Puppet Project (проект «Марионетка»)
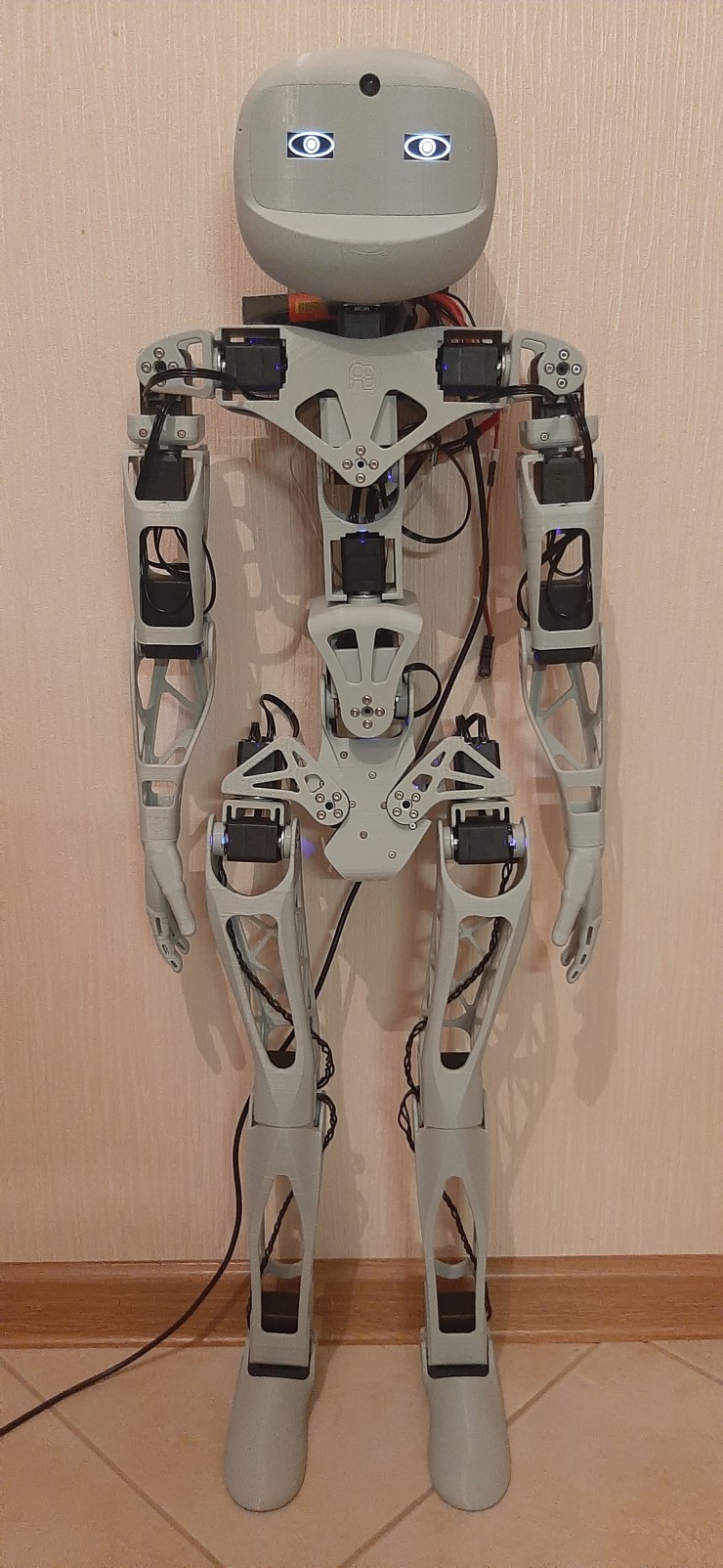
Всем доброго времени суток! Хочу поделиться с Вами своей радостью, сбылась моя давняя мечта, я наконец-то закончил сборку своего робота.
Всё началось в середине 2018 года, нашёл интересный проект под названием Poppy Project. Загорелся идеей собрать такого робота для себя, но после детального изучения выяснилось, что в проекте используются сервоприводы DYNAMIXEL, которые стоят не мало, т.к. их нужно 25 шт., то только за моторы получалась кругленькая сумма. Было принято решение заменить их аналогами, более приемлемыми по цене. После долгих поисков был найден сервопривод LX-16A, по техническим характеристикам и габаритам он подходил, но конечно же отличался посадочными местами, тут и началось самое сложное. Начался долгий процесс в SolidWorks по доработке деталей робота под новый сервопривод. Форма и размеры деталей не изменялись, дорабатывались и изменялись только посадочные места под моторы.
Характеристики сервопривода LX-16A
Вес | 54 г |
Размеры | 45.22 мм x 24.72 мм x 36.3 мм |
Скорость | 0.19сек/60° при 7.4V |
Точность | 0.3° |
Крутящий момент | 17 кг/см при 6V; 19.5 кг/см при 7.4V |
Минимальный рабочий ток | 1A |
Ток холостого хода | 100mA |
Ток остановки | 2.4~3A |
Диапазон регулирования | 0~1000 соответствует 0°~240° |
Скорость передачи данных | 115200 |
Обратная связь с данными | Температура; напряжение; положение |
Возможности | Сохранение данных при выключении питания; защита от перегрева; функция обратного считывания |
После доработки всех деталей и подбора необходимых метизов, последовал процесс 3D-печати. Печатал PLA пластиком. Было много проб и ошибок, в итоге на всё ушло три катушки пластика диаметром 1.75 мм по 1000 г.
Несколько фото процесса печати
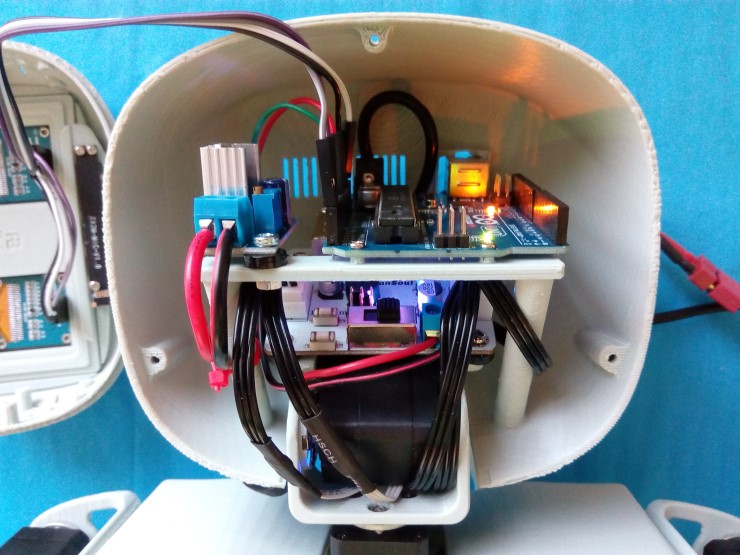
Дальше началась сборка, подключение и настройка моторов. В голове размещаются все электронные компоненты: Arduino UNO, Serial Bus Servo Controller, OLED 128×64 — 2 шт., LM317 DC-DC и камера.

В данный момент управление роботом осуществляется через сервоконтроллер в программе Lobot Bus Servo Control, но так же можно подключить Arduino к сервоконтроллеру и она будет им управлять.

Помимо привычного управления сервоприводами — выставление скорости и нужного угла поворота, есть интересная функция — можно в программе разблокировать моторы, вручную установить в необходимую позицию и считать текущие углы, очень удобно для создания движений.
Фото робота
P.S. Огромная благодарность Демидову Дмитрию за работу в SolidWorks и Сапрунову Юрию за 3D-печать.
