Проектируем космическую ракету с нуля. Часть 5 — Первый закон Кеплера
Содержание
Часть 1 — Задача двух тел
Часть 2 — Полу-решение задачи двух тел
Часть 3 — Ужепочти-решение задачи двух тел
Часть 4 — Второй закон Кеплера
Привет всем читателям! Сразу приступим к продолжению без лишних разглагольствований. В прошлый раз остановились на:

Это дифференциальное уравнение второго порядка, где в качестве неизвестной функции — длина радиуса вектора, зависящего от времени. Здесь  как мы помним, может равняться нулю в случае прямолинейного движения вдоль радиус-вектора. Этот случай слишком прост, его даже рассматривать не будем, а кто хочет может приравнять в уравнении к нулю и дальше его решить.
как мы помним, может равняться нулю в случае прямолинейного движения вдоль радиус-вектора. Этот случай слишком прост, его даже рассматривать не будем, а кто хочет может приравнять в уравнении к нулю и дальше его решить.
Здесь попытаемся решать для  Первым что приходит в голову (в мою пришло, когда я впервые увидел это уравнение) то, что здесь нет
Первым что приходит в голову (в мою пришло, когда я впервые увидел это уравнение) то, что здесь нет  , ну, конечно, и
, ну, конечно, и  А в таких случаях (специальных) можно проводить дальнейшую замену, которая понижает порядок уравнения до первого.
А в таких случаях (специальных) можно проводить дальнейшую замену, которая понижает порядок уравнения до первого.
В общем случае уравнение второго порядка может быть записано в виде:

У нас же — уравнение попроще, когда:

А в таких случаях можно сделать замену, которая снизит порядок уравнения:

где  — новая неизвестная функция, но которая зависит не напрямую от времени, а от
— новая неизвестная функция, но которая зависит не напрямую от времени, а от  Тогда:
Тогда:

Здесь продифференцировали как сложную функцию, а потом штрихом обозначили производную по Теперь всё готово, и можно подставить:

Уравнение первого порядка, но относительно  вместо времени. Причём с разделяющимися переменными:
вместо времени. Причём с разделяющимися переменными:


Проинтегрировать не составляет труда:

Ну добавили пол константы, какая разница? Зато потом жить проще:

Пришло время вспомнить что такое :

И извлечь корень:

Уравнение опять с разделяющимися переменными, и даже интеграл вроде как берётся в элементарных функциях:

И всё бы хорошо, но проблема в том, что если мы и решим, то получим обратную зависимость, то есть времени от радиуса:

А хотелось бы наоборот:

Да еще и этот  — думать какую ветвь выбирать. Но это не самое страшное, нужно будет рассматривать разные случаи соотношений постоянных величин под корнем:
— думать какую ветвь выбирать. Но это не самое страшное, нужно будет рассматривать разные случаи соотношений постоянных величин под корнем: 
Можно, конечно, и в wolframalpha вбить и прикинуть, что будет: 
Это просто страх и ужас, а найти обратную элементарную функцию можно и не мечтать. А ведь нам еще нужно и угол искать:


Слишком муторное дело. И даже умение считать интегралы от обратных функций нас не спасет скорее всего.

Кстати, можно заметить некоторое свойство для угла  вот из этого равенства:
вот из этого равенства:
 тоже всегда больше либо меньше нуля, либо ноль. Ведь это постоянная величина (кстати, когда ноль — тогда угол постоянен и движение вдоль радиуса вектора, еще раз убедились). А это значит, что производная угла постоянна по знаку на протяжении всего движения:
тоже всегда больше либо меньше нуля, либо ноль. Ведь это постоянная величина (кстати, когда ноль — тогда угол постоянен и движение вдоль радиуса вектора, еще раз убедились). А это значит, что производная угла постоянна по знаку на протяжении всего движения:

в зависимости от знака  .
.
Иными словами сам угол — строго монотонная функция. Кто не помнит как это, вот наглядная картинка: 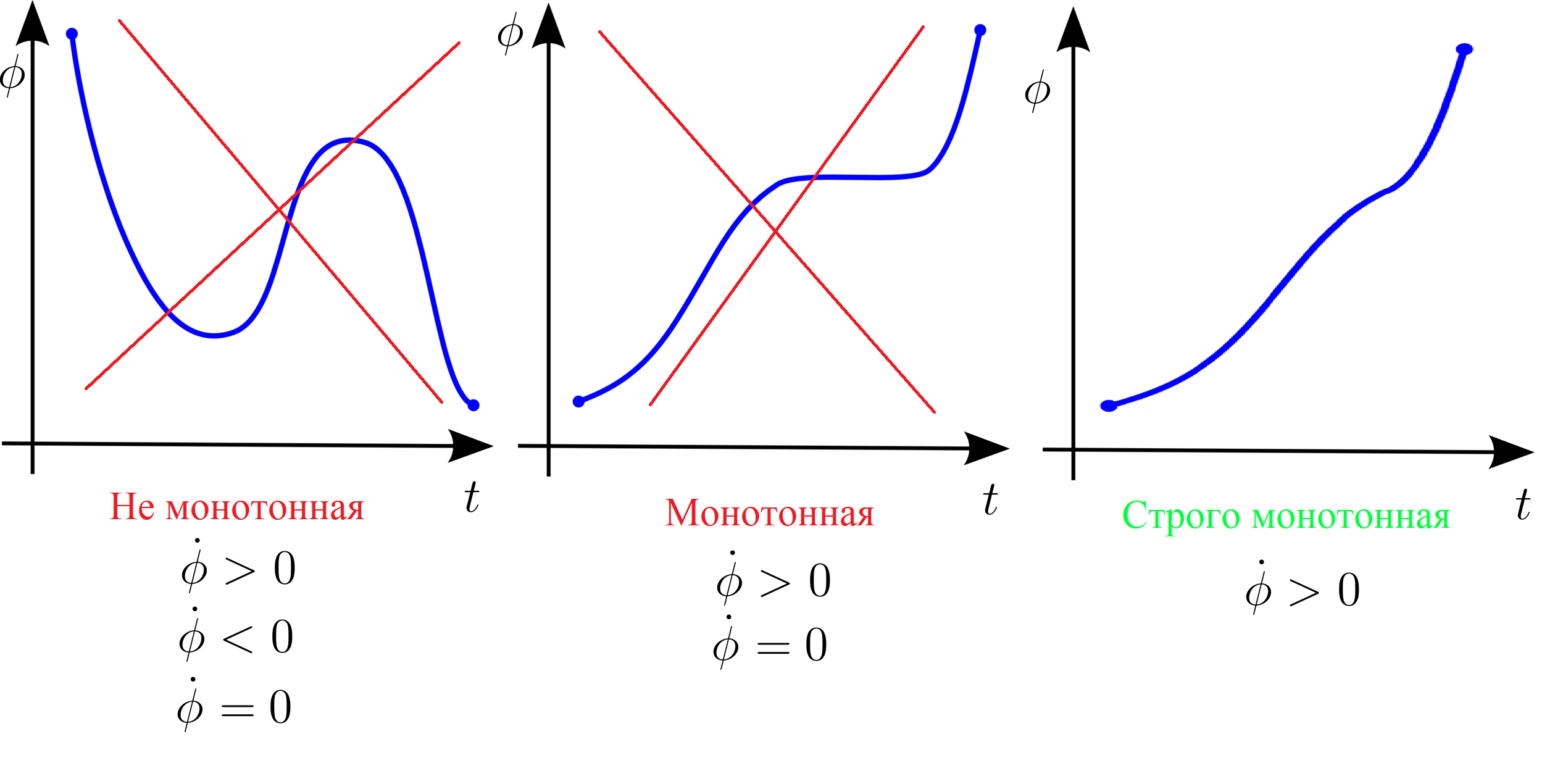
Монотонная и немонотонная функция
Этот факт подтверждает то, что мы видели при численном моделировании. Тело всегда движется в одном направлении. Никогда не останавливается (производная равна нулю) и не начинает крутиться в обратном направлении (производная изменила знак).
Соответственно траектории могут и не могут быть такими: 
Синие — возможные траектории, красные — невозможные (в полярных координатах)
Ну и анимации лишними не бывают: 
Производная  меняет знак. Таких решений у нас точно не будет.
меняет знак. Таких решений у нас точно не будет.
Кстати, а эллипсы, гиперболы и параболы (сечения конуса плоскостью) — очень даже возможны. Мы это в прошлый раз видели, численно посчитав.
Я хотел сделать свой ликбез по коническим сечениям, но сегодня мне стало лень, а статью хочется уже опубликовать. Возможно сделаю когда нибудь в будущем. А пока можно ограничиться этим: шары Данделена — вот откуда у эллипсов фокусы растут.
В полярных координатах коники можно задать так (с центром в одном из фокусов и нулевым направлением вдоль главной оси):

где  обозначает эксцентриситет, а
обозначает эксцентриситет, а  фокальный параметр.
фокальный параметр.
И о чудо, все три вида коник задаются одним уравнением, и лишь эксцентриситет определяет кем сегодня коника станет.
Эллипс ( ):
):


Эллипс
Парабола ( ):
):

Парабола
Гипербола (
Гипербола
Очень всё похоже на траектории движения спутника, полученные численным моделированием…
Как видим, здесь  — радиус как функция от угла. И выражения довольно таки простые. Так может имеет смысл найти сначала зависимость радиуса от угла, а потом угла как функции времени? Можно попробовать и проверить нашу гипотезу, что решения являются кониками.
— радиус как функция от угла. И выражения довольно таки простые. Так может имеет смысл найти сначала зависимость радиуса от угла, а потом угла как функции времени? Можно попробовать и проверить нашу гипотезу, что решения являются кониками.
Вспомним что у нас есть:
\begin{equation*}
\begin{cases}
\dot{\phi} = \dfrac{h}{\rho^{2}},
\\
\dot{\rho} = \pm\dfrac{\sqrt{C\rho^{2} + 2\mu\rho — h^{2}}}{\rho}.
\end{cases}
\end{equation*}
Поделив одно на другое, можно избавиться от  :
:


Но опять неудобно получается, наоборот:

Этот интеграл конечно можно взять и даже, скорее всего, потом найти обратную функцию труда не составит. Но есть способ попроще найти зависимость 
Мы предполагаем, что решение будет иметь такой вид:
Вот этого уравнения:
Но производная по времени, всё же. А нам бы по углу. Ничего не мешает просто сделать сложную функцию:

и дальше продифференцировать пару раз, при этом используя уже полученные нами факты ( ).
).
Но перед этим само уравнение и предполагаемое решение само просится сделать такую замену:

Тогда сама функция  будет такой:
будет такой:

А это решения вот таких элементарных диффуров:

То есть сделав последовательную замену:


Можно надеяться, что уравнение будет сведено к очень простенькому.
Приступим:



Подставляя в исходное будет так:

И продолжим, пусть теперь:





Да, немножко поднапрячься нужно, чтобы всё продифференцировать и не ошибиться, но всё-таки дифференцировать это не интегрировать. Да и вообще, всё можно машине поручить, она правильно возьмет производную. Машины, конечно, могут и интегрировать, но не всегда. А вот дифференцировать всё что угодно. Интегрирование всё-таки — это творчество и всегда ним останется IMHO (Ломать — не строить).
В итоге, что у нас есть:







Ну что, будем решать это уравнение?
Это линейное дифф. уравнение второго порядка (вторая производная) неоднородное (справа не ноль). Но неоднородность слишком не усложняет нам процесс решения, так как справа константа, еще и больше нуля всегда (h не равно нулю, кто хотел тот рассмотрел этот случай еще в самом начале, и для этого не нужно было всё выше написанное проделывать).
Стандартный метод решения, но для красивости, всё запишем, ничего не пропустим:



А значит решение будет иметь вид:

Общее решение будет как сумма однородного и частного. Частное можно искать в виде константы:

Тогда общее решение:

Дифференцируя два раза и подставляя в исходное уравнение, находим константу частного решения:



Ну вот, так совпало, что константа это и есть правая часть нашего уравнения. В итоге:

Здесь у нас две произвольные константы (уравнение всё таки второго порядка), которые определяются из начальных условий. Но проблема в том, что мы предполагали найти в таком виде решение (эллипсы, гиперболы, параболы):
Так же? Ну ничего страшного, кто хорошо знаком с тригонометрией, тот легко всё запишет как пожелает (известный трюк):


где  — две произвольные константы, выраженные через старые
— две произвольные константы, выраженные через старые  несложным образом. И нам вообще это неважно, ибо это константы.
несложным образом. И нам вообще это неважно, ибо это константы.
Таким образом имеем решение, в более-менее ожидаемом виде:

А неизвестные постоянные находятся тоже ожидаемо, для этого нам нужно значение функции в начальной точке, а также производная:
\begin{equation*}
\begin{cases}
u (0) = u_{0},
\\
u^{'}(0) = u^{'}_{0}.
\end{cases}
\end{equation*}
Не стоит также забывать, что зависимость здесь от угла, а не от времени:

Нужна производная, пожалуйста:

И система для нахождения произвольных констант:
\begin{equation*}
\begin{cases}
\dfrac{\mu}{h^{2}} + A\cos (0 — \omega) = u_{0},
\\
-A\sin (0 — \omega) = u^{'}_{0}.
\end{cases}
\end{equation*}
\begin{equation*}
\begin{cases}
A\cos (\omega) = u_{0} — \dfrac{\mu}{h^{2}} = a,
\\
A\sin (\omega) = u^{'}_{0} = b.
\end{cases}
\end{equation*}
Для удобства обозначили за a и b правые части. Теперь легко найти  возведя в квадраты равенства и сложив их:
возведя в квадраты равенства и сложив их:


Вероятно нужно будет выбрать +, ведь — это эксцентриситет. Ну да Бог с ним, потом если что и пере-обозначить можно будет в .
Начальный угол  можно найти поделив одно уравнение на другое:
можно найти поделив одно уравнение на другое:



Вроде всё нашли, но теперь бы распутать клубок с  :
:
\begin{equation*}
\begin{cases}
a = u_{0} — \dfrac{\mu}{h^{2}},
\\
b = u^{'}_{0}.
\end{cases}
\end{equation*}
Разберем и вспомним что здесь кто:

Чтобы остальное найти, нужно определиться с начальными условиями в полярной системе, они будут такие (здесь уже в начальный момент времени  ):
):
\begin{equation*}
\begin{cases}
\rho (0) = \rho_{0},
\\
\dot{\rho}(0) = \dot{\rho}_{0},
\\
\phi (0) = \phi_{0},
\\
\dot{\phi}(0) = \dot{\phi}_{0}. \\
\end{cases}
\end{equation*}
Тогда в любой момент времени:

В частности нулевой момент позволит определить постоянную :

Момент импульса в нулевой момент времени (игра слов).
И наконец:

А с производной нужно немноооожко повозиться:

То что нам нужно:

Вроде бы разобрались. Но мы то начинали не с полярной системы координат. Не с неё… Еще возни немного будет.
Как мы в полярную попали. Так:
\begin{equation*}
\begin{cases}
x = \rho\cos (\phi),
\\
y = \rho\sin (\phi).
\end{cases}
\end{equation*}
Обратно как? Так (сразу в нулевой момент):
\begin{equation*}
\begin{cases}
\rho_{0} = \sqrt{x^{2}_{0} + y^{2}_{0}},
\\
\phi_{0} = \arctan (\dfrac{y_{0}}{x_{0}}).
\end{cases}
\end{equation*}
Но если кто помнит, мы в прошлые разы направили ось  вдоль
вдоль  , а потому должно быть так:
, а потому должно быть так:

Соответственно:

Ну и не зря же мы до этого начальный угол брали ноль, в смысле здесь 
Со скоростями тоже всё просто (копируем формулы с прошлой статьи):
\begin{equation*}
\begin{cases}
\dot{x} = \dot{\rho}\cos (\phi) — \rho\sin (\phi)\dot{\phi}
\\
\dot{y} = \dot{\rho}\sin (\phi) + \rho\cos (\phi)\dot{\phi}
\end{cases}
\end{equation*}
Правда нужно наоборот, тут линейная система уравнений, решаем:
\begin{equation*}
\begin{cases}
\dot{\rho} = \dot{x}\cos (\phi) + \dot{y}\sin (\phi)
\\
\dot{\phi} = \dfrac{\dot{y}\cos (\phi) — \dot{x}\sin (\phi)}{\rho}
\end{cases}
\end{equation*}
Этим можно пользоваться даже когда начальный угол не ноль, но в нашем случае:
\begin{equation*}
\begin{cases}
\dot{\rho}_{0} = \dot{x}_{0}
\\
\dot{\phi}_{0} = \dfrac{\dot{y}_{0}}{\rho_{0}}
\end{cases}
\end{equation*}
Ну, а дальше я не стану расписывать как из начальных данных  (мы ведь с этого начинали) вычислить
(мы ведь с этого начинали) вычислить  . Скажу лишь что следующий шаг будет применение обратной матрицы преобразования, она где то в прошлых статьях затерялась. И таким образом мы обратно выйдем из плоскости в трехмерное пространство. Как ни уютно было в двумерном, но мы живем в трехмерном…
. Скажу лишь что следующий шаг будет применение обратной матрицы преобразования, она где то в прошлых статьях затерялась. И таким образом мы обратно выйдем из плоскости в трехмерное пространство. Как ни уютно было в двумерном, но мы живем в трехмерном…
На сегодня всё. Продолжение следует…
Bitcoin (BTC): 1AodAFYCbwrwTiZb5JVsQjv37G5toBcyQ
Ethereum Classic (ETC): 0×9234016395e0e6ef7cf6c0aa0f6f48f91ab39239
Ripple (XRP): rLW9gnQo7BQhU6igk5keqYnH3TVrCxGRzm (адрес), 270547561 (тег)
Bitcoin Cash (BCH): bitcoincash: qzxfz2hdcl0hv23a3hlcefsy07mglssjtgwrckhyg8
или webmoney (Ниже: Поддержать автора → Отправить деньги)
Нет столь святаго, как Господь; ибо нет другого, кроме Тебя; и нет твердыни, как Бог наш.
Не умножайте речей надменных; дерзкие слова да не исходят из уст ваших; ибо Господь есть Бог ведения, и дела у Него взвешены.
Лук сильных преломляется, а немощные препоясываются силою;
сытые работают из хлеба, а голодные отдыхают; даже бесплодная рождает семь раз, а многочадная изнемогает.
Господь умерщвляет и оживляет, низводит в преисподнюю и возводит;
Господь делает нищим и обогащает, унижает и возвышает.
Из праха подъемлет Он бедного, из брения возвышает нищего, посаждая с вельможами, и престол славы дает им в наследие; ибо у Господа основания земли, и Он утвердил на них вселенную.
Стопы святых Своих Он блюдет, а беззаконные во тьме исчезают; ибо не силою крепок человек.
Господь сотрет препирающихся с Ним; с небес возгремит на них. Господь будет судить концы земли, и даст крепость царю Своему и вознесет рог помазанника Своего.
1-я Царств 2
