Разработка гексапода своими руками с нуля (часть 2)
Всем привет! Подошло время для второй части разработки гексапода SKYNET. В данной статье я расскажу как я собрал корпус и об ошибках при его проектировании. Так же будет демонстрация работы конечности и первый самостоятельный подъем с брюха.
ALARM: Будет много картинок.

Корпус будет немного отличаться от модели из первой части, так как модель является улучшенной версией собираемого корпуса.
Как упоминалось в первой части, в качестве материала будет использоваться фанера 3 мм. Сделал заказ лазерной резки по чертежам из и спустя 2 дня модель из экрана перешла ко мне на стол, правда по частям.

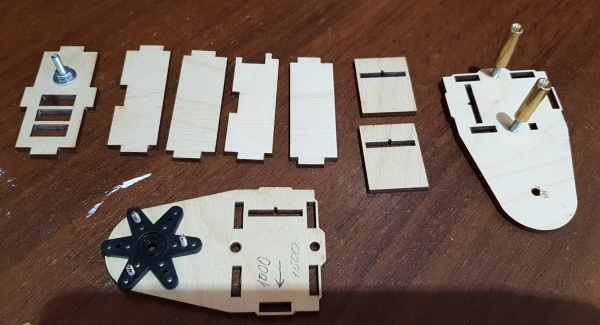
Меня это не остановило и начался длительный процесс сборки, который занял приблизительно часа 3 — 4. Перед сборкой лучше сделать сортировку деталей, так намного удобнее собирать.

Сборка конечностей
for (uint32_t i = 0; i < 6; ++i) {
Звено 1
Начать я решил со сборки 1 звена конечности. Для этого потребуются следующие детали:
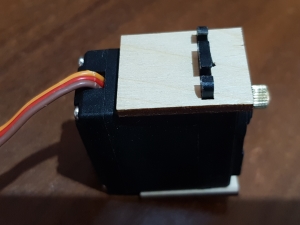
Ах да, нам еще понадобится сервопривод. На него необходимо установить 2 «подушки», которыми он будет фиксироваться в корпусе. Перепутать стороны очень сложно, в подушках есть специальный вырез под уголок на ушках сервопривода.
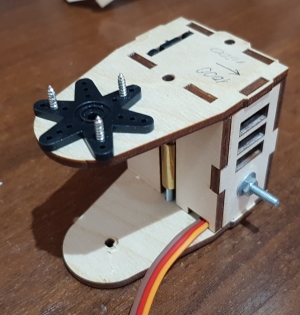
Далее ставим полученную сборку на нижнюю часть звена в специальный вырез и устанавливаем остальные детали в соответствии с моделью. Ось сервопривода должна совпадать с осью винта на другой стороне. Установку необходимо делать очень аккуратно без особых усилий, чтобы не испортить пазы. Получился следующий результат:

В конце ставим верхнюю часть звена, затягиваем винты и звено готово.
Звено 2
После поглощения пары кружек с чаем пришло время сборки второго звена. С виду собрать легко, но это самая рутиная часть. Для сборки понадобятся детали, показанные ниже. Кстати самая рутиная часть уже сделана — прикручены качалки для сервоприводов. И да, небольшой совет: закручивать саморезы быстрее всего плоскогубцами, крутя при этом саму деталь.

Дальше по сборке проблем быть не должно. Делаем все в соответствии с моделью и должно получится так:

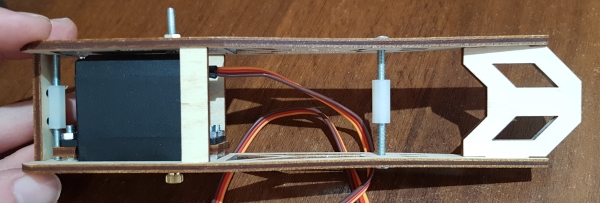
Звено 3
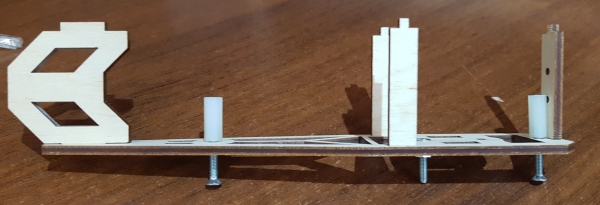
Наконец-то мы подошли к последнему звену будущей конечности. Необходимые детали для сборки набираем в соответствии с моделью и начинаем сборку каркаса:
Теперь нам понадобится сервопривод и подушки для него. Установить их необходимо следующим образом (для второго ушка сервопривода делаем так же).

Далее устанавливаем сервопривод в каркас и крепим его при помощи винтов. Так же устанавливаем вторую часть звена и затягиваем все винты. В данном случае я решил установить ось сервопривода ближе к центру звена — так лучше смотрится.
Наконец-то сборка всех деталей конечности i завершена
}
После завершения цикла сборки деталей конечностей, нужно соединить всё вместе. Думаю процесс надевания качалок на оси сервоприводов не нужно описывать. Должно получиться так:

Видео работы одной из конечностей:
Сборка рамы
Данная часть является самой простой и в подробных комментариях думаю не нуждается. Для сборки рамы нам понадобятся все оставшиеся детали. Сборку я решил начать с крышек, так как они собираются с участием клея и пока я буду собирать раму, клей уже высохнет (надеюсь).
Крышки собираются очень просто и перепутать там что-либо трудно. Должно получится так (нижняя крышка):

Как видно я залил клеем все места соединения деталей, чтобы вся эта конструкция не развалилась. Кстати, на удивление она оказалась довольно прочной. Верхняя крышка собирается аналогично, только при её сборки главное не перевернуть название гексапода.
После сборки крышек пора приступать к сборке рамы. Сервоприводы к верхней части крепятся на прямую без подушек и затягиваются моими любимыми винтами и гайками М3. Далее ставим широкие и узкие стойки в пазы и цепляем нижнюю часть. Потом затягиваем все это дело винтами и радуемся результату (не смейтесь над отверткой, она многое пережила).
В раме стоят сервоприводы S3003, так как партия MG996R из 6 штук пока, что в пути, но размеры у них одинаковые.

После сборки рамы устанавливаем крышки на свои места, но их приклеивать не нужно. Выглядит это круто.

Результат
И теперь момент истины — установка всех ног на свои места. Думаю установить их на оси сервоприводов не составит труда. Результат ну просто шикарен:
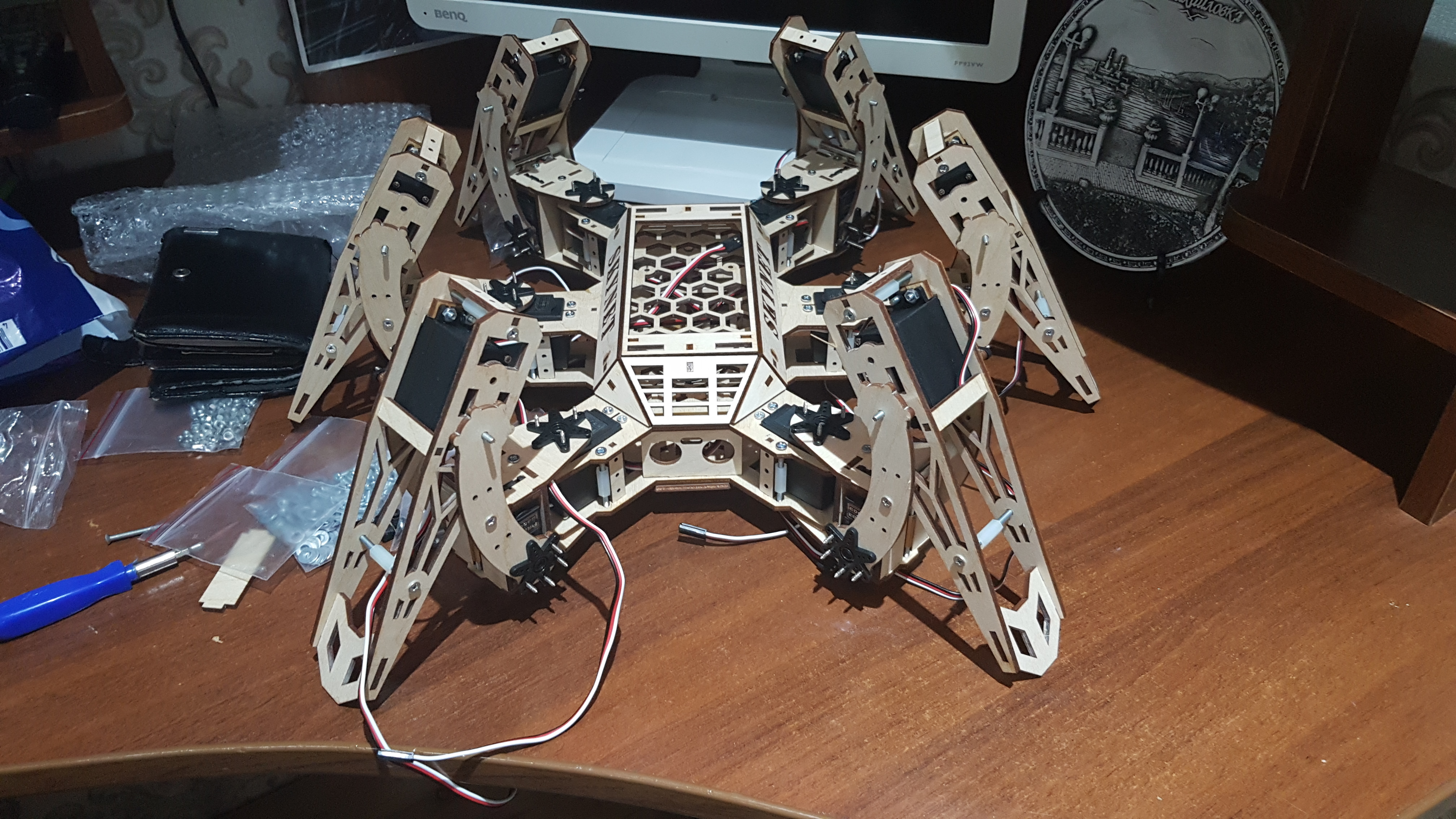
Да, он умеет вставать. Радости в этот момент было крайне много. Код писался на скорою руку, чтобы понять сможет ли он хотя бы встать. В сборке на видео везде стоят сервоприводы S3003, так как оно было снято до перехода на MG996R.
Грабли, тяпки и мотыги на которые я наступил
- Сервоприводы. Решил взять самые дешевые S3003 по 100 руб на шутку и пожалел об этом. Усилия хватает с запасом, но вот люфт это ужас. Ось сервопривода можно спокойно повернуть примерно на 10 градусов в любую сторону, при этом он не делает никаких попыток удержать положение. Если крутить больше, то он будет сопротивляться. И никаких плавных движений с ними реализовать невозможно.
- Неверное расположение опор. В результате этого в некоторых местах детали прогибаются при затяжке, особенно это заметно на 3 звене конечности.
- Чем больше кусок фанеры, тем сильнее он деформирован, особенно это заметно в раме. В итоге некоторых местах наблюдаются щели.
Решение: добавил по краям пару отверстий под винты
- Подшипники. Да, нужно было поставить подшипники. Эта мотыга черенком по ноге пока не стукнула, но я чувствую, что она приближается. Осевые отверстия быстро изотрутся под нагрузкой и будут люфтить.
Планы
В следующих статьях планирую рассказать про электронику робота и его базовую математику
