Приемник с АФАР для БЛА
Цель
Для управления беспилотными объектами, типа коптер или самолётика, обычно используются узкополосные низкоскоростные модемы. Для передачи телеметрии и неспешных команд управления, вроде задания полётных точек — по быстродействию этого вполне достаточно. В этих целях важнее, скорее, обеспечить бесперебойность канала управления, нежели гнаться за быстродействием, которое может измеряться секундами.
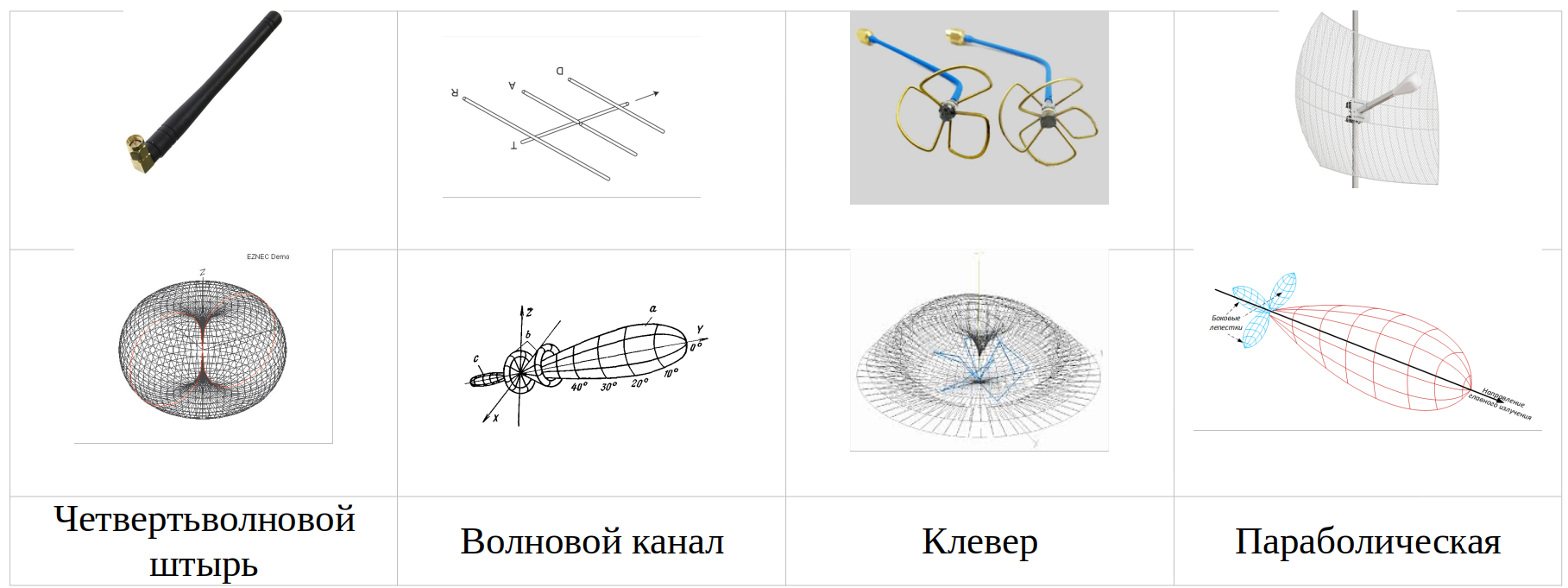
Типовым решением в данной области является использование всенаправленной антенны с интегрированного приёмо‑передатчика, типа sx1233, AX5043, на борту, и антенны с высоким коэффициентом усиления (КУ), типа волновой канал или клевер, на земле.
Пока есть прямая видимость — все должно быть хорошо.
Но, как известно, не только земля не плоская, но и прямая видимость с достаточным бюджетом мощности ещё не гарантирует успешной связи. А виной тому, зачастую, бывают помехи.
Когда борт пролетает мимо мощного источника радиоизлучения с совпадающей частотой канала — то на бортовую антенну оказывается воздействие, существенно превышающее сигнал от удалённого передатчика, и отфильтроваться полосовым фильтром оказывается невозможно.
 Обзор электромагнитной обстановки
Обзор электромагнитной обстановкиВ данной ситуации красивым решением выглядит изменение диаграммы направленности бортовой антенны таким образом, чтоб источник помехи оказался в её минимуме. Именно во столько раз и будет ослаблен паразитный сигнал, хотя и связь в канале управления тоже может ослабнуть.
 возможная ДН с четырьмя четвертьволновыми штырями
возможная ДН с четырьмя четвертьволновыми штырямиДН можно вращать механически — типа поворотного основания, но это неудобно для борта конструктивно и много весит. Гораздо интереснее попробовать электронное вращение ДН: подключить несколько антенных элементов через управляемый фазовращатель и максимально ослабить помеху противофазным их включением.
Вот это и попробуем.
Средства
В качестве антенны возьмём четыре (потому что больше трех) четвертьволновых (т. к. самое простое) штыря и разместим их на металлической пластине, по углам квадрата со стороной четверть длины волны.
 Антена АФАР. В центре — антенна передатчика
Антена АФАР. В центре — антенна передатчикаФазовращение осуществим «в лоб», на AD8340. Полученные из каналов сигналы суммируем в один и отправляем на вход уже имеющегося приёмника, развёртку ДН осуществим микроконтроллером по максимуму отношения сигнал/шум (с/ш, SNR).
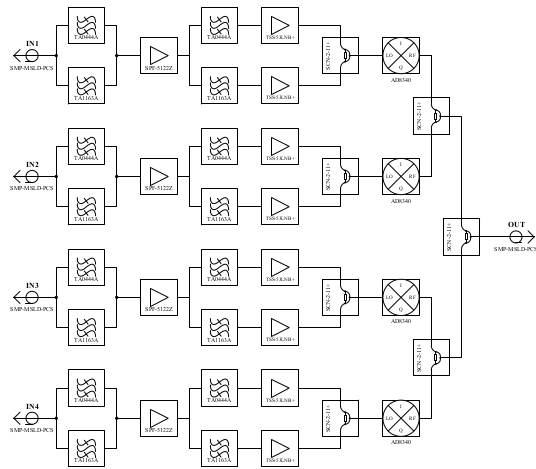 Структурна схема фазовращателя с предусилителем
Структурна схема фазовращателя с предусилителемАлгоритм простейший: поворачиваем максимум ДН до тех пор, пока лучше становиться, если перебор — крутим в обратную сторону. Поскольку передача данных идут в пакетном режиме, то поворот делаем после каждого пакета, чтоб переходными процессами чего не испортить.
Расчёт фаз для суммирования каналов проведём на основании простейшей тригонометрии: по каждому из заданных направлений радиоволны должны распространяться синфазно. Т.е. фаза — это проекция точки установки штыря на вектор направления луча.
Хинт: если из всех фаз вычесть одну их них — то этот канал можно не управлять:)
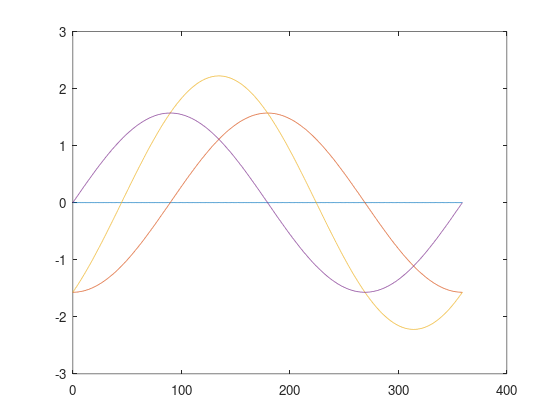 График значений фаз для развёртки ДН
График значений фаз для развёртки ДНПроверка
То, что четыре канала приёма заведомо лучше одного ‑ фактом является очевидным. Это даёт, как минимум, разнесение антенн в пространстве (antenna diversity) и дополнительное усиление сигнала. Гораздо интереснее, получится ли режектировать точечный источник помехи.
Для начала задаём в ДН одно направление и снимаем по всем углам КУ полученной фиксированной антенны тихой комнате.
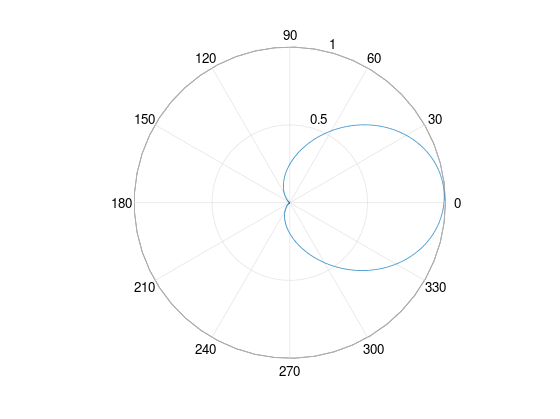
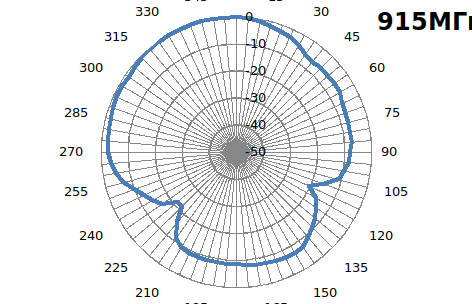 ДН АФАР при угле направления 0
ДН АФАР при угле направления 0Как видно, что-то кривенькое получилось.
Попробуем теперь полетать с помехопоставителем. В этом качестве возьмём какой-нибудь передатчик, чтоб можно было в нем задать частоту, полосу и мощность. Подадим все это на сильно направленную антенну и будем пересекать полученный луч на разных расстояниях.
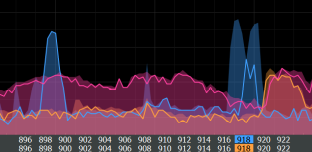
 Пример формирования тестовой помехи
Пример формирования тестовой помехиРезультаты
Если кратко — то режекция одиночно источника помехи удалась.
Если более детально — то немного не так, как ожидалось.
Предполагалось, что ДН будет иметь классический внешний вид с диаметральными минимум и максимумом. На само деле получилась достаточно кривая ДН, с паразитными минимумами. Благодаря простейшему алгоритму наведения они, рано или поздно, совпадали с помехой и существенно ослабляли её. В этот момент начиналось успешное прокидывание пакетов с данными, пока сама антенна на БЛА сравнительно медленно механически не отворачивалась (ветер, смена курса…). Если процессы наведения происходят достаточно быстро (несколько раз в секунду), то для оператора создаётся ощущение устойчивой связи с объектом.
Так же оказалось, что просто антенна это только часть большой системы из кабелей, разъёмов, элементов конструкции и погоды на марсе. Реальные ДН каждый раз получались разные, но обязательно с острыми минимумами. Но благодаря простоте алгоритма — даже в таком виде это успешно работало.
Выводы
Для попробовать ‑ полученного дорогого, энерго‑затратного, тяжёлого и плохо воспроизводимого решения вполне достаточно. Но надо прикинуть, что в этом направлении можно сделать дальше.
Самым очевидным решением является реализация модема и фазовращателя с антеннами в виде отдельного изделия. Если в самом деле есть проблемы с помехами — то идём на все эти жертвы. А если в глухой тайге полетать надо, то можно и со штырём управиться. К тому же весь этот агрегат, собранный на одной плате вместе с подложкой штырей, имеет шанс получить воспроизводимую ДН.
Так же на будущее можно подумать о замене прямого решения с микросхемами фазовращения, на изменение структуры приёмника, чтобы суммировать сигналы на промежуточной частоте. Формирование множества сдвинутых по фазе опор является стандартной задачей для современного high speed design, сами структуры гетеродинных и инфрадинных приёмников давно уже обкатаны, и более сложное по числу элементов решение может оказаться дешевле по элементной базе и энергопотреблению.
Ну и в качестве высшего пилотажа уже можно начать бороться с несколькими вредителями сразу. Для этого надо увеличивать число управляемых элементов и формировать ДН с несколькими контролируемыми вырезами, что даёт подавление нескольких источников шума по разным направлениям.
