Разработка угловой стабилизации квадрокоптера
Данная статья скорее логическое продолжение моей статьи о балансере: «Создание робота балансера на arduino».В ней будут очень кратко освещены: простая модель угловой стабилизации квадрокоптера с использованием кватернионов, линеаризация, построение управления для объекта и проверка его в Matlab, а так же проверка на реальном объекте. В качестве подопытного будет выступать Crazyflie 1.0.Сейчас оно летает так (на момент съемок я не очень правильно выставил управление):
[embedded content]
Построение динамической системыВведем 2 системы координат: локальную, привязанную к земле, и вторую, связанную с коптером.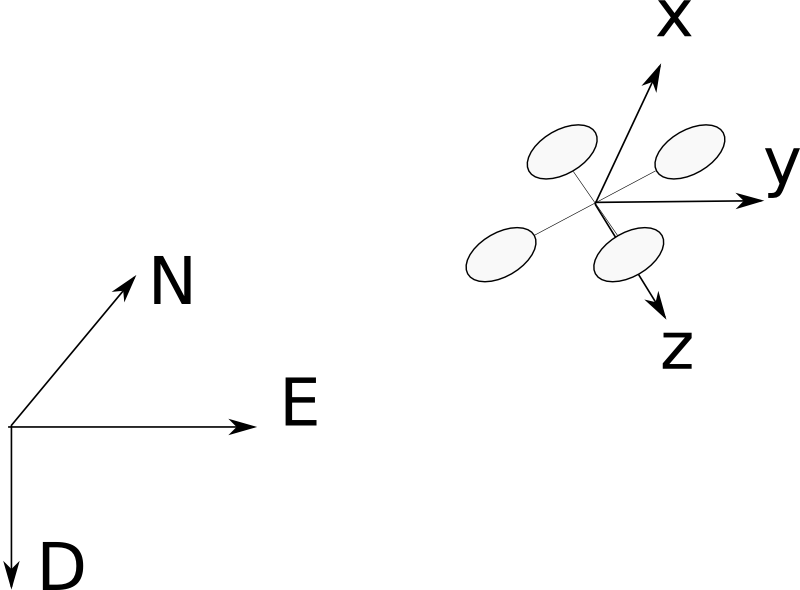
Вращение тела удобнее представлять, используя кватернионы, в связи с меньшим количеством необходимых вычислений. О них написано много статей, в том числе и на хабре. Я рекомендую к прочтению книгу «Бранец В.Н., Шмыглевский И.П. Применение кватернионов в задачах ориентации», спасибо Slovak из центра компетенций Matlab за подсказку.
Воспользуемся основным законом динамики вращательного движения:
 , где
, где — моменты, действующие на тело, I — тензор инерции, а
— моменты, действующие на тело, I — тензор инерции, а — угловые скорости по главным осям (в связанной системе координат).Таким образом:
— угловые скорости по главным осям (в связанной системе координат).Таким образом:  .
.
В силу теоремы о приведении тензора инерции к главным осям, тензор инерции представим в виде:  .
.
Внешние моменты определим через управления:  , где
, где
Таким образом, уравнения угловых скоростей в связанной системе координат: 
Замечу, что если бы мы учитывали положение коптера, можно было бы не вводить отдельные функции управлений, а сразу использовать в качестве них силы тяги, что удобнее и быстрее при расчетах. В данном случае система стабилизации не имеет никаких данных о необходимой сумме сил тяги, поэтому необходимо использовать именно такие управления…
Сила тяги пропеллера может быть примерно описана как  . Тогда уравнения можно записать через угловые частоты пропеллеров, если вы сможете управлять напрямую частотой моторов и знаете конкретное b:
. Тогда уравнения можно записать через угловые частоты пропеллеров, если вы сможете управлять напрямую частотой моторов и знаете конкретное b:  где
где — углы эйлераЗамечу, что подбор коэффициента b у меня произведен вручную, простым подбором.
— углы эйлераЗамечу, что подбор коэффициента b у меня произведен вручную, простым подбором.
Также необходимо выписать уравнение для кватерниона вращения. Из свойств кватернионов следует, что , где являются угловыми скоростями в связанной с ЛА системе координат, в ней гироскопы измеряют угловую скорость [1].
, где являются угловыми скоростями в связанной с ЛА системе координат, в ней гироскопы измеряют угловую скорость [1].
Попробуем стабилизировать только углы и угловые скорости: 
Или подробнее
Введем вектор пространства состояний:  .Необходимо заметить, что если в вектор пространства входит компонента
.Необходимо заметить, что если в вектор пространства входит компонента  система перестает быть управляемой. Однако мы можем считать, что
система перестает быть управляемой. Однако мы можем считать, что  и убрать ее из вектора состояний, тем самым уменьшив количество координат [2].
и убрать ее из вектора состояний, тем самым уменьшив количество координат [2].
Вектор управлений:  ,
,
Система представима в стандартном виде
 .
.
В нашем случае
 , а
, а
Линеаризация и построение управления
Линеаризируя систему вблизи начала координат получим следующие матрицы A и B:  ,
,
Как и в прошлый раз используем линейно-квадратичный регулятор. Напомню команду Matlab для его расчета:
[K, S, e]=lqr (A, B, Q, R)
Матрицы Q и R являются весовыми матрицами. Q штрафует за отклонение от нуля, а R за расход энергии управлением.В результате получили матрицу K. В моей матрице коэффициентов все недиагональные элементы были очень малы (порядка 10^-4) и я не стал учитывать их.Напомню, что для получения управления необходимо умножить матрицу K на вектор X. Конечно, в коде можно не вводить понятие матрицы и просто умножить каждую координату на некоторый коэффициент для быстродействия.Проверка модели
Для проверки полученных результатов была создана модель в Matlab. Запустим ее с ненулевыми начальными условиями.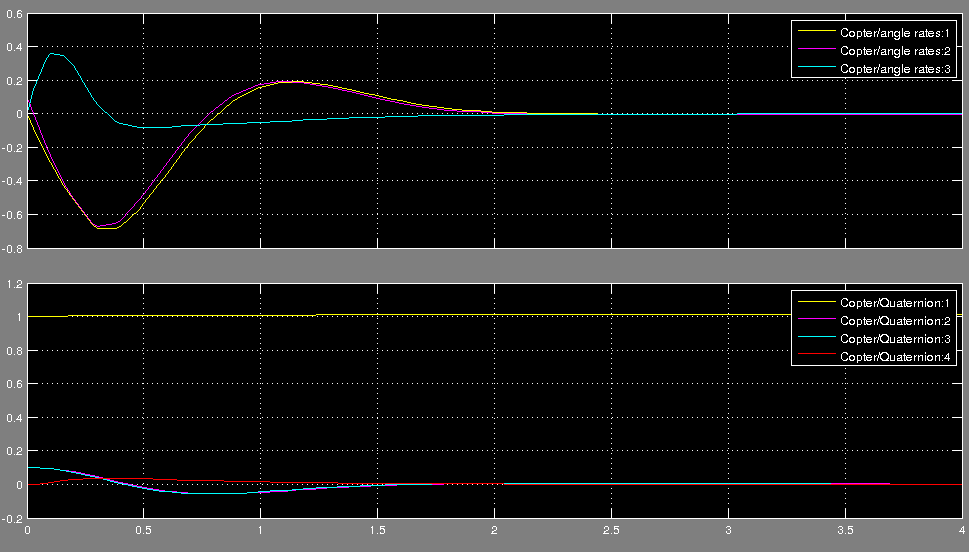
Первый график показывает как ведут себя угловые скорости, второй — изменение составляющих кватерниона. Заметьте, что скалярная величина кватерниона приходит в единицу, не смотря на то, что она не входит в уравнения линеаризованной системы. Как видно из графиков — модель стабилизируется.
Код
Crazyflie использует систему Free RTOS, где весь код разбит на модули, нас интересует код sensfusion6.c и stabilizer.c. К счастью, фильтрация показаний акселерометра и гироскопа производится в кватернионах, проблема заключается в том, что сенсоры на коптере расположены для + схемы. Модель же я рассчитывал для X схемы. Отличие заключается только в выборе управлений U1 и U2.
Необходимо добавить код получения кватерниона в sensfusion6.c:
void sensfusion6GetQuaternion (float* rq0, float* rq1, float* rq2, float* rq3){ *rq0=q0; *rq1=q1; *rq2=q2; *rq3=q3; } Я не стал добавлять отдельный модуль для LQR регулятора, вместо этого я изменил stabilizer.c. Да, возможно, это и не самый интеллигентный способ, однако для проверки модели он подойдет.
Начать стоит с добавления переменных текущего и желаемого положения аппарата, а так же управлений:
static float q0Actual; static float q1Actual; static float q2Actual; static float q3Actual;
static float q1Desired; static float q2Desired; static float q3Desired;
int16_t actuatorU1; int16_t actuatorU2; int16_t actuatorU3; Желаемое положение по q0 не указываем в силу того, что нам не нужно его стабилизировать.
Произведем изменения в код получения команд. Коптер получает угол в градусах, математически правильнее сделать так:
сommanderGetRPY (&q1Desired, &q2Desired, &q3Desired); q1Desired=cos ((q1Desired/2+90)*0.01745);//*3.14/180/2; q2Desired=cos ((q2Desired/2+90)*0.01745); q3Desired=cos ((q3Desired/2+90)*0.01745); Изменим «быстрый» цикл (250Гц) стабилизатора:
sensfusion6UpdateQ (gyro.x, gyro.y, gyro.z, acc.x, acc.y, acc.z, FUSION_UPDATE_DT); sensfusion6GetEulerRPY (&eulerRollActual, &eulerPitchActual, &eulerYawActual); sensfusion6GetQuaternion (&q0Actual, &q1Actual,&q2Actual,&q3Actual); sensfusion6UpdateP (FUSION_UPDATE_DT); sensfusion6UpdateV (acc.x, acc.y, acc.z, FUSION_UPDATE_DT);
actuatorU1=50*(1*(-gyro.x)+245*(q1Actual-q1Desired)); actuatorU2=50*(1*(gyro.y)-200*(q2Actual-q2Desired)); actuatorU3=50*(1.5*(gyro.z)+0*(q3Actual-q3Desired)); Подбор коэффициентов произведен опытным путем, так как не было возможности узнать зависимость между посылаемой на моторы командой и силой, которую выдает мотоустановка.Также я изменил функцию распределения мощностей моторов:
static void distributePower (const uint16_t thrust, const int16_t u2, const int16_t u3, const int16_t u4) { motorPowerM1=limitThrust ((thrust/4+u3/2+u4/4)*5); motorPowerM2=limitThrust ((thrust/4-u2/2-u4/4)*5); motorPowerM3=limitThrust ((thrust/4-u3/2+u4/4)*5); motorPowerM4=limitThrust ((thrust/4+u2/2-u4/4)*5);
motorsSetRatio (MOTOR_M1, motorPowerM1); motorsSetRatio (MOTOR_M2, motorPowerM2); motorsSetRatio (MOTOR_M3, motorPowerM3); motorsSetRatio (MOTOR_M4, motorPowerM4); } Заключение Исходя из того, что коптер стабилизирует свои углы, можно заключить, что математическая модель разработана верно. К сожалению, пока нет возможности получать свои координаты и скорости (интегрирование акселерометра дает огромную ошибку), поэтому коптер не гасит начальную скорость и не возвращается в начальную позицию.Для решения этой задачи MIT, например, использует камеры и метки на своих коптерах.Дополнительные материалы и источники Бранец В.Н., Шмыглевский И.П. «Применение кватернионов в задачах ориентации» Yaguang Yang «Analytic LQR Design for Spacecraft Control System Based on Quaternion Model» Ветка модифицированной прошивки на github P.S. К сожалению, не могу поделиться моделью, а так же рассказать о расширенной модели с автопилотом и координатной стабилизацией в силу того, что это является частью моего будущего диплома, а все дипломы теперь проверяются на новизну и антиплагиат.P.P. S. Я публикую данную статью на хабре, а не на новом GT в связи с тем, что остальные мои статьи схожей тематики остались именно на хабре.
