоже нужно где-то хранить. А с одной розеткой напрягает проведя тест устройства питающегося от розетки, потом снова ждать минут 5 пока разогреется паяльник. Почитав интернет решил что мне нужна паяльная станция, но тратить 5–10 т.р. ради увлечения пока оказался не готов. Решение — самодельная пальная станция.
Кому интересно что получилось — прошу под кат.
Для начала за 250 рублей купил на али вот такой паяльник
Паяльник так себе, но для дома пойдет, пришлось правда жало сразу заменить, благо сейчас их на выбор по 100р штука.
Блок питания купил готовый на 60Вт 24 вольта.
Схемы опять не будет, но на печатке подписал все номиналы.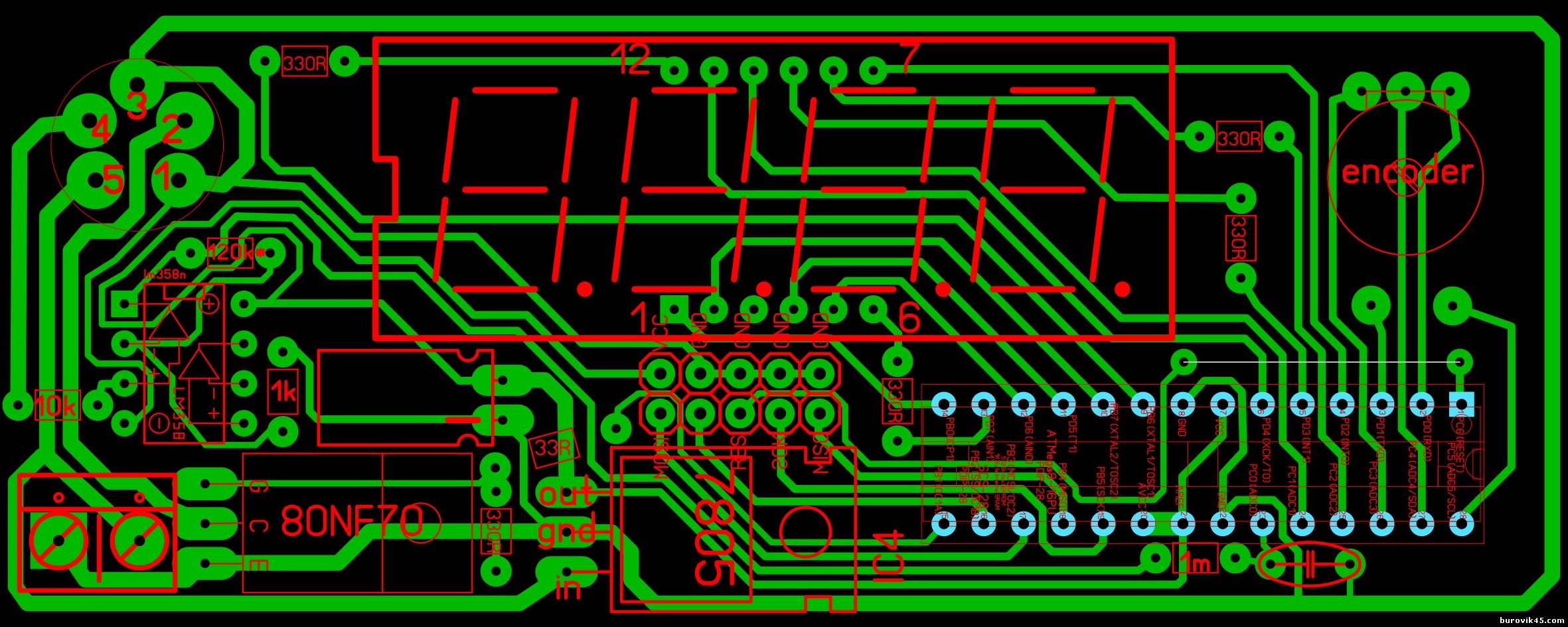
Плата в формате lay
Цель была все собрать на одной плате и как можно компактнее. Стабилизатор питания и полевик установил лежа. Устройство питается от 5 вольт и как оказалось 7805 при этом греется до 70–80 градусов, поставил небольшой радиатор, полевик не греется совсем.
Плату делал ЛУТом, получилось почти идеально:
До протравки: 
И после сборки: 
Готовый регулятор в сборе выглядит на мой взгляд даже симпатично
Если разъем для программатора не устанавливать, то плата без единой перемычки.
Как видим и деталей минимум, даже резисторов по минимуму, только на общие выводы индикатора.
Индикатор красный с большими цифрами, управление энкодером (валкодером).
Первое включение: 
От классического ПИД отказался, сделал некое его подобие, цель — минимальное время нагрева.
Если нажать вал энкодера и подержать 3 секунды можно настроить режим отображения, шаг настройки и корректировку температуры (термопары все разные).
Снял видео на телефон, качество не очень, но принцип работы понятен
Корпус, корпус… и тут родилась отличная мысль
А когда пора убирать в шкаф: 
Исходники кода для желающих повторить.
#include
#include
#include
unsigned char display_on, registr, butt1,butt2,butt3, butt3s, zamer,rezhim,mode,param,params, edit, redit, blink, wait2, wait3, wait5, wait6, wait7, rdisp, encoder_r, encoder_l, right, left, prewmode;
unsigned char ind[4],tempvar, tempmem;
float measureint, voltage_ADC,tmp;
unsigned int stop_h, stop_m, pwm_d, measure, pmeasure;
int pwm,tempch;
//unsigned int voltage_ADC;
unsigned char param1[10];
unsigned char param1eeprom[10] EEMEM;
uint16_t tempset,measure; uint16_t tem EEMEM;
unsigned char pwm_m[455] EEMEM;
ISR (TIMER0_OVF_vect)
{
if(display_on==1)
{
PORTB |= (1 << PB6); PORTD |= (1 << PD7); PORTD |= (1 << PD3); PORTC |= (1 << PC2);
PORTB &=~ (1 << PB0); //1
PORTC &=~ (1 << PC1); //2
PORTD &=~ (1 << PD4); //3
PORTD &=~ (1 << PD2); //4
PORTD &=~ (1 << PD5); //5
PORTB &=~ (1 << PB7); //6
PORTD &=~ (1 << PD6); //7
}
if(display_on==37)
{
if(ind[registr]==0 || ind[registr]==6 || ind[registr]==9) {display_on=display_on+20;} //6 сегментов
if(ind[registr]==2 || ind[registr]==3 || ind[registr]==5 || ind[registr]=='P') {display_on=display_on+25;} //5 сегментов
if(ind[registr]==4 || ind[registr]=='g') {display_on=display_on+35;} //4 сегмента
if(ind[registr]==7) {display_on=display_on+40;} // 3 сегмента
if(ind[registr]==1) {display_on=display_on+45;} //2 сегмента
if(ind[registr]=='-') {display_on=display_on+50;} //2 сегмента
if(registr==0) { PORTB &=~ (1 << PB6);}
if(registr==1) { PORTD &=~ (1 << PD3);}
if(registr==2) { PORTC &=~ (1 << PC2);}
if(registr==3) { PORTD &=~ (1 << PD7);}
if (ind[registr]==0) {PORTB |= (1 << PB0);PORTC |= (1 << PC1);PORTD |= (1 << PD4);PORTD |= (1 << PD2);PORTD |= (1 << PD5);PORTB |= (1 << PB7);}//0
if (ind[registr]==1) {PORTD |= (1 << PD2);PORTD |= (1 << PD5);}//1
if (ind[registr]==2) {PORTB |= (1 << PB0);PORTD |= (1 << PD4);PORTD |= (1 << PD2);PORTB |= (1 << PB7); PORTD |= (1 << PD6);}//2
if (ind[registr]==3) {PORTD |= (1 << PD4);PORTD |= (1 << PD2);PORTD |= (1 << PD5);PORTB |= (1 << PB7); PORTD |= (1 << PD6);}//3
if (ind[registr]==4) {PORTC |= (1 << PC1);PORTD |= (1 << PD2);PORTD |= (1 << PD5);PORTD |= (1 << PD6);}//4
if (ind[registr]==5) {PORTC |= (1 << PC1);PORTD |= (1 << PD4);PORTD |= (1 << PD5);PORTB |= (1 << PB7); PORTD |= (1 << PD6);}//5
if (ind[registr]==6) {PORTB |= (1 << PB0);PORTC |= (1 << PC1);PORTD |= (1 << PD4);PORTD |= (1 << PD5);PORTB |= (1 << PB7); PORTD |= (1 << PD6);}//6
if (ind[registr]==7) {PORTD |= (1 << PD4);PORTD |= (1 << PD2);PORTD |= (1 << PD5);}//7
if (ind[registr]==8) {PORTB |= (1 << PB0);PORTC |= (1 << PC1);PORTD |= (1 << PD4);PORTD |= (1 << PD2);PORTD |= (1 << PD5);PORTB |= (1 << PB7); PORTD |= (1 << PD6);}//8
if (ind[registr]==9) {PORTC |= (1 << PC1);PORTD |= (1 << PD4);PORTD |= (1 << PD2);PORTD |= (1 << PD5);PORTB |= (1 << PB7); PORTD |= (1 << PD6);}//9
if (ind[registr]=='P') {PORTB |= (1 << PB0);PORTC |= (1 << PC1);PORTD |= (1 << PD4);PORTD |= (1 << PD2);PORTD |= (1 << PD6);}//P
if (ind[registr]=='g') {PORTC |= (1 << PC1);PORTD |= (1 << PD4);PORTD |= (1 << PD2); PORTD |= (1 << PD6);}//g
if (ind[registr]=='-') {PORTD |= (1 << PD6);}//-
if (ind[registr]=='F') {PORTB |= (1 << PB0);PORTC |= (1 << PC1);PORTD |= (1 << PD4); PORTD |= (1 << PD6);}//F
if (ind[registr]=='n') {PORTB |= (1 << PB0);PORTD |= (1 << PD5); PORTD |= (1 << PD6);}//n
registr++;
if (registr>3){registr=0;}
}
display_on++;
if (display_on>100){display_on=1;blink++; if(blink>250){blink=0;} ADCSR |= (1<250){wait2=0;}}
if(wait2==250){wait3++; if(wait3>250){wait3=251;}; butt3s++; if(butt3s>250){butt3s=251;}; wait5++;wait6++;}
if(wait3==3 && mode==1){mode=0;}
if(wait5==20){wait5=0;}
if(wait5==51){wait5=0;}
if(wait5==50){wait6++; if(wait6==250){wait6=0;};if(wait6==param1[3]){rezhim=0;}}
}
void init_pwm (void)
{
TCCR1A|=(1<0) {ind[0]=measure/100;ind[1]=measure%100/10;ind[2]=measure%10;ind[3]='g';}
if(param1[0]==0)
{
if(tempset<100){ind[0]=-1;} else {ind[0]=tempset/100;}
if(tempset<10) {ind[1]=-1;} else {ind[1]=tempset%100/10;}
ind[2]=tempset%10;ind[3]='g';
}
}
if(mode==1)
{
if(blink<170)
{if(tempset<100){ind[0]=-1;} else {ind[0]=tempset/100;}
if(tempset<10) {ind[1]=-1;} else {ind[1]=tempset%100/10;}
ind[2]=tempset%10;ind[3]='g';
}
if(blink>170){ind[0]=-1;ind[1]=-1;ind[2]=-1;ind[3]=-1;}
}
}
if(tempmem==0)
{
if(wait5==10)//5=10 секунд
{
if(tempch==0 && tempset==measure && eeprom_read_byte(&pwm_m[tempset])!=pwm)
{eeprom_write_byte(&pwm_m[tempset],pwm); tempmem=1; ind[0]='g';ind[1]='g';ind[2]='g';}
if(tempset!=measure)
{
pwm_d=tempset-measure;
pwm=pwm+pwm_d;
}
wait5=0;tempch=0;
}
if(pmeasuremeasure && tempset>measure) //температура меньше установленно и наблюдается снижение
{
pwm_d=tempset-measure; tempch++;
pwm=pwm+pwm_d*measure/100;
pmeasure=measure;
}
}
if(wait5==10 && tempmem==1)//5=10 секунд
{
if(tempsetmeasure){pwm=pwm+1;}
if(tempset==measure && eeprom_read_byte(&pwm_m[tempset])>pwm && eeprom_read_byte(&pwm_m[tempset])-pwm>5){eeprom_write_byte(&pwm_m[tempset],pwm);}
if(tempset==measure && eeprom_read_byte(&pwm_m[tempset])>pwm && eeprom_read_byte(&pwm_m[tempset])-pwm>5){eeprom_write_byte(&pwm_m[tempset],pwm);}
wait5=0;
if(tempset==measure && tempmem==1 && (int)(voltage_ADC*param1[2]/100)%zamer<50){tmp=tmp-10;}
if(tempset==measure && tempmem==1 && (int)(voltage_ADC*param1[2]/100)%zamer>50){tmp=tmp+10;}
}
if(pwm>250){pwm=250;} if(pwm<0){pwm=0;}
if(tempset-10>measure && tempmem==1){OCR1A=0;wait5=0;wait6=0;} else {OCR1A=27000+tmp-pwm*108;}
voltage_ADC=0;zamer=0;
}
zamer++;
if (rezhim!=1) {OCR1A=27000;}
if (measure>480) {OCR1A=27000;rezhim=0;OCR1A=27000;}
//ADCSR |= (1<500){tempset=100;}
param1[0] = eeprom_read_byte(¶m1eeprom[0]); if(param1[0]>1){param1[1]=1;}
param1[1] = eeprom_read_byte(¶m1eeprom[1]); if(param1[1]>10){param1[1]=5;}
param1[2] = eeprom_read_byte(¶m1eeprom[2]); if(param1[2]>250){param1[2]=75;}
param1[3] = eeprom_read_byte(¶m1eeprom[3]); if(param1[3]>250){param1[3]=10;}
pwm=eeprom_read_byte(&pwm_m[tempset]); if (pwm<255){tempmem=1;}
while (1) //Вечный цикл
{
if(tempset<100){tempset=100;} if(tempset>450){tempset=450;}
//кнопка энкодера
if ((PINC&(1<200){butt1=201;}} else {butt1=0;}
if(butt1==200 && rezhim==0){butt3s=0; rezhim=1; butt1=201;}
if(butt1==200 && rezhim==1){butt3s=0; rezhim=0; butt1=201;}
if(butt1==200) {butt3s=0;}
if (butt1==201 && butt3s==2 && rezhim!=2){rezhim=2;butt3s=10;}
if (butt1==201 && butt3s==2 && rezhim==2){rezhim=0;butt3s=10;}
//Поворот энкодера
if ((PIND&(1<encoder_l){butt2=encoder_l+1;}} else {butt2=0;}
if ((PINC&(1<encoder_l){butt3=encoder_l+1;}} else {butt3=0;}
if(right==1 || left==1){right=0; left=0;}
if(encoder_r==0)
{
if(butt2==encoder_l+1 && butt3==encoder_l) {encoder_r=encoder_l*5;mode=1;wait3=0;right=1;}
if(butt3==encoder_l+1 && butt2==encoder_l) {encoder_r=encoder_l*5;mode=1;wait3=0;left=1;}
}
if(encoder_r==0){encoder_r=1;} encoder_r--;
if(mode!=prewmode){prewmode=mode; eeprom_write_word(&tem, tempset);}
if(rezhim==0)
{
if(blink<170){ind[0]=-1; ind[1]=-1; ind[2]=-1; ind[3]=-1;}
if(blink>170){ind[0]='-'; ind[1]='-'; ind[2]='-'; ind[3]='-';}
}
if(rezhim==1)
{
if(right==1) {tempset=tempset+param1[1];pwm=eeprom_read_byte(&pwm_m[tempset]); if (pwm<255){tempmem=1;tmp=0;}else{tempmem=0;pwm=1;tmp=0;} }
if(left==1){tempset=tempset-param1[1];pwm=eeprom_read_byte(&pwm_m[tempset]); if (pwm<255){tempmem=1;tmp=0;}else{tempmem=0;pwm=1;tmp=0;} }
}
if(rezhim==2)
{
if(butt1==200){if(edit==0){edit=1;tempvar=-1;} else {edit=0; eeprom_write_byte(¶m1eeprom[params], param1[params]);} }
if(edit==0)
{
ind[0]='P'; ind[1]=params; ind[2]=-1; ind[3]=-1;
if(right==1){params++;}; if(left==1){params--;}
if(params<0){params=0;}; if(params>3){params=3;}
}
if(edit==1)
{
if(blink==1 || tempvar!=param1[params])
{
if(param1[params]<100){ind[0]=-1;} else {ind[0]=param1[params]/100;}
if(param1[params]<10) {ind[1]=-1;} else {ind[1]=param1[params]%100/10;}
ind[2]=param1[params]%10;
}
if(blink>170){ind[0]=-1;ind[1]=-1;ind[2]=-1;ind[3]=-1;}
tempvar=param1[params];
if(right==1){param1[params]++;};if(left==1){param1[params]--;}
if(param1[params]<0){param1[params]=0;} if(param1[params]>250){param1[params]=1;}
if(params==0) {if(param1[params]<0){param1[params]=0;} if(param1[params]>1){param1[params]=1;}}
if(params==1) {if(param1[params]<1){param1[params]=1;} if(param1[params]>50){param1[params]=50;}}
if(params==2) {if(param1[params]<0){param1[params]=0;} if(param1[params]>250){param1[params]=250;}}
if(params==3) {if(param1[params]<0){param1[params]=0;} if(param1[params]>250){param1[params]=250;}}
}
}
} //loop
} //main
