Пульт дистанционного управления из смартфона
В двух предыдущих статьях я рассказал об использовании смартфона для управления игрушечным автомобилем, как непосредственно голосом, так и с использованием другого смартфона по блютус. Но управление было примитивным — отдавалась команда, автомобиль выполнял команду, останавливался и ждал следующей команды. Это было связано с большой скоростью движения автомобиля для комнатных условий (приблизительно 1,2 м/с), а так же с продолжительным временем отдания команды и невозможностью оперативно вмешиваться в движение, используя меню. Даже штатный пульт ДУ не давал возможности управления. В новой версии ДУ с графическим интерфейсом я решил применить ШИМ для регулировки скорости и имитировать управление рулем.

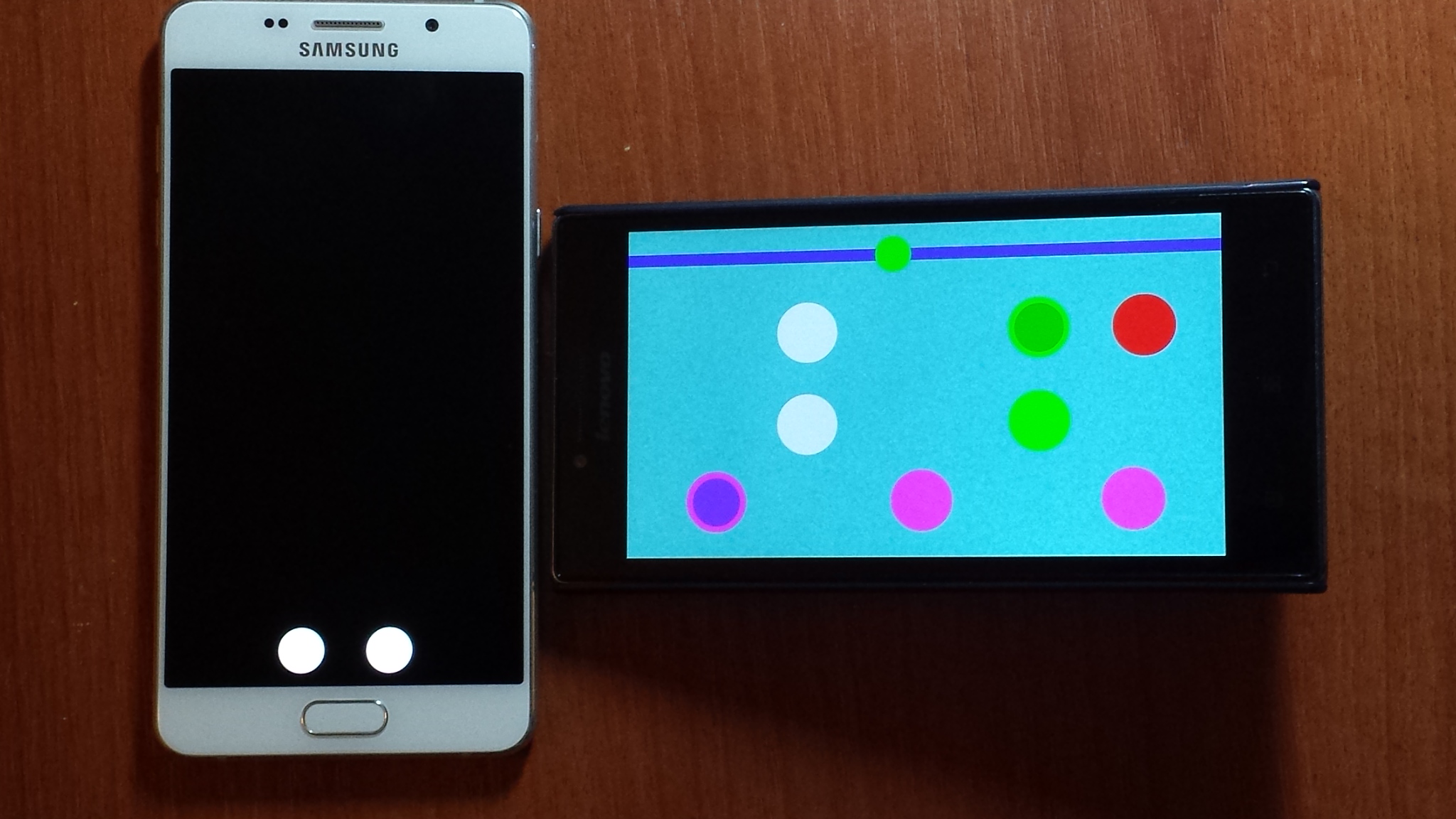
На картинке показана машинка, которой управляет смартфон, и ниже смартфон с работающей программой дистанционного управления по блютус.
В верхней части экрана находится ползунок (зеленый кружок), перемещаемый пальцем.

При снятии пальца с экрана относительное расстояние от слайдера до левой границы экрана передается управляющему смартфону, где и формируется широтная модуляция импульсного сигнала.
GR.GET.POSITION c1, xx, yy
r6=(xx-xc)*(xx-xc)+(yy-yc)*(yy-yc)
IF r6
Наименьшая скважность сигнала 20%, наибольшая 80%. Теоретическая возможная частота 10 Гц. На самом деле наверное около 4 — 5 Гц, поскольку сигналы на модуляцию идут в общем потоке команд и некоторые из них также имеют временную задержку. Поэтому при низкой скважности хорошо заметна вибрация.
Две зеленых кнопки — верхняя движение вперед, нижняя назад. Справа красная кнопка — стоять на месте. Две белых кнопки — остановка программ пульте ДУ и на машинке. В нижней части экрана три фиолетовых кнопки выбора направления движения влево, прямо и вправо. При
включении, соответствующего режима, в центре кнопки появляется кружок меньшего диаметра и того же, но более темного цвета. Для управления направлением движения помимо кнопок я использовал так же акселерометр. При горизонтальном положении смартфона, проекция вектора ускорения силы тяжести на ось 0Y равняется 0, что соответствует движению прямо (смотрите рисунок выше).

Если приподнять левую сторону смартфона то проекция будет со знаком +, что будет соответствовать движению вправо.
Если приподнять правую сторону то со знаком -, что будет соответствовать движению влево.
Программа считывает показания акселерометра и отправляет соответствующие команды на смартфон управляющий автомобилем, отображая режим на кнопках.
SENSORS.READ 1, sx, sy, sz
IF (sy<=1)&(sy>-1)&(lrsh) THEN
rsh=1
lsh=1
lrsh=0
GR.HIDE cc13
GR.HIDE cc15
GR.SHOW cc17
GR.RENDER
BT.write "f"
pause 100
ENDIF
IF (sy>2)&(rsh) THEN
rsh=0
lsh=1
lrsh=1
GR.HIDE cc13
GR.HIDE cc17
GR.SHOW cc15
GR.RENDER
BT.write "r"
pause 100
ENDIF
IF (sy<-2)&(lsh) THEN
lsh=0
rsh=1
lrsh=1
GR.HIDE cc17
GR.HIDE cc15
GR.SHOW cc13
GR.RENDER
BT.write "l"
pause 100
ENDIF
Вот так работает пульт ДУ. Работа программы управления автомобилем тоже претерпела изменения, но не очень значительные. В дальнейшем я хочу дополнить программу функциями запоминания команд и выполнения их в автоматическом режиме.
