Приглашаем на конкурс разработки open-source пакетов на Robot Operating System
Как ни странно современная мировая робототехника на данный момент развивается на таком феномене как ROS и open-source. Да, по каким то причинам это в России непонято и малоизвестно. Но мы — русскоязычное сообщество ROS, — пытаемся это изменить и поддержать тех энтузиастов-робототехников, которые пишут открытый код для роботов. В этой статье хотелось бы раскрыть работу над таким начинанием в виде конкурса ROS пакетов, который идет сейчас.

Краткая справка для тех, кто в первый раз сталкивается с аббревиатурой ROS: ROS это программный фреймворк для написания различных компонентов роботов, который ускоряет разработку в разы. Но это не все, ROS это на самом деле целая идеология разработки роботов и глобальное сообщество робототехников, разделяющих ценности open-source, переиспользования компонентов, обмена знаниями и опытом. Например, вот эти роботы сделаны с использованием ROS: 
Мы провели уже три российских ROS Meetup, наше сообщество в telegram — более 700 человек. У нас есть ROS комитет, который занимается организацией мероприятий. Мы неоднократно дискутировали на тему того, как же нам развивать сообщество, много копий было сломлено, прежде чем мы пришли к консенсусу. Все сошлись на том, что нас мотивирует соперничество: кто лучший робототехник, ученый, кто лучше пишет код, кто лучше знает Machine Learning и т.д. Поэтому нам показалось логичным провести конкурс, где робототехники и программисты смогут проявить свои способности и поделиться своими достижениями с другими. Так в общих обсуждениях родились положения «Конкурса открытых пакетов ROS». И мы приглашаем принять в этой нашей инициативе участие как в качестве судей жюри, так и участников конкурса.
Основными контрибьюторами ROS пакетов например являются такие университеты как Stanford, MIT, TUM. Студенты у которых таким образом образуется хорошее портфолио на github, потом попадают на работу в такие компании как Intel, Samsung, Google, которые также являются контрибьюторами в ROS.
Многие студенты и ученые которые писали ROS в WillowGarage, через некоторое время организовали свои стартапы известные в робототехнике например Fetch Robotics, Savioke.
Если посмотреть на статистику трафика официального репозитория пакетов ROS, то видно, что Россия за последние годы выпала даже из топ-15. И все, что есть популярного в сообществе, — оно только от зарубежных авторов. Пора изменить эту ситуацию, так как у нас в стране тоже есть талантливые робототехники.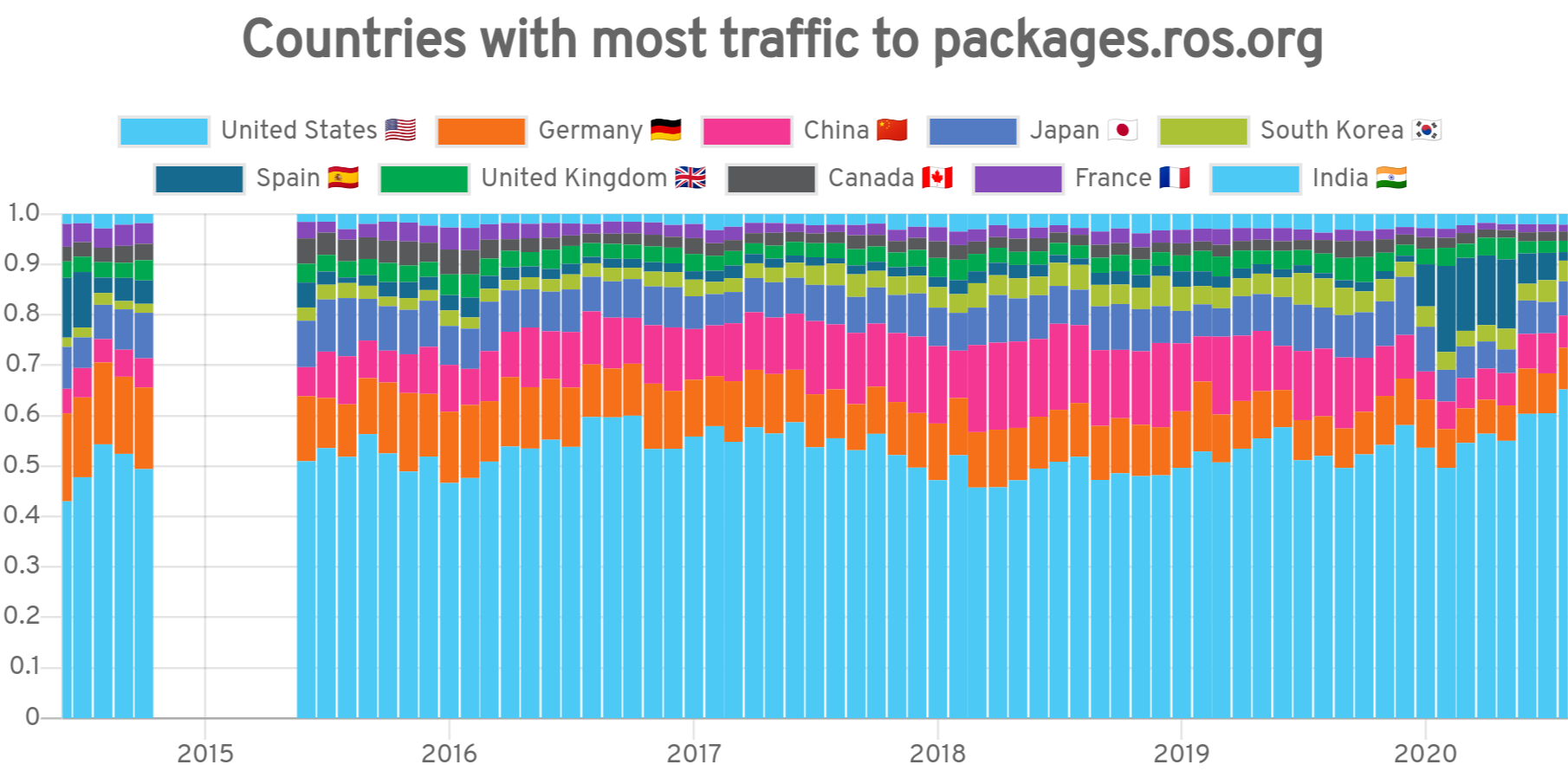
Больше информации о статистике вы можете получить в этом отчете и на сайте аналитики.
Такой конкурс — отличный способ устроить себе марафон по программированию и поделиться своими результатами с другими, найти единомышленников, чтобы потом развивать пакет вместе.
Нас поддержала компания NVIDIA, за что ей огромная благодарность. Теперь у нас есть три приза для победителей: Jetson XAVIER, TX2, Nano.
Хочется отметить, что мы про открытое сообщество, состоящее из активных членов, которые самостоятельно и независимо строят русское сообщество робототехников, поэтому мы проводим открытые собрания в ZOOM, в которых может принять участие любой желающий. Предлагаю в комментариях открыть дискуссию по поводу развития сообщества, проведения ROS meetup’ов, конкурса пакетов. Что вы об этом думаете? Какие у вас предложения? Критика? Кто хочет присоединиться? Пишите, мы будем рады любому мнению и предложению!
Правила участия в конкурсе:
- Подать заявку с темой вашего пакета. Форма регистрации.
- Написать пакет под ROS (принимаются как пакеты под ROS1 так и под ROS2) на свободную тематику (жюри будет оценивать пакеты в первую очередь с точки зрения их применимости в робототехнике, беспилотных автомобилях).
- Выложить пакет с описанием на Github, снабдив исчерпывающей документацией (в т.ч. и на русском языке).
- Приложить видео-презентацию работы вашего пакета.
- Приложить набор тестов с инструкцией по запуску, демонстрирующих исполнение его функционала. Например это может быть .bag файл или модель робота в среде Gazebo, на которых можно запустить предложенный пакет.
Такой выбор критериев призван мотивировать российских разработчиков повысить культуру разработки, документирования выпускаемых решений и умения понятно рассказать миру о своем проекте.
Критерии оценки:
- Практическая значимость
Оценивается актуальность, общая полезность пакета для ROS сообщества в целом, применимость в практических задачах, связанных с робототехникой, а также его пере используемость в задачах других участников сообщества. Т.е. если вы делаете пакет управления ракетным двигателем на основе ROS, то его практическая значимость для сообщества явно не высока (на данном этапе развития технологий). - Технический уровень (элегантность решения). Сложность и обоснованность примененных технических решений. Применение нелинейных алгоритмов управления и сложного математического аппарата будет плюсом, но только в том случае, если оно оправдано и ведет к улучшению технических характеристик. И наоборот, усложнение ради усложнения, будет приводить к снижению оценок.
- Уровень исполнения
Работоспособность заявленного функционала. Репрезентативность предложенных тестов. Исчерпываемость технической документации и читаемость кода также оценивается данным критерием.
Этапы оценки
- На показе MVP жюри оценивают видео-презентации по первым двум критериям по 20 балльной шкале.
- При сдаче результатов присланные результаты оцениваются по каждому критерию по 100 балльной шкале.
- Финальный результат получается путем сложения всех полученных оценок.
Народное голосование
Третий победитель конкурса будет выбран по итогам голосования участников сообщества. Этот участник будет награжден Nvidia Jetson Nano (голосование проводится среди участников, не получивших награды от жюри).
Положения конкурса открытых пакетов ROS.
Подведение итогов конкурса будет приурочено к следующему ROS Meetup. Предварительная дата ROS Meetup — начало декабря. Так что у тебя есть все шансы принять участие и выиграть приз!
В организационный комитет конкурса входит Лаборатория робототехники Сбер.
Предварительный состав жюри: Алексей Бурков, Александр Богословский (МИРЭА), Лада Толстенко (МИСиС), Кирилл Артемов (ИТМО). Приглашаются дополнительные участники в жюри.
И напоминаем, что найти единомышленников по разработке на ROS в России, узнать последние ROS-новости можно в нашем телеграм-канале ROS Russia community.
