Проектируем космическую ракету с нуля. Часть 2 — Полу-решение задачи двух тел
Содержание
Часть 1 — Задача двух тел
Трюкачество с заменой переменных
Приветствую всех! В прошлой части мы с вами получили уравнения движения системы из двух материальных точек, а также некоторую мотивацию на использование этой модели. Теперь же попробуем выжать как можно больше информации из них. Вот они:
\begin{equation*}
\begin{cases}
m_{1}\ddot{\vec{r}}_{1} = \vec{F}_{12}, (1)
\\
m_{2}\ddot{\vec{r}}_{2} = -\vec{F}_{12},
\end{cases}
\end{equation*}
где

Система выглядит простой, особенно если закрыть глаза и не смотреть на выражение для  . Даже, на мгновение, начинает казаться что уравнения линейные и решить её — тривиальное дело. Но куб всю малину портит, и если развернуть всё это дело и записать в фазовых координатах, то у нас задача нелинейная и вообще в 12-мерном пространстве (не поленился, набрал):
. Даже, на мгновение, начинает казаться что уравнения линейные и решить её — тривиальное дело. Но куб всю малину портит, и если развернуть всё это дело и записать в фазовых координатах, то у нас задача нелинейная и вообще в 12-мерном пространстве (не поленился, набрал):
\begin{equation*}
\begin{cases}
\dot{x}_{1} = v_{1x}
\\
\dot{y}_{1} = v_{1y}
\\
\dot{z}_{1} = v_{1z}
\\
\dot{v}_{1x} = \dfrac{G m_{2}\left (x_{2} — x_{1} \right)}{\left (\sqrt{(x_{2} — x_{1})^{2} + (y_{2} — y_{1})^{2} + (z_{2} — z_{1})^{2}} \right)^{3} }
\\
\dot{v}_{1y} = \dfrac{G m_{2}\left (y_{2} — y_{1} \right)}{\left (\sqrt{(x_{2} — x_{1})^{2} + (y_{2} — y_{1})^{2} + (z_{2} — z_{1})^{2}} \right)^{3} }
\\
\dot{v}_{1z} = \dfrac{G m_{2}\left (z_{2} — z_{1} \right)}{\left (\sqrt{(x_{2} — x_{1})^{2} + (y_{2} — y_{1})^{2} + (z_{2} — z_{1})^{2}} \right)^{3} }
\\
\dot{x}_{2} = v_{2x}
\\
\dot{y}_{2} = v_{2y}
\\
\dot{z}_{2} = v_{2z}
\\
\dot{v}_{2x} = \dfrac{G m_{1}\left (x_{1} — x_{2} \right)}{\left (\sqrt{(x_{2} — x_{1})^{2} + (y_{2} — y_{1})^{2} + (z_{2} — z_{1})^{2}} \right)^{3} }
\\
\dot{v}_{2y} = \dfrac{G m_{1}\left (y_{1} — y_{2} \right)}{\left (\sqrt{(x_{2} — x_{1})^{2} + (y_{2} — y_{1})^{2} + (z_{2} — z_{1})^{2}} \right)^{3} }
\\
\dot{v}_{2z} = \dfrac{G m_{1}\left (z_{1} — z_{2} \right)}{\left (\sqrt{(x_{2} — x_{1})^{2} + (y_{2} — y_{1})^{2} + (z_{2} — z_{1})^{2}} \right)^{3} }
\end{cases}
\end{equation*}
Если бы мы так сначала записали, то за этими деревьями леса не увидели, но Слава Богу, Он поднял нас на Свою гору Сион и с неё прекрасно видно весь лес целиком (кстати, если сейчас на Сибирь из космоса посмотреть, увидим что лес горит). И интуиция нам подскажет что делать с уравнениями 1. Эм, сложим и справа будет ноль:

Ничего не напоминает? А так:

Центр масс системы:

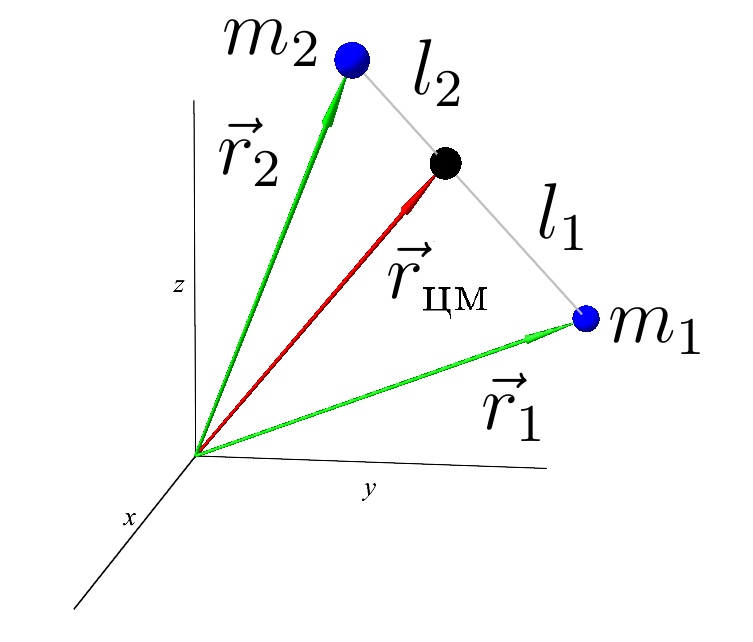
Центр масс двух тел. Отношения расстояний  и
и  равно отношению масс. Но в таком порядке, чтобы центр масс был ближе к более тяжелому телу.
равно отношению масс. Но в таком порядке, чтобы центр масс был ближе к более тяжелому телу.
а значит из 2 следует, что ускорение центра масс системы равно нулю:

но это то же, что и первый закон Ньютона. Оказывается центр масс всегда и всюду будет двигаться прямолинейно с постоянной скоростью, либо оставаться на месте. Проинтегрируем 3 пару раз (здесь как бы система диффуров, но каждая координата интегрируется независимо от остальных):


где  — векторные константы, которые являются (анализированием размерностей) начальной скоростью и начальным положением центра масс соответственно. Ну так и перепишем:
— векторные константы, которые являются (анализированием размерностей) начальной скоростью и начальным положением центра масс соответственно. Ну так и перепишем:

начальные условия пересчитать несложно:


а  — чтобы небыло недосказанности. Забыл в начале сказать, все эти начальные условия вместе с уравнениями 1 образуют задачу Коши, которая, как известно из раздела матана с диффурами, имеет чётко одно решение для каждого начального условия. А это хорошо, потому что бывают задачки посложнее, например, — краевые. Когда часть фазовых координат задается в одной точке, часть в другой точке. Бывает положение известно в начале, а скорость должна быть такой то в конце. А начальной скорости нет. И я чувствую, что такие задачки придется решать нам тоже, в будущем ;)
— чтобы небыло недосказанности. Забыл в начале сказать, все эти начальные условия вместе с уравнениями 1 образуют задачу Коши, которая, как известно из раздела матана с диффурами, имеет чётко одно решение для каждого начального условия. А это хорошо, потому что бывают задачки посложнее, например, — краевые. Когда часть фазовых координат задается в одной точке, часть в другой точке. Бывает положение известно в начале, а скорость должна быть такой то в конце. А начальной скорости нет. И я чувствую, что такие задачки придется решать нам тоже, в будущем ;)
Можно даже проверить как центр масс движется, численно решив задачку. Старенький ноут, на котором я работаю, позволит это смоделировать:
Анимация движения тел и центра масс. Численное решение
Ну хорошо. Разобрались как двигается центр масс, но этого мало! Хочется узнать как тела двигаются. Еще разок взглянем на систему:
\begin{equation*}
\begin{cases}
m_{1}\ddot{\vec{r}}_{1} = G\dfrac{m_{1}m_{2}}{|\vec{r}_{2} — \vec{r}_{1}|^{3}}\left (\vec{r}_{2} — \vec{r}_{1}\right),
\\
m_{2}\ddot{\vec{r}}_{2} = -G\dfrac{m_{1}m_{2}}{|\vec{r}_{2} — \vec{r}_{1}|^{3}}\left (\vec{r}_{2} — \vec{r}_{1}\right),
\end{cases}
\end{equation*}
или
\begin{equation*}
\begin{cases}
\ddot{\vec{r}}_{1} = G\dfrac{m_{2}}{|\vec{r}_{2} — \vec{r}_{1}|^{3}}\left (\vec{r}_{2} — \vec{r}_{1}\right),
\\
\ddot{\vec{r}}_{2} = -G\dfrac{m_{1}}{|\vec{r}_{2} — \vec{r}_{1}|^{3}}\left (\vec{r}_{2} — \vec{r}_{1}\right),
\end{cases}
\end{equation*}
И там, и там справа разность  so let’s do it quick:
so let’s do it quick:


ранее мы обозначили разность как  , но теперь переобозначим
, но теперь переобозначим  так как придется (скажу наперед) еще работать с этой штукой не раз. Ну всё, запомнили, и тогда последнее равенство примет вид:
так как придется (скажу наперед) еще работать с этой штукой не раз. Ну всё, запомнили, и тогда последнее равенство примет вид:

либо так:

где  — относительное расстояние между телами. Начало вектора
— относительное расстояние между телами. Начало вектора  в материальной точке номер 1, а конец в точке 2.
в материальной точке номер 1, а конец в точке 2.
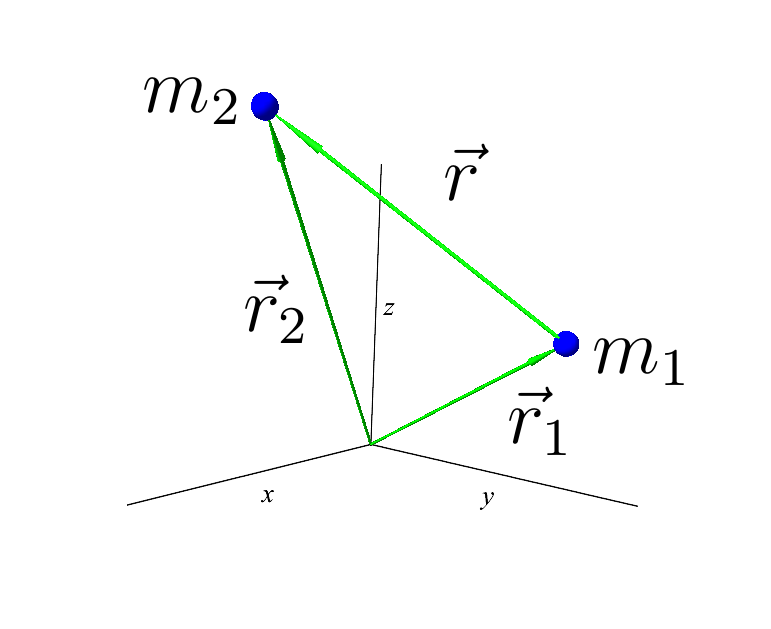
Вектор
По сути все эти трюки с центом масс и относительным расстоянием — линейное преобразование переменных:
\begin{equation*}
\begin{cases}
\vec{r}_{1} = \alpha_{1}\vec{r}_{\text{цм}} + \beta_{1}\vec{r},
\\
\vec{r}_{2} = \alpha_{2}\vec{r}_{\text{цм}} + \beta_{2}\vec{r},
\end{cases}
\end{equation*}
но пока что записано наоборот:
\begin{equation*}
\begin{cases}
\vec{r}_{\text{цм}} = \frac{m_{1}\vec{r}_{1} + m_{2}\vec{r}_{2}}{m_{1} + m_{2}},
\\
\vec{r} = \vec{r}_{2} — \vec{r}_{1},
\end{cases}
\end{equation*}
или
\begin{equation*}
\begin{cases}
\vec{r}_{\text{цм}} = \dfrac{m_{1}}{(m_{1} + m_{2})}\vec{r}_{1} + \dfrac{m_{2}}{(m_{1} + m_{2})}\vec{r}_{2},
\\
\vec{r} = — \vec{r}_{1} + \vec{r}_{2},
\end{cases}
\end{equation*}
можно и так:

И теперь домножив на обратную матрицу слева (либо каким другим способом решить эту систему), можно выразить:
\begin{equation*}
\begin{cases}
\vec{r}_{1} = \vec{r}_{\text{цм}} — \dfrac{m_{2}}{m_{1} + m_{2}}\vec{r}, (5)
\\
\vec{r}_{2} = \vec{r}_{\text{цм}} + \dfrac{m_{1}}{m_{1} + m_{2}}\vec{r}.
\end{cases}
\end{equation*}
Это преобразование позволило нам разбить задачу на две независимые: отдельно найти движение центра масс и отдельно относительное расстояние. А через них уже выразить движение в глобальной системе координат. Так что пол задачи мы уже решили — как движется центр масс мы знаем. Теперь решив 4 задача будет считаться полностью решенной. Но это уже в следующий раз.
Сейчас же, еще следует добавить анализ уравнений 5. В случае, когда одно из тел будет намного массивнее другого (прим. Земля и Человек, или Земля и яблоко Человека). Примем первое тело массивным, второе — не очень:  что значит
что значит 
В этом случае:

— что означает сосредоточение центра масс системы прямо в массивном теле 
\begin{equation*}
\begin{cases}
\vec{r}_{1} = \vec{r}_{\text{цм}} — \dfrac{1}{m_{1}}\dfrac{m_{2}}{1 + \dfrac{m_{2}}{m_{1}}}\vec{r} = \vec{r}_{\text{цм}} — \dfrac{m_{2}}{m_{1}}\dfrac{1}{1 + 0}\vec{r},
\\
\vec{r}_{2} = \vec{r}_{\text{цм}} + \dfrac{1}{m_{1}}\dfrac{m_{1}}{1 + \dfrac{m_{2}}{m_{1}}}\vec{r} = \vec{r}_{\text{цм}} + \dfrac{m_{1}}{m_{1}}\dfrac{1}{1 + 0}\vec{r}.
\end{cases}
\end{equation*}
Окончательно:
\begin{equation*}
\begin{cases}
\vec{r}_{1} = \vec{r}_{\text{цм}},
\\
\vec{r}_{2} = \vec{r}_{\text{цм}} + \vec{r}.
\end{cases}
\end{equation*}
Теперь, если перенести исходную систему координат в центр масс, получим:
\begin{equation*}
\begin{cases}
\vec{r}_{1} = 0,
\\
\vec{r}_{2} = \vec{r}.
\end{cases}
\end{equation*}
То бишь, мы связали новую координатную систему с Землей. И Земля в своей собственной коорд. системе неподвижна. Вектор уже здесь является просто радиус вектором, но в то же время остается и относительным расстоянием между телами.
Так что в следующей статье, решая это уравнение:

можно трактовать как положение спутника в системе координат связанной с Землей например.
Хотя решив его, это совершенно необязательно. Решение будет для двух произвольных тел (произвольные массы).
Продолжение следует…
Литература:
Балк М.Б. Элементы динамики космического полета, М.: Наука, Глав.ред.физ.-мат.лит.,1965. — 338с.
