Программируем роботов — бесплатный робосимулятор V-REP. Первые шаги
 Программирование роботов — это интересно.
Программирование роботов — это интересно.
Многие наверное видели японских гуманоидных роботов, или французский учебный робот NAO, интересным выглядит проект обучаемого робота-манипулятор Baxter. Промышленные манипуляторы KUKA из Германии — это классика. Кто-то программирует системы конвейерной обработки (фильтрации, сортировки). Дельта роботы. Есть целый пласт — управление квадрокоптером/алгоритмы стабилизации. И конечно же простые трудяги на складе — Line Follower.
Но всё это как правило — не дешевые игрушки, поэтому доступ к роботам есть в специализированных лабораториях или институтах/школах где получили финансирование и есть эти направления. Всем же остальным разработчикам (кому интересна робототехника) — остаётся завистливо смотреть.
Некоторое время назад я вышел на достаточно интересную систему — 3д робосимулятор V-REP, от швейцарской компании Coppelia Robotics.
К своему (приятному) удивлению я обнаружил, что эта система:
имеет большой функционал (система разрабатывается с марта 2010 года) полностью open-source (выложена в открытый доступ в 2013 году) кроссплатформенная — windows, mac, linux (работает на Qt) имеет API и библиотеки для работы с роботами через C/C++, Python, Java, Lua, Matlab, Octave или Urbi бесплатная для некоммерческого использования! Все объекты, которые программируются в этой системе — «живут» в реальном с точки зрения физических законов мире — есть гравитация, можно захватывать предметы, столкновения, датчики расстояния, видео датчики и т.п.Поработав некоторое время с этой системой, я решил рассказать про неё читателям хабра.
Да, и на картинке скриншот из V-REP, и модели роботов — которые вы можете программировать, и смотреть поведение, прямо на вашем компьютере.
УстановкаУстановим на компьютер эту систему, в разделе Download: 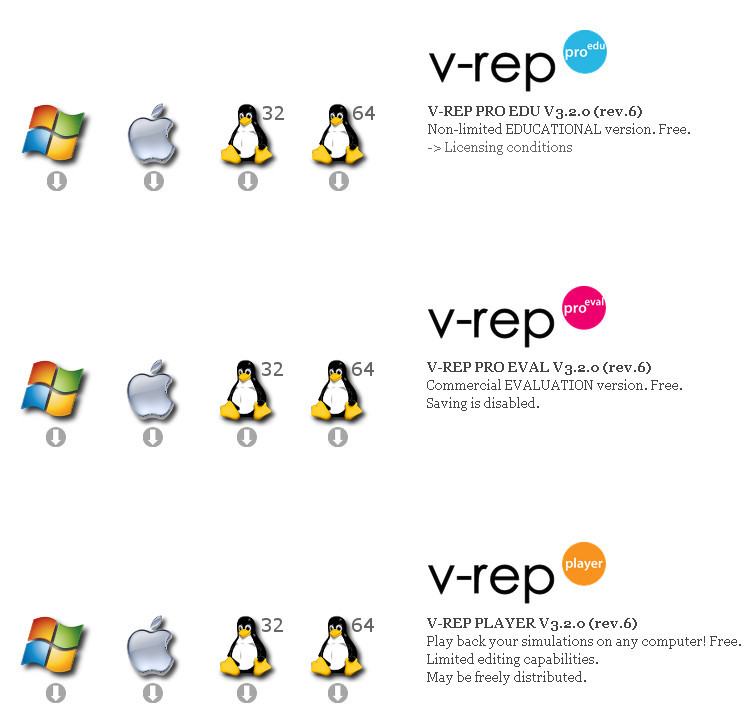 Видим три варианта: образовательный (EDU), триальный (EVAL), и плеер (player).
Видим три варианта: образовательный (EDU), триальный (EVAL), и плеер (player).
Плеер — это программа с помощью которой можно проиграть сцены созданные в полноценной версии (то есть нет возможности редактирования) — бесплатная.
Триальная — это полнофункциональная версия, в которой нет возможности сохранить. Нет лицензионных ограничений.
Образовательный — это полнофункциональный пакет, имеющий лицензионные ограничения, текст лицензии можно прочитать здесь. Суть его в том, что институты, школы, хоббисты — могут использовать бесплатно это программное обеспечение. При том, что использование не коммерческое (а образовательное).
Мы с вами вполне подходим под определение хоббистов (т.к. хотим образовательно по-программировать роботов), поэтому смело скачиваем версию EDU PRO для своей операционной системы.
В данный момент версия 3.2.0, вот прямая ссылка на windows вариант: V-REP_PRO_EDU_V3_2_0_Setup (98 Mb)
Старт
После установки, и старта мы увидим экран:  Здесь мы видим следующие объекты:
Здесь мы видим следующие объекты:
— сцена — здесь и происходит всё действо, на данный момент она пуста (есть только пол)— слева видим блок с библиотекой моделей — сверху папки, и под ней — отображается содержимое выбранной папки (выбраны robots/non-mobile — то есть стационарные роботы — манипуляторы)— далее отображается иерархия мира
Иерархия включает в себя — корневой объект (мир), в котором находятся все объекты.
В нашем примере это: 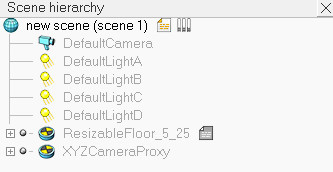
Видим источники света, видим объект для реализации пола (а это твердая поверхность, с текстурой), и группу для камер.
Есть главный объект скрипт, контролирующий сцену и всех объектов на ней, и у каждого объекта может быть свой скрипт — внутренние скрипты реализованы на языке Lua.
Вверху и слева мы видим toolbar — меню. Самой главной кнопкой является кнопка Play (Start Simulation) — после которой стартует симуляция сцены: 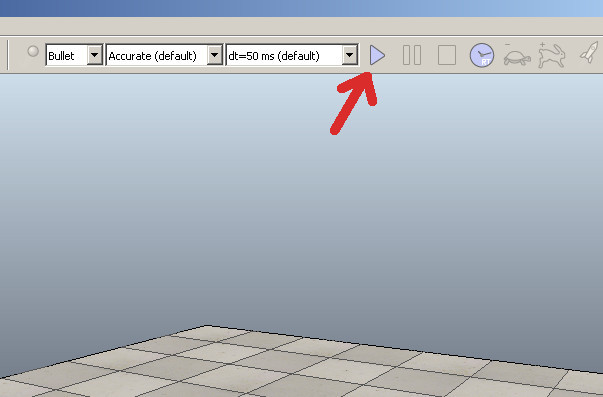
Сценарий работы следующий: — мы перетаскиваем с помощью DragAndDrop объекты из библиотеки моделей.— корректируем их местоположение— настраиваем скрипты— стартуем симулятор— останавливаем симулятор
Попробуем что-нибудь на практике.
Быстрый старт
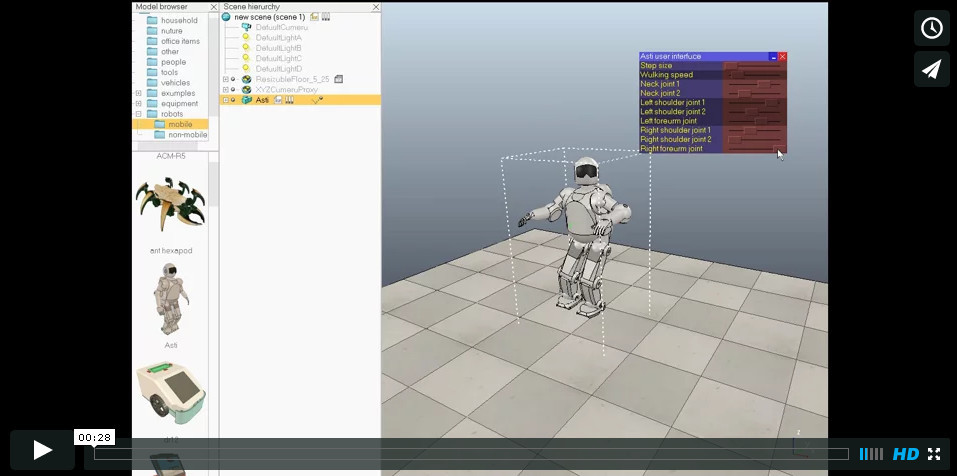
Попробуем оживить робота.Для этого выбираем слева папку robots/mobile и в списке выбираем Ansi, захватываем, переносим на сцену и отпускаем, робот появляется на нашей сцене и появляется информация об авторе: 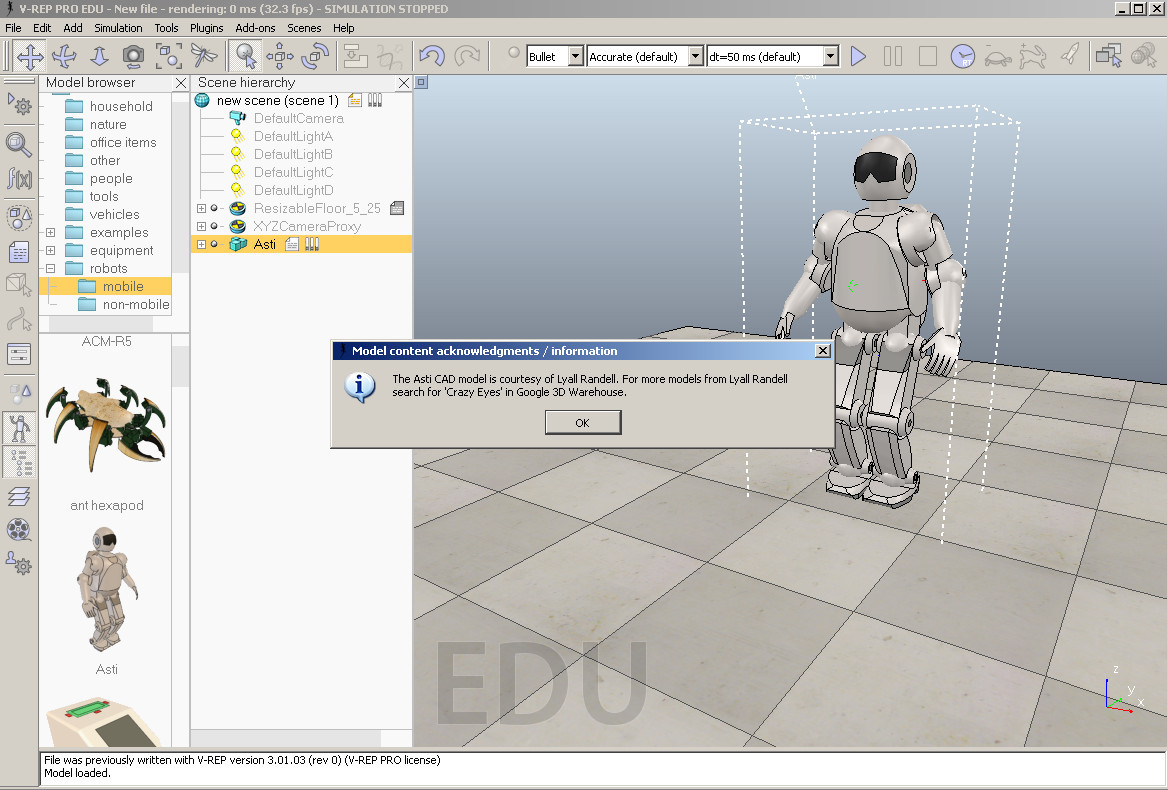
Теперь нажимаем на Start Simulation, и видим движение робота, и можем управлять положение головы, рук (реализовано через Custom User Interface), вот видео:
Далее останавливаем симуляцию: 
Скрипт управления
Можем открыть и увидеть код, который научил робота идти (управляет автономным передвижением робота). Для этого на иерархии объектов, напротив модели Asti, дважды кликаем на иконке «файл»:  Вот Lua программа, которая осуществляет движение робота:
Вот Lua программа, которая осуществляет движение робота:
Скрипт управления движением робота Asti if (sim_call_type==sim_childscriptcall_initialization) then asti=simGetObjectHandle («Asti») lFoot=simGetObjectHandle («leftFootTarget») rFoot=simGetObjectHandle («rightFootTarget») lPath=simGetObjectHandle («leftFootPath») rPath=simGetObjectHandle («rightFootPath») lPathLength=simGetPathLength (lPath) rPathLength=simGetPathLength (rPath) ui=simGetUIHandle («astiUserInterface») simSetUIButtonLabel (ui,0, simGetObjectName (asti)…» user interface») dist=0 correction=0.0305 minVal={0, — Step size 0, — Walking speed -math.pi/2, — Neck 1 -math.pi/8, — Neck 2 -math.pi/2, — Left shoulder 1 0, — Left shoulder 2 -math.pi/2, — Left forearm -math.pi/2, — Right shoulder 1 0, — Right shoulder 2 -math.pi/2} — Right forearm rangeVal={ 2, — Step size 0.8, — Walking speed math.pi, — Neck 1 math.pi/4, — Neck 2 math.pi/2, — Left shoulder 1 math.pi/2, — Left shoulder 2 math.pi/2, — Left forearm math.pi/2, — Right shoulder 1 math.pi/2, — Right shoulder 2 math.pi/2} — Right forearm uiSliderIDs={3,4,5,6,7,8,9,10,11,12}
relativeStepSize=1 nominalVelocity=0.4 neckJoints={simGetObjectHandle («neckJoint0»), simGetObjectHandle («neckJoint1»)} leftArmJoints={simGetObjectHandle («leftArmJoint0»), simGetObjectHandle («leftArmJoint1»), simGetObjectHandle («leftArmJoint2»)} rightArmJoints={simGetObjectHandle («rightArmJoint0»), simGetObjectHandle («rightArmJoint1»), simGetObjectHandle («rightArmJoint2»)} — Now apply current values to the user interface: simSetUISlider (ui, uiSliderIDs[1],(relativeStepSize-minVal[1])*1000/rangeVal[1]) simSetUISlider (ui, uiSliderIDs[2],(nominalVelocity-minVal[2])*1000/rangeVal[2]) simSetUISlider (ui, uiSliderIDs[3],(simGetJointPosition (neckJoints[1])-minVal[3])*1000/rangeVal[3]) simSetUISlider (ui, uiSliderIDs[4],(simGetJointPosition (neckJoints[2])-minVal[4])*1000/rangeVal[4]) simSetUISlider (ui, uiSliderIDs[5],(simGetJointPosition (leftArmJoints[1])-minVal[5])*1000/rangeVal[5]) simSetUISlider (ui, uiSliderIDs[6],(simGetJointPosition (leftArmJoints[2])-minVal[6])*1000/rangeVal[6]) simSetUISlider (ui, uiSliderIDs[7],(simGetJointPosition (leftArmJoints[3])-minVal[7])*1000/rangeVal[7]) simSetUISlider (ui, uiSliderIDs[8],(simGetJointPosition (rightArmJoints[1])-minVal[8])*1000/rangeVal[8]) simSetUISlider (ui, uiSliderIDs[9],(simGetJointPosition (rightArmJoints[2])-minVal[9])*1000/rangeVal[9]) simSetUISlider (ui, uiSliderIDs[10],(simGetJointPosition (rightArmJoints[3])-minVal[10])*1000/rangeVal[10]) end
if (sim_call_type==sim_childscriptcall_cleanup) then end
if (sim_call_type==sim_childscriptcall_actuation) then
— Read desired values from the user interface:
relativeStepSize=minVal[1]+simGetUISlider (ui, uiSliderIDs[1])*rangeVal[1]/1000
nominalVelocity=minVal[2]+simGetUISlider (ui, uiSliderIDs[2])*rangeVal[2]/1000
simSetJointTargetPosition (neckJoints[1], minVal[3]+simGetUISlider (ui, uiSliderIDs[3])*rangeVal[3]/1000)
simSetJointTargetPosition (neckJoints[2], minVal[4]+simGetUISlider (ui, uiSliderIDs[4])*rangeVal[4]/1000)
simSetJointTargetPosition (leftArmJoints[1], minVal[5]+simGetUISlider (ui, uiSliderIDs[5])*rangeVal[5]/1000)
simSetJointTargetPosition (leftArmJoints[2], minVal[6]+simGetUISlider (ui, uiSliderIDs[6])*rangeVal[6]/1000)
simSetJointTargetPosition (leftArmJoints[3], minVal[7]+simGetUISlider (ui, uiSliderIDs[7])*rangeVal[7]/1000)
simSetJointTargetPosition (rightArmJoints[1], minVal[8]+simGetUISlider (ui, uiSliderIDs[8])*rangeVal[8]/1000)
simSetJointTargetPosition (rightArmJoints[2], minVal[9]+simGetUISlider (ui, uiSliderIDs[9])*rangeVal[9]/1000)
simSetJointTargetPosition (rightArmJoints[3], minVal[10]+simGetUISlider (ui, uiSliderIDs[10])*rangeVal[10]/1000)
— Get the desired position and orientation of each foot from the paths (you can also use a table of values for that):
t=simGetSimulationTimeStep ()*nominalVelocity
dist=dist+t
lPos=simGetPositionOnPath (lPath, dist/lPathLength)
lOr=simGetOrientationOnPath (lPath, dist/lPathLength)
p=simGetPathPosition (rPath)
rPos=simGetPositionOnPath (rPath,(dist+correction)/rPathLength)
rOr=simGetOrientationOnPath (rPath,(dist+correction)/rPathLength)
— Now we have the desired absolute position and orientation for each foot.
— Now transform the absolute position/orientation to position/orientation relative to asimo
— Then modulate the movement forward/backward with the desired «step size»
— Then transform back into absolute position/orientation:
astiM=simGetObjectMatrix (asti,-1)
astiMInverse=simGetInvertedMatrix (astiM)
m=simMultiplyMatrices (astiMInverse, simBuildMatrix (lPos, lOr))
m[8]=m[8]*relativeStepSize
m=simMultiplyMatrices (astiM, m)
lPos={m[4], m[8], m[12]}
lOr=simGetEulerAnglesFromMatrix (m)
m=simMultiplyMatrices (astiMInverse, simBuildMatrix (rPos, rOr))
m[8]=m[8]*relativeStepSize
m=simMultiplyMatrices (astiM, m)
rPos={m[4], m[8], m[12]}
rOr=simGetEulerAnglesFromMatrix (m)
— Finally apply the desired positions/orientations to each foot
— We simply apply them to two dummy objects that are then handled
— by the IK module to automatically calculate all leg joint desired values
— Since the leg joints operate in hybrid mode, the IK calculation results
— are then automatically applied as the desired values during dynamics calculation
simSetObjectPosition (lFoot,-1, lPos)
simSetObjectOrientation (lFoot,-1, lOr)
simSetObjectPosition (rFoot,-1, rPos)
simSetObjectOrientation (rFoot,-1, rOr)
end
Другие модели
Вы можете удалить модель — для этого надо её выбрать, и нажать на Del. И можете попробовать посмотреть другие модели в работе, у некоторых есть скрипты для автономной работы.Мобильные роботы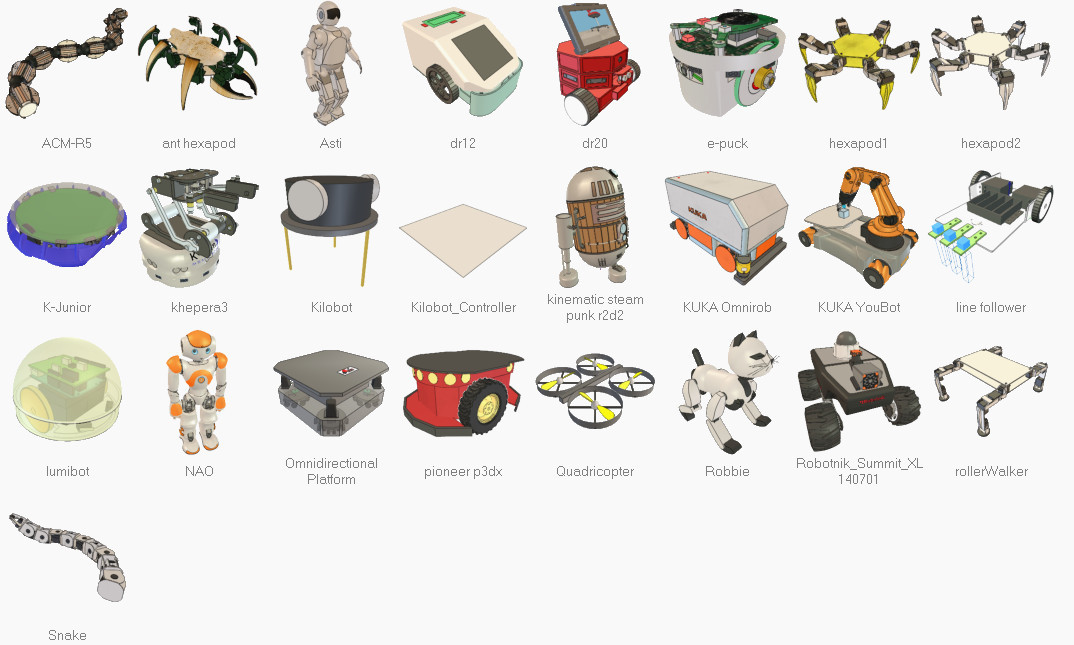
Стационарные роботы (манипуляторы)
Примеры сцен Так же есть большое количество примеров (сцен), которые поставляются сразу с программой. Для этого надо выбрать в меню «File/Open scenes» и там перейти в папку: «V-REP3/V-REP_PRO_EDU/scenes».Вот примеры сцен (файлы с расширением *.ttt):
Файлы сцен-примеров 2IndustrialRobots.ttt3DoFHolonomicPathPlanning.ttt6DoFHolonomicPathPlanning.tttBarrettHandPickAndPlace.tttblobDetectionWithPickAndPlace.tttConstraintSolverExample.tttcontrolTypeExamples.ttte-puckDemo.tttenvironmentMapping.tttexternalIkDemo.tttfabricationBlocks.tttfastClientServerCommunication.tttforwardAndInverseKinematics1.tttforwardAndInverseKinematics2.tttgearMechanism.tttgenericDialogDemo.tttghostDemo.tttImageProcessingExample.tttinverseKinematicsOf144DofManipulator.tttjansenMechanism.tttkatanaRobotWithCableSimulation.tttkhepera3.tttLineTracer-threaded.tttmillingMachine.tttmillingRobot.tttmotionPlanningAndGraspingDemo.tttmotionPlanningDemo1.tttmotionPlanningDemo2.tttmotionPlanningDemo3.tttmouseTestScene.tttnaturalSelectionAlgo.tttNonHolonomicPathPlanning.tttobjectHandling.tttPaintingRobot.tttParallelForwardAndInverseKinematics.tttpracticalPathPlanningDemo.tttproximitySensorDemo.tttreflexxesMotionLibraryType4Demo.tttrobotCollaboration1.tttrobotCollaboration2.tttrobotLanguageControl.tttrosTopicPublisherAndSubscriber.tttSocketAndTubeCommunicationExample.tttStripeScanner.tttweldingRobot.tttwirelessTransmission.tttyouBotAndHanoiTower.ttt
Ссылки * основной сайт V-REP* руководство пользователя (на английском)* большое количество видео, примеров из V-REPЧтобы поддержать популяризацию этой интересной системы на русском языке — создана русскоязычная группа по V-REP.
Применение в учебном процессе
На мой взгляд, у V-REP есть хороший потенциал применения в учебных процессах. Если вас интересует применение системы в учебном процессе — в школе, институте, в клубе робототехники и т.п. — то можете заполнить анкету. Может быть получиться консолидировать усилия и сделать учебные русскоязычные материалы.Планы на будущее
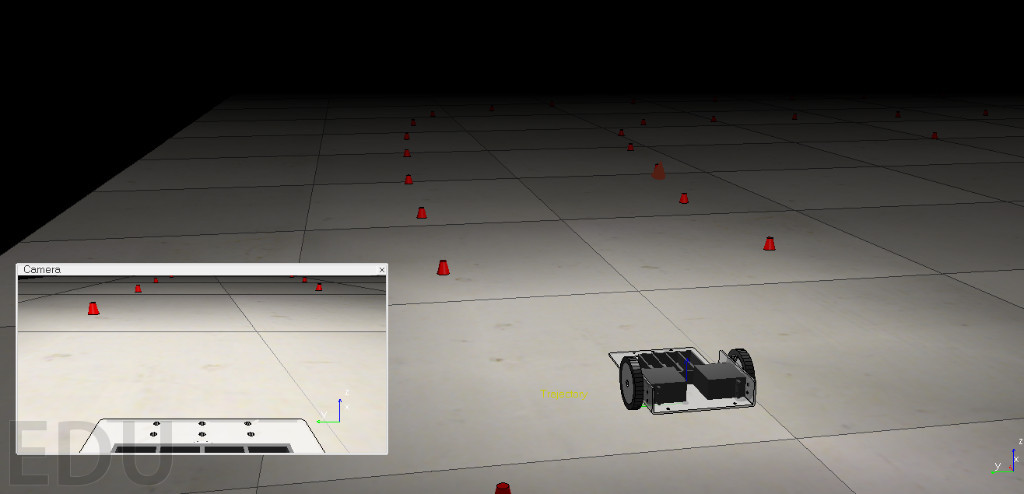 Конечно это лишь малая часть возможностей V-REP системы. В следующей публикации на примере рассмотрим создание задачи гоночного симулятора на робо-машинке от первого лица. Рассмотрим API. Создание объектов, настройка сцены и взаимодействие с пользователем.
Конечно это лишь малая часть возможностей V-REP системы. В следующей публикации на примере рассмотрим создание задачи гоночного симулятора на робо-машинке от первого лица. Рассмотрим API. Создание объектов, настройка сцены и взаимодействие с пользователем.
